 如何使用計算機控制遙控車
如何使用計算機控制遙控車

步驟1:
打開發送器后,必須首先檢查什么“刺激”了給定命令。對于我的發送器,我發現連接器“接觸”四個跳線以傳遞四個命令:前進,后退,左和右。跳線1(J1)用于反向命令,跳線2(J2)用于正向命令,跳線3(J3)用于左命令,跳線4(J4)用于右命令。
我測量了連接器與電池的正極(+)和負極(-)之間的電壓。我發現這些連接器只不過是接地(或電池的負極)而已。這意味著要使汽車前進,我們必須將J2連接到地面(電池的負極(-)側)。我將長線連接到跳線和地面,并標記了它們。
為避免與發射器一起使用電池,我將兩根線連接到電池引腳的正極(+)和負極(-)。如果我給這些電源線提供3 V的電壓,就不再需要使用電池。
步驟2:焊接一個簡單的“平移”電路
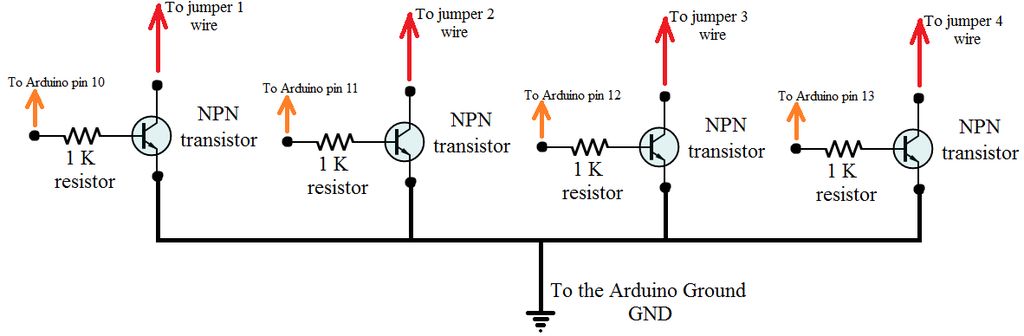
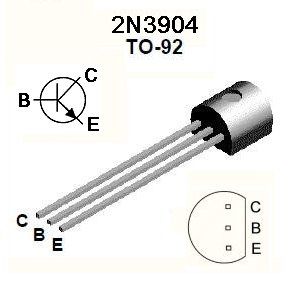
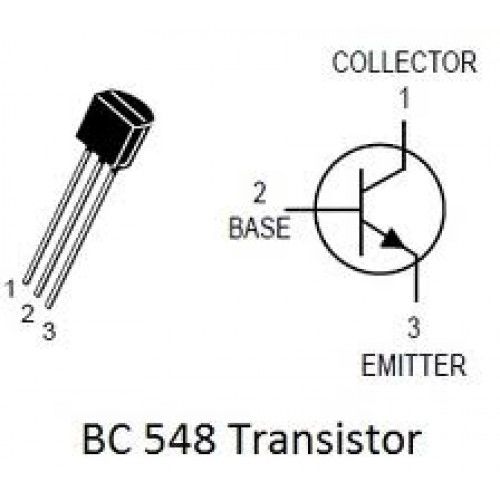
現在,我們必須制作一個簡單的電路,該電路使用Arduino命令將連接到跳線的電線接地(-)。該電路(檢查圖形)將Arduino命令“翻譯”為發送器命令。它非常簡單,并使用四個NPN晶體管和四個電阻。我使用了3x2N3904和1xBC548晶體管(家里沒有2N3904!)和4x 1K電阻器。
步驟3:設置硬件-編寫Arduino代碼
將電路焊接到發射器導線(跳線),然后將其連接到Arduino。您現在可以編寫Arduino代碼了。
我從一個簡單的代碼開始,該代碼從Arduino串行端口接收數據并相應地移動汽車。我為每個命令分配了一個字母:我選擇“ F”表示前進,“ B”表示后退,“ R”表示右命令,“ L”表示左命令,“ S”表示停止。只要Arduino從PC收到一封信,就會將適當的命令發送到發送器。 arduino的引腳11連接到發送器中的前向命令(J2),引腳10連接到后向(J1),引腳13右邊(J4),引腳12左邊(J3)。
現在,您可以使用任何從PC發送這些字母的程序(Visual Basic,C ++,MATLAB,JAVA等)。
您還可以糾正使
注意:您可以將發射器與電池或外部電源連接使用,但請確保將Arduino的GND連接到電源的(-)側供應商/電池連接器。
步驟4:進一步的改進-未來的工作
我的目標是制造一款廉價的實驗性自主機器人,用于研究。我正在考慮使用頭頂攝像頭來檢測機器人(RC汽車)的位置,并將該位置發送到根據人工智能(AI)算法控制汽車的計算機。因為我在機器人技術方面的工作是基于MATLAB的,所以我開發了MATLAB代碼,允許用戶使用鍵盤箭頭和空格鍵控制汽車。將來,我計劃將這個項目更新為具有網絡攝像頭反饋的完整無人地面車輛(UGV)。
MATLAB的主要代碼是“ RC_CarControl.m”,“ getkey.m”是讀取鍵盤上按下的按鈕的函數。一旦完成了基于圖像處理技術的位置反饋代碼,我就可以輕松合并這兩個代碼。
第5步:開心結束
-
遙控車
+關注
關注
9文章
82瀏覽量
25126 -
Arduino
+關注
關注
190文章
6526瀏覽量
197035
發布評論請先 登錄
十進制計算機硬件體系結構及“獨值”量化邏輯運算革命(一)
龍芯主板讓工控計算機擁有安全可信的核心
工控機與普通計算機的核心差異解析

龍芯中科斬獲2025中國工業計算機大會兩項殊榮
貿澤電子開售全新Arduino UNO Q單板計算機
【項目實戰】基于WS63的鴻蒙星閃紅外遙控車(循跡、超聲波避障、遠程控制、星閃/紅外遙控)有教程代碼
【作品合集】賽昉科技VisionFive 2單板計算機開發板測評
工業計算機的重要性

自動化計算機經過加固后有什么好處?
自動化計算機的功能與用途

工業計算機與商用計算機的區別有哪些

工業計算機如何設計用于沖擊和振動

一文帶你了解工業計算機尺寸

計算機網絡入門指南

NVIDIA 宣布推出 DGX Spark 個人 AI 計算機




 工商網監
工商網監
評論