") 線路跟蹤機器人的制作
線路跟蹤機器人的制作

步驟1:如何工作?
機器人之后是什么行?
顧名思義,該機器人將遵循黑線或白線。
這背后的邏輯是什么?
此機器人遵循不透明和透明表面的邏輯,通常白色表面反射光,黑色表面吸收光,
該邏輯如何在直線跟蹤機器人中使用?
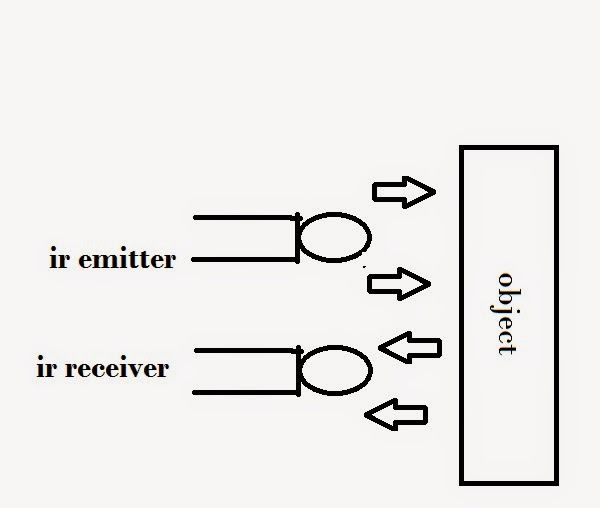
我們可以使用一個紅外傳感器,它是一對紅外發(fā)射器和發(fā)射器,紅外射線由發(fā)射器發(fā)射并由接收器接收,如果表面通常是白色或其他顏色會反射回傳感器并接收器通過這種方式開始接收,傳感器產(chǎn)生5v作為輸出,該輸出可以連接到任何邏輯電路以驅(qū)動電動機或其他設(shè)備,如果傳感器遇到黑色表面,則沒有反射光線,因此邏輯輸出將為0v
這是一條簡單而廉價的機器人系列產(chǎn)品,該機器人不需要任何編程,并且可以在沒有微控制器的情況下工作,因此,這是一個適合初學者的機器人,
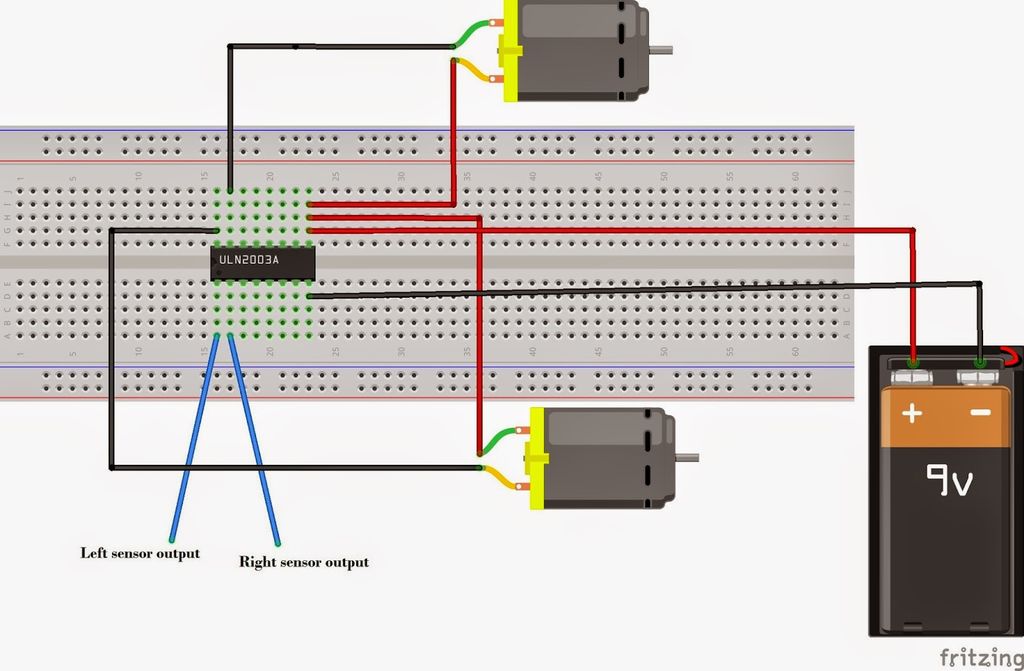
該機器人的主要組件機械手是紅外傳感器和ULN 2003A IC
只要紅外傳感器落在反射表面或白色表面上,它就會開始提供5v的輸出。 ULN 2003A是高壓,大電流的達林頓晶體管陣列。在該電路中,它充當開關(guān),每當收到5v作為輸入時,輸出開關(guān)就會斷開。如果沒有輸入,則開關(guān)閉合。
每當紅外傳感器產(chǎn)生5v的輸出時,紅外傳感器的輸出引腳就會與ULN 2003 IC的輸入引腳相連,如果有,則電動機開始運行。
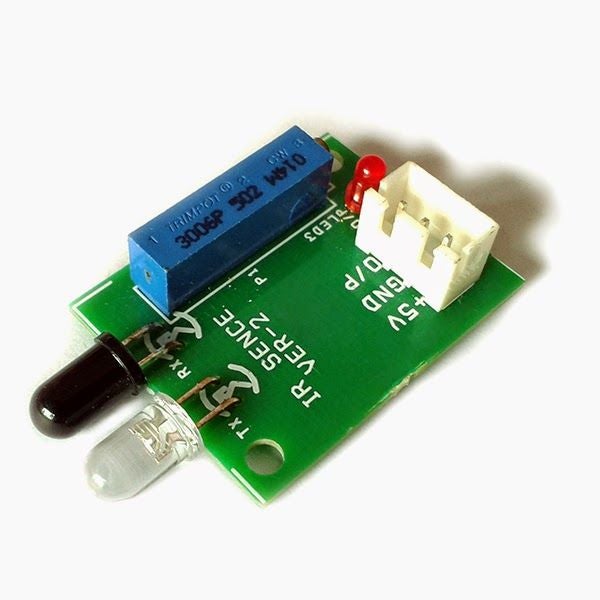
步驟2:紅外傳感器和電路
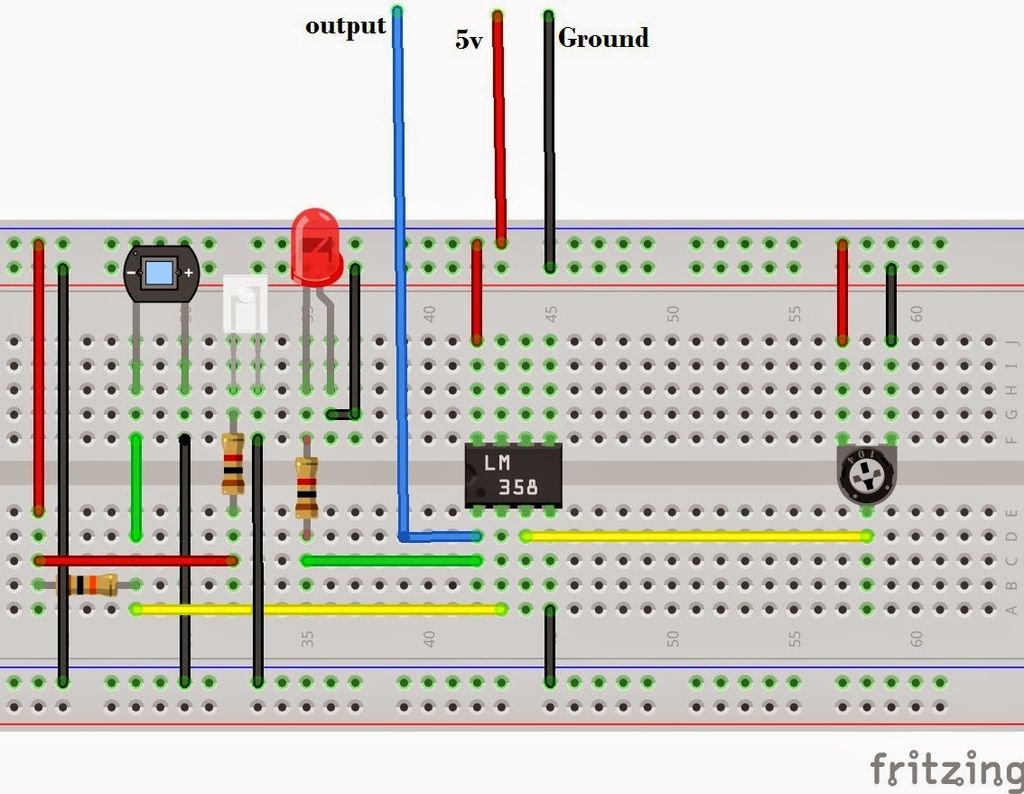
步驟3:電路Diagarm
步驟4:背后的邏輯
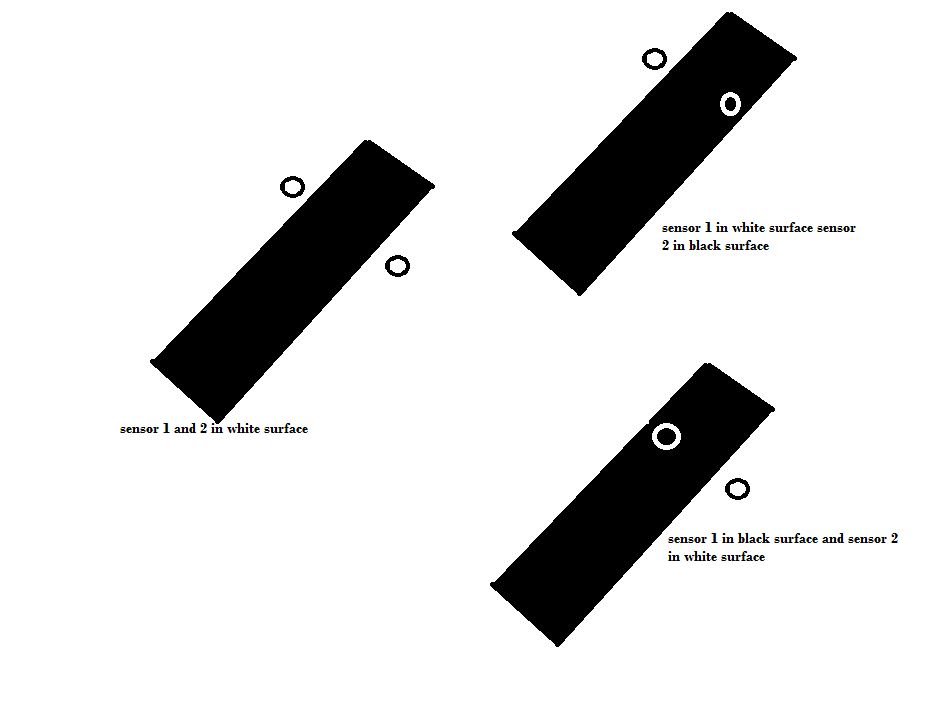
案例1
當傳感器1和2為白色時表面:
在第一種情況下,兩個傳感器都在白色表面或反射性介質(zhì)中,產(chǎn)生5v的輸出,并驅(qū)動左右電機。
案例2
當傳感器1在白色表面而傳感器2在黑色表面時:
在這種情況下,傳感器1在白色表面中并且傳感器將產(chǎn)生5v作為輸出,并且只有一個電動機旋轉(zhuǎn),這使機器人向右轉(zhuǎn)。
情況3
當傳感器2在白色表面而傳感器1在黑色表面時:
在這種情況下,傳感器2處于白色表面,傳感器將產(chǎn)生5v的輸出,并且只有一個電動機旋轉(zhuǎn),這使機器人向左旋轉(zhuǎn)。
第5步:機器人跟蹤

我們可以為機器人使用任何軌道,以上是我制作的機器人。確保黑線是不透明的并且表面是透明的。
-
機器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222255
發(fā)布評論請先 登錄
再談低溫燒結(jié)銀的應(yīng)用:從春晚四家機器人出鏡的幕后推手說起
探索RISC-V在機器人領(lǐng)域的潛力
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
什么是機器人?追溯機器人技術(shù)的演變和未來

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
工業(yè)機器人的特點
工業(yè)機器人與協(xié)作機器人概念不同




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論