") 時間寬度1/baud要求精確到什么范圍內(nèi)呢?
時間寬度1/baud要求精確到什么范圍內(nèi)呢?

所謂“時序”從字面意義上來理解,一是“時間問題”,二是“順序問題”。
先說“順序問題”,這個相對簡單一些。我們在學(xué) UART 串口通信的時候,先 1 位起始位,再 8 位數(shù)據(jù)位,最后 1 位停止位,這個先后順序不能錯。我們在學(xué) 1602 液晶的時候,比如寫指令,RS=L,R/W=L,D0~D7=指令碼,這三者的順序是無所謂的,但是最終的 E=高脈沖,必須是在這三條程序之后,這個順序一旦錯誤,寫的數(shù)據(jù)也可會出錯。
“時間問題”內(nèi)容相對復(fù)雜。比如 UART 通信,每一位的時間寬度是 1/baud。我們初中就學(xué)過一個概念,世界上沒有絕對的準(zhǔn)確。那么每一位的時間寬度 1/baud 要求精確到什么范圍內(nèi)呢?
前邊教程我提到過,單片機(jī)讀取 UART 的 RXD 引腳數(shù)據(jù)的時候,一位數(shù)據(jù),單片機(jī)平均分成了 16 份,取其中的 7、8、9 三次讀到的結(jié)果,這三次中有 2 次是高電平那這一位就是 1,有 2 次是低電平,那這一次就是 0。如果我們的波特率稍微有些偏差,只要累計下來到最后一位停止位,這 7、8、9 還在范圍內(nèi)即可。如圖 13-1 所示。

圖 13-1 UART 信號采集時序圖
我們用三個箭頭來表示 7、8、9 這三次的采集位置,大家可以注意到,當(dāng)采集到 D7 的時候,已經(jīng)有一次采集偏出去了,但是我們采集到的數(shù)據(jù)還是不會錯,因?yàn)橛?2 次采集正確。至于這個偏差允許多大,大家自己可以詳細(xì)算一下。實(shí)際上 UART 通信的波特率是允許一定范圍內(nèi)誤差存在的,但是不能過大,否則就會采集錯誤。大家在計算波特率的時候,發(fā)現(xiàn)沒有整除,有小數(shù)部分的時候,就要特別小心了,因?yàn)樾?shù)部分是一概被舍掉的,于是計算誤差就產(chǎn)生了。我們用 11.0592M 晶振計算的過程中,11059200/12/32/9600 得到的是一個整數(shù),如果用 12M 晶振計算 12000000/12/32/9600 就會得到一個小數(shù),大家可以算一下誤差多少,是否在誤差范圍內(nèi)。
1602 的時序問題,大家要學(xué)會通過 LCD1602 的數(shù)據(jù)手冊提供的時序圖和時序參數(shù)表格來進(jìn)行研究,而且看懂時序圖是學(xué)習(xí)單片機(jī)所必須掌握的一項(xiàng)技能,如圖 13-2 所示。
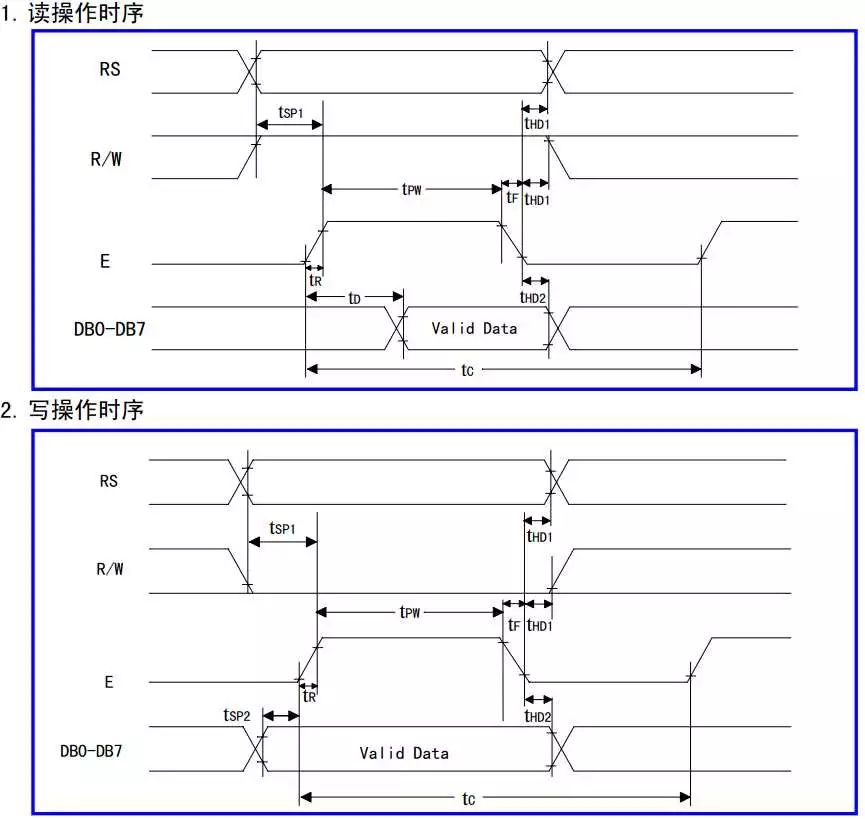
圖 13-2 1602 時序圖
大家看到這種圖的時候,不要感覺害怕。說句不過分的話,單片機(jī)這些邏輯上的問題,只要小學(xué)畢業(yè)就可以理解的,很多時候是因?yàn)榇蠹野褑栴}想象的太難才學(xué)不下去的。
我們先來看一下讀操作時序的 RS 引腳和 R/W 引腳,這兩個引腳先進(jìn)行變化,因?yàn)槭亲x操作,所以 R/W 引腳首先要置為高電平,而不管它原來是什么。讀指令還是讀數(shù)據(jù),都是讀操作,而且都有可能,所以 RS 引腳既有可能是置為高電平,也有可能是置為低電平,大家注意圖上的畫法。而 RS 和 R/W 變化了經(jīng)過 Tsp1 這么長時間后,使能引腳 E 才能從低電平到高電平發(fā)生變化。
而使能引腳 E 拉高經(jīng)過了 tD 這么長時間后,LCD1602 輸出 DB 的數(shù)據(jù)就是有效數(shù)據(jù)了,我們就可以來讀取 DB 的數(shù)據(jù)了。讀完了之后,我們要先把使能 E 拉低,經(jīng)過一段時間后 RS、R/W 和 DB 才可以變化繼續(xù)為下一次讀寫做準(zhǔn)備了。
而寫操作時序和讀操作時序的差別,就是寫操作時序中,DB 的改變是由單片機(jī)來完成的,因此要放到使能引腳 E 的變化之前進(jìn)行操作,其它區(qū)別大家可以自行對比一下。
細(xì)心的同學(xué)會發(fā)現(xiàn),這個時序圖上還有很多時間標(biāo)簽。比如 E 的上升時間 tR,下降時間時間 tF,使能引腳 E 從一個上升沿到下一個上升沿之間的長度周期 tC,使能 E 下降沿后,R/W 和 RS 變化時間間隔 tHD1 等等很多時間要求,這些要求怎么看呢?放心,只要是正規(guī)的數(shù)據(jù)手冊,都會把這些時間要求給大家標(biāo)記出來的。我們來看一下表 13-1。
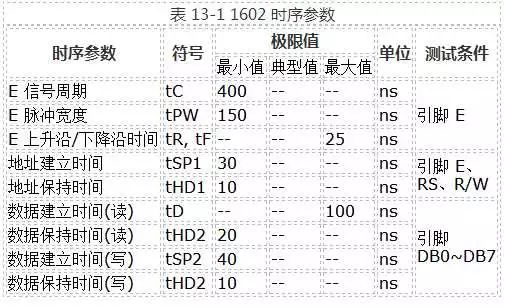
大家要善于把手冊中的這個表格和時序圖結(jié)合起來看。表 13-1 中的數(shù)據(jù),都是時序參數(shù),本節(jié)課的所有時序參數(shù),我都一點(diǎn)點(diǎn)的給大家講出來,以后遇到同類時序圖,就不再講了,只是提一下,但是大家務(wù)必要學(xué)會自己看時序圖,這個很重要,此外,看以下解釋需要結(jié)合圖 13-2 來看。
tC:指的是使能引腳 E 從本次上升沿到下次上升沿的最短時間是 400ns,而我們單片機(jī)因?yàn)樗俣容^慢,一個機(jī)器周期就是 1us 多,而一條 C 語言指令肯定是一個或者幾個機(jī)器周期的,所以這個條件完全滿足。
tPW:指的是使能引腳 E 高電平的持續(xù)時間最短是 150ns,同樣由于我們的單片機(jī)比較慢,這個條件也完全滿足。
tR, tF:指的是使能引腳 E 的上升沿時間和下降沿時間,不能超過 25ns,別看這個數(shù)很小,其實(shí)這個時間限值是很寬裕的,我們實(shí)際用示波器測了一下開發(fā)板的這個引腳上升沿和下降沿時間大概是 10ns 到 15ns 之間,完全滿足。
tSP1:指的是 RS 和 R/W 引腳使能后至少保持 30ns,使能引腳 E 才可以變成高電平,這個條件同樣也完全滿足。
tHD1:指的是使能引腳 E 變成低電平后,至少保持 10ns 之后,RS 和 R/W 才能進(jìn)行變化,這個條件也完全滿足。
tD:指的是使能引腳 E 變成高電平后,最多 100ns 后,1602 就把數(shù)據(jù)送出來了,那么我們就可以正常去讀取狀態(tài)或者數(shù)據(jù)了。
tHD2:指的是讀操作過程中,使能引腳 E 變成低電平后,至少保持 20ns,DB 數(shù)據(jù)總線才可以進(jìn)行變化,這個條件也完全滿足。
tSP2:指的是 DB 數(shù)據(jù)總線準(zhǔn)備好后,至少保持 40ns,使能引腳 E 才可以從低到高進(jìn)行使能變化,這個條件也完全滿足。
tHD2:指的是寫操作過程中,要引腳 E 變成低電平后,至少保持 10ns,DB 數(shù)據(jù)總線才可以變化,這個條件也完全滿足。
好了,表 13-1 這個 LCD1602 的時序參數(shù)表已經(jīng)解析完成了,看完之后,是不是感覺比你想象的要簡單,沒有你想的那么困難。大家自己也得慢慢學(xué)會看這種時序圖和表格,在今后的學(xué)習(xí)中,這方面的能力尤為重要。如果以后換用了其它型號的單片機(jī),那么就根據(jù)單片機(jī)的執(zhí)行速度來評估你的程序是否滿足時序要求,整體上來說器件都是有一個最快速度的限制,而沒有最慢限制,所以當(dāng)換用高速的單片機(jī)后通常都是靠在各步驟間插入軟件延時來滿足較慢的時序要求。
責(zé)任編輯:pj
-
單片機(jī)
+關(guān)注
關(guān)注
6076文章
45495瀏覽量
670357 -
液晶
+關(guān)注
關(guān)注
6文章
627瀏覽量
71287
發(fā)布評論請先 登錄
磁極寬度對永磁電機(jī)性能有哪些具體影響?

高精度寬范圍電流鏡像芯片ADL5315:電子工程師的得力助手
AGV通道寬度的影響因素

NTP時間同步技術(shù):保證網(wǎng)絡(luò)時間精確無比

電能質(zhì)量在線監(jiān)測裝置的時間同步精度要求是多少?
尋求ADF5355類似的微波源,在DC-15GHz內(nèi),鎖頻時間在1ms內(nèi)
如何校準(zhǔn)電能質(zhì)量在線監(jiān)測裝置以確保其誤差在允許范圍內(nèi)?
如何判斷電能質(zhì)量監(jiān)測裝置的數(shù)據(jù)偏差是否在允許范圍內(nèi)?

新樂K/HG02-S/DG140/70型測寬測厚儀參數(shù)優(yōu)勢
1um 以下的光刻深度,凹槽深度和寬度測量
寬度根據(jù)屏幕寬度百分比確定后,高度如何設(shè)置成與寬度相同的問題
OPA2836-Q1 汽車類雙通道、極低功耗、軌到軌輸出VFB運(yùn)算放大器技術(shù)手冊
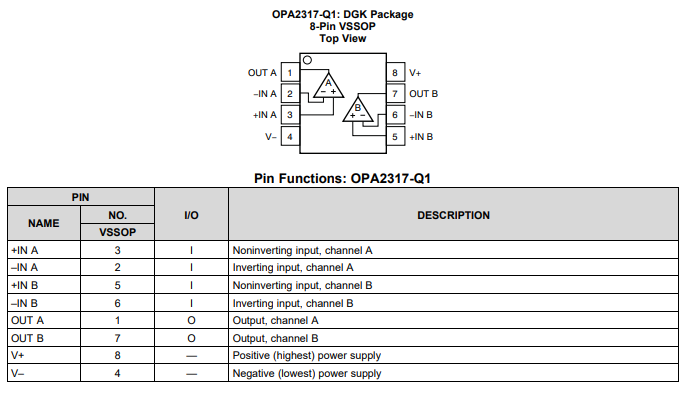
OPA2317-Q1 低偏移、軌到軌 I/O 運(yùn)算放大器技術(shù)手冊
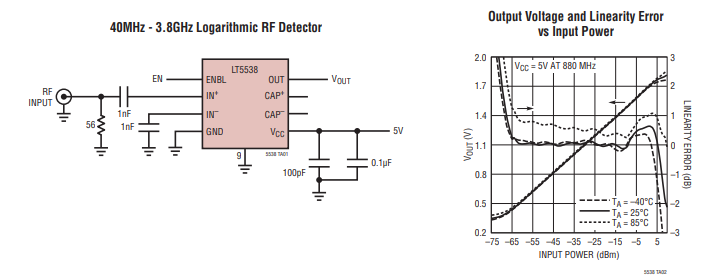
LT5538具75dB動態(tài)范圍的40MHz至3.8GHz RF功率檢波器技術(shù)手冊



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論