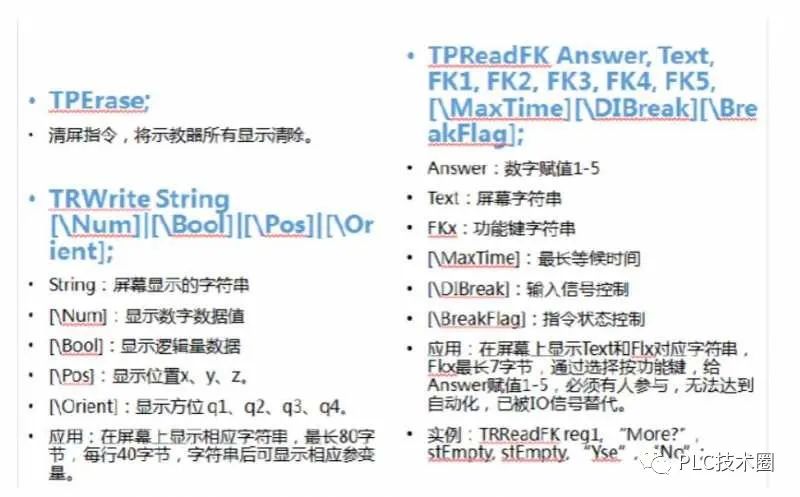
 對于OLP中Speed和Zone值的設定
對于OLP中Speed和Zone值的設定

對于OLP中Speed和Zone值的設定: Zone值一般情況下,要根據機器人運動速度和對運動的精度要求來確定,即Zone與Speed值是相關的。 1. 通常在開闊而又無高精度要求的情況下,速度值設為V3000,通常自動化把這個速度定義為Vmax,(這個Vmax與OLP中Speed值可選項中的Vmax稍不同,理論中,機器人的Vmax應該等于V8000左右,但實際情況下,這個速度僅為3000mm/s左右),此時與之對應的Zone值設置為z200—z500之間,過小的Zone值會造成機器人運動時候的停頓和擾動,特別是機器人負載較重的時候。 2. 焊接過程中,速度一般為V1000---V1500,有時候自動化也會把V1500這個速度定義為Vmid,此時設置的Zone值一般為z5--z150之間。通常情況,在這個速度下,Zone值設置為z50;空間不太受限制,也可以把Zone加大到z150;在空間比較狹小的地方,z值設置為z5—z10;對于焊點,Zone值設置為fine。 3. 速度一般為V500以下,有時候自動化也會把V500這個速度定義為Vmin,這個速度一般在位置特別緊張的情況和快換對接的位置點使用。
對于Wobj的設置:
一般來說,與工件有聯系的機器人路徑,才會設置與車型相關的wobj,如wobj-v212, wobj-w204等 ;而與工件無關的路徑,選用的就是wobj0,這個wobj是與機器人相關的,在程序輸出時,不會顯示在程序段中。換句話說,就是與工件沒有聯系的路徑,程序中不帶wobj。
與工件相關的路徑:包括機器人焊接路徑和抓放工件的dock和undock路徑。需要注意的是,在dock和undock路徑的過程中,機器人不帶抓手的部分,wobj選用的也是wobj0。

選用wobj0的路徑,包括抓放槍路徑,抓放抓手路徑,從工件存放架上抓件的pickpart路徑,修磨路徑和其他服務路徑。下圖為機器人從home點到修磨位置的路徑,可以看出程序中是不帶wobj的。 需要注意的地方:如果模擬過程中加入了工件的wobj,在程序輸出后不能直接把wobj刪除。如果在調試過程中,需要把機器人走到位后,把wobj選項改為don’t use,然后手動操作的地方改為wobj0,*后修改點的位置,這樣才能改回來。 對于機器人焊接參數spotdata的說明: 1. 對于氣動焊槍,格式為:spotdata 編號A:=[1,1];其中[1,1]表示**把焊槍,**套焊接參數。對于每一套參數,程序中不會體現壓力電流值,由焊接控制柜直接控制。 2. 對于伺服焊槍,格式為:spotdata 編號A:=[a, b, c, d]; 其中[a, b, c, d]表示,第a套參數,壓力為b,焊點處板厚為c,這套參數下板厚的公差為d。奔馳項目要求每一個焊點對應一套參數,所以公差d這一項為0。 對于spotdata的數值,在OLP模塊下,無法設置到與實際情況一致,故需要在程序輸出后做修改。 ABB機器人部分程序介紹:
對于tooldata 的說明:
通常情況下,對于每一個機器人,預留4個tool的位置,分別是兩個抓手的tool和兩個焊槍的tool。其中tool 1和2為抓手所有,命名為tool1_grip1和tool2_grip2,tool 3和4為焊槍所有,命名為tool3_gun1和tool4_gun2。如果只有焊槍,tool也是從tool3開始命名。 對于tool0,由于不能編輯負載重量,所以如果需要用tool0帶著負載來走某一段路徑,可以在原來tool0的位置新建一個tool,命名為tool10-notool,這個tool就可以輸入負載的重量,這樣在現場運用的時候,機器人就不會因為負載問題而報監控了。 一般來說,程序中只會出現這5個tool,但為了方便調試,可以在模擬時建很多的輔助TCPF,*后通過TCPF的切換,換到統一的TCPF上來就可以了。 對于互鎖的說明: 由于現場調試互鎖,工作量比較大,而且在考慮不全的情況下,很容易造成碰撞。所以自動化要求,盡量在前期模擬的時候,在有可能干涉的地方,給出提示。而且在節拍比較緊張的情況下,盡量把干涉區調整到*小,如果是中間點干涉,盡量調整到兩個軌跡不干涉。

比如說:在機器人走到某一點的時候,有可能和其他機器人發生干涉,那在這個點的前一點或更前面的點,就要提前給出提示,用備注行的形式,寫出會與哪個機器人發生干涉,如上圖的: !enter lock with R1。但是EnterZone2這個就不需要寫了,因為這個是后續和PLC交換信息時候才會用到,前期程序導入,機器人會認不到這個命令而報錯。 當然,在退出干涉區后,也應給處相應到信息,提示出了兩個機器人的干涉區。
對于PEO點設定的說明: 一般來說,一個機器人只有一個PEO點。這個點它是用機器人的關節 j1—j6 的數值來定義的,不與任何工具TCPF相關。在這個點上,機器人不管有沒有抓焊槍或抓手,都不與任何東西干涉,也就是說,在這個點上,機器人是**安全的。這樣的位置點也許會有很多,但是為了縮短機器人運動時間,在確保安全的前提下,PEO點盡量選擇在離每一條工作路徑都比較近的地方。
-
機器人
+關注
關注
213文章
31079瀏覽量
222256 -
Speed
+關注
關注
0文章
21瀏覽量
27490
原文標題:ABB機器人焊接編程程序詳細介紹
文章出處:【微信號:indRobot,微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
變頻器設定基本參數有哪些

變頻器基準參數設定依據

講解C語言代碼的實現過程
變頻器頻率輸出低于設定值詳解

探索POWR - SPEED? Fuse ESR系列高速方形體熔斷器的卓越性能
低容值和高容值貼片電容之間的區別,一文帶您了解!

利用Zone Trigger輕松捕捉復雜信號
如何設定清洗槽的溫度
在低功耗藍牙產品開發的過程中,會涉及到一些參數的選擇和設定,這些參數是什么意思,該如何設定呢?(藍牙廣播)
STM32IDE如何設定代碼到ITCM中運行?
關于交流負載模式中的CF值設置(下)

計數器的當前值與設定值應用
關于交流負載模式中的CF值設置(上)




 工商網監
工商網監
評論