 KUKAC2老機器人調試工作,幫助客戶解決了擺臂.
KUKAC2老機器人調試工作,幫助客戶解決了擺臂.

近日參加了C2老機器人的調試工作,幫助客戶解決了擺臂的停擺問題.
PTP VB=100% VE=0% ACC=100% Wzg=1 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: A852 = AUS
3: A225 = EIN擺臂電機轉動
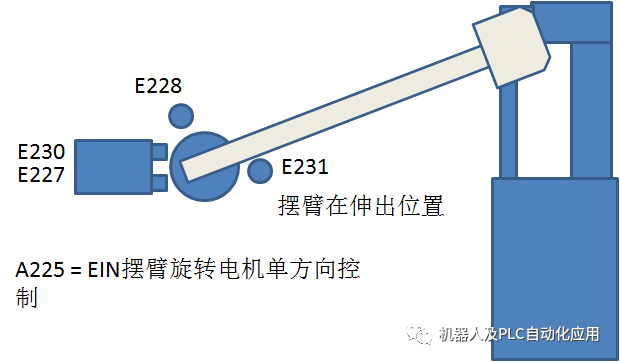
4: WARTE BIS E231 & !E227擺臂電機轉動到伸出位置
5: A225 = AUS
6: bin2 ( EIN ) = 128
7: USER_S9_Teil_1_SZ Nr1 P-Nr=131 - - SST_P-Nr=131 - EIN
9: F56 = EIN
10: F57 = AUS
11: F58 = AUS
12: F59 = AUS
13: SPSMAKRO67 = F62 + F63 銑削
14: WARTE BIS E125 & !E126 & E127 焊鉗打開到位
15: A225 = EIN 擺臂電機轉動
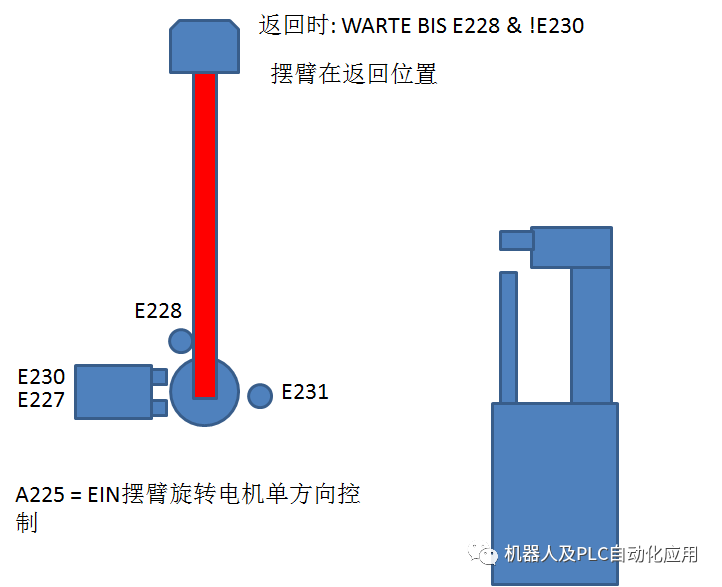
16: WARTE BIS E228 & !E230 擺臂電機轉動到返回位置
在進行手動操作擺臂的位置不能正確調整和優化.
擺臂控制由于IO控制的改變不能實現電機轉動時實現自動到位停止功能.
在VW_USR_S 程序INIT里控制終斷程序
GLOBAL INTERRUPT DECL 2 WHEN $IN[E231] ==TRUE DO KS_Abschalten()
INTERRUPT ON 2
GLOBAL INTERRUPTDECL 3 WHEN $IN[E228] == TRUE DO KS_Abschalten()
INTERRUPT ON 3
KS1_Arbeit:235=>E231 伸出到位 WARTEBIS E231 & !E227翻轉到伸出位
KS1_Ruhe:234=> E228 返回到位 WARTE BIS E228 & !E230 翻轉到返回位
KS_Abschalten()關閉擺臂銑刀程序
GLOBAL DEF KS_Abschalten() 將A234改為A225 實現了控制擺臂旋轉電機功能
IF ( $OUT[225] OR $OUT[235] OR $OUT[362] OR $OUT[363] OR $OUT[2011] OR$OUT[2012] OR $OUT[2021] OR $OUT[2022]) THEN
$OUT[234] = FALSE A225 = EIN翻轉電機啟動
$OUT[235] =FALSE
$OUT[362] =FALSE
$OUT[363] =FALSE
$OUT[2011] =FALSE
$OUT[2012] =FALSE
$OUT[2021] =FALSE
$OUT[2022] =FALSE
ENDIF
-
機器人
+關注
關注
213文章
31080瀏覽量
222293 -
電機
+關注
關注
143文章
9592瀏覽量
154127
原文標題:KUKAC2老機器人調試工作,幫助客戶解決了擺臂.
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
探索RISC-V在機器人領域的潛力
復合機器人對比傳統AGV和機械臂的優勢何在?

高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
對比AGV和協作臂,為什么要選擇復合機器人?有哪些場景和優勢

工業機器人的特點
RDK × 腿臂機器人:這只 “機械汪” 竟會說人話、走花路!

大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品




 工商網監
工商網監
評論