 PFO飛行熱熔激光焊接
PFO飛行熱熔激光焊接

PFO飛行熱熔激光焊接
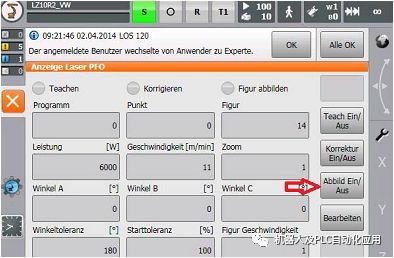
控制示意圖:
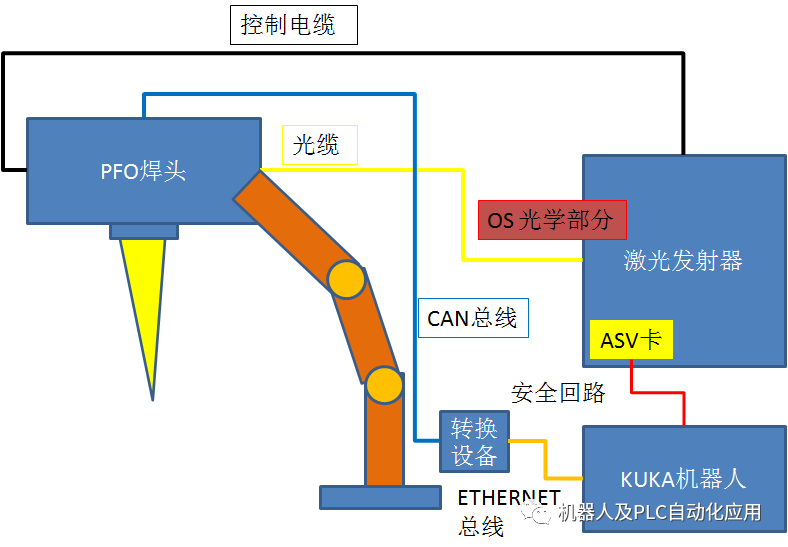
機器人使用插件:
PFODRIVER 插件
ECAT_SYS_X44插件
機器人CCU版接口X44:Ethernet總線地址:172.20.3.3
轉換器設備的設備EtherNET總線地址:172.20.3.99
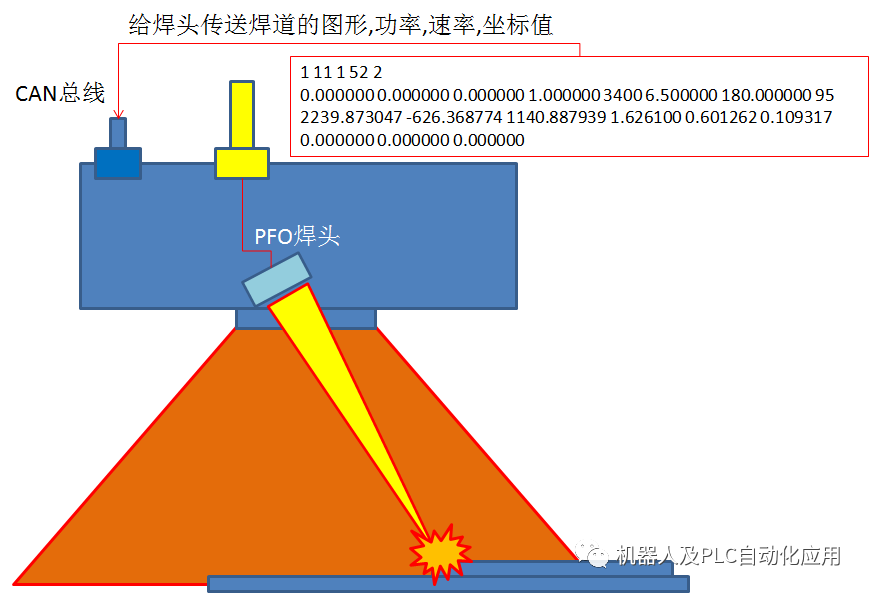
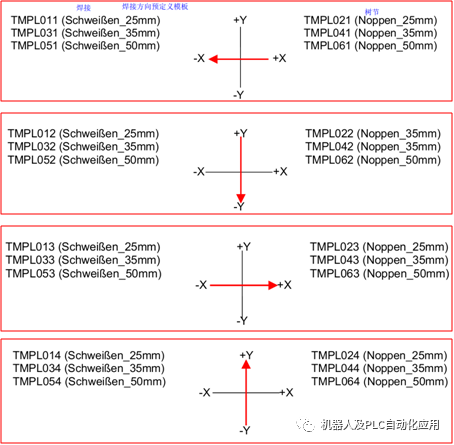
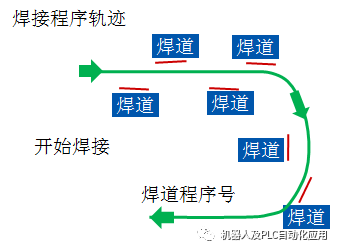
固定圖形的長度和方向用不同的圖像號來代替
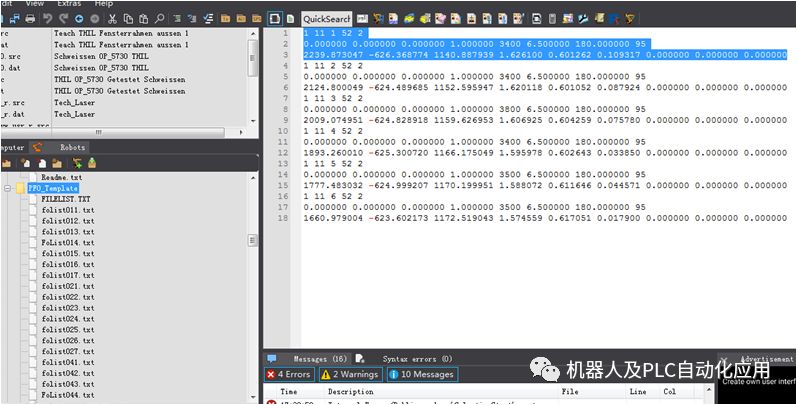
焊道位置示教程序分析
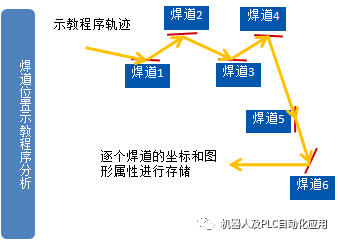
1.機器人在執行焊道位置示教程序時,當機器人運行到焊道軌跡點時,通過KUKA 用戶程序記錄焊道的程序號,焊點號,焊道圖形屬性和坐標值,然后存到PFO應用軟件數據庫里。
使用軟件庫中的標準圖形的用戶程序

2: VW_PFO VIRT_PUNKT Programm=14 Punkt=7 Betriebsart =fahre ZIRK Auftrag = Teach Template Rampe = Ende
使用圓弧進行焊接
2: VW_PFO VIRT_PUNKT Programm=14 Punkt=8 Betriebsart =fahre PTP Auftrag = Teach Template Rampe = AUS
使用PTP點到點進行焊接
3: VW_PFO VIRT_PUNKT Programm=56 Punk t=2 Betriebsart =fahre LIN Auftrag = Teach Template Rampe = AUS
使用LIN點到點進行焊接
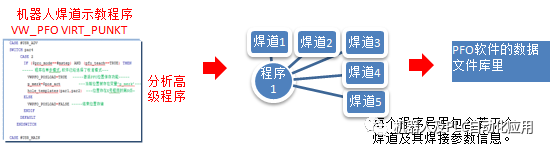
焊接程序分析
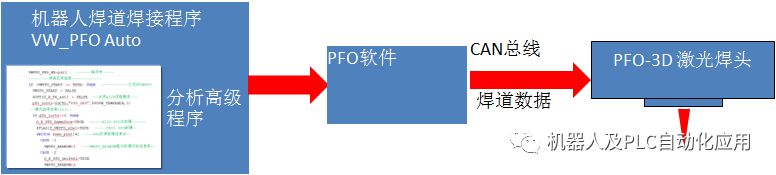
2.機器人在執行飛行焊接程序時,通過KUKA 用戶程序調用焊道的程序號,給PFO軟件,然后PFO軟件將此程序號里激活的所有焊道及其數據都通過CAN總線發送給PFO焊頭,焊頭對此程序號內所有焊道逐一進行焊接。

-
轉換器
+關注
關注
27文章
9418瀏覽量
156353 -
機器人
+關注
關注
213文章
31079瀏覽量
222259 -
焊接
+關注
關注
38文章
3563瀏覽量
63233
原文標題:KUKA機器人PFO焊頭控制方法
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
激光焊接機在焊接鋸片的工藝流程

鎢管激光熔覆修復技術的核心原理及優勢
激光焊接技術在焊接馬蹄腳工藝中的應用

激光焊接技術在焊接鈦球工藝中的應用




激光焊接技術在焊接水表工藝中的應用

激光焊接技術在焊接斜管封片工藝中的應用

激光焊接技術在焊接風機閥門工藝的應用

激光焊接技術在焊接篩鼓的工藝應用

激光焊接技術在焊接空調閥的工藝應用


激光焊接技術在焊接渦輪風扇工藝中的特點




 工商網監
工商網監
評論