 自動倒酒機器人的制作教程
自動倒酒機器人的制作教程

第1步:零件清單
電氣元件
1。導航:
(2)減速電機
超聲波距離傳感器
2。測量重量:
(5KG)直桿式微型稱重傳感器(可在廚房秤中找到)
HX711稱重傳感器
第3。顯示:
LCD屏幕(4x20)
4。澆注:
微型潛水泵(直流電機3-6V)
2n2222晶體管(EBC)
1K電阻器
1N4007二極管整流器
5。其他:
迷你面包板
電池組
跳線(M/M,F/F,F/M)
焊接鐵
DESIGN
6。現成的:
(2)車輪+萬向輪
玻璃瓶(直徑8厘米)
玻璃(直徑3.5厘米)
9毫米水管
(30)M3x16螺栓
(15)M3x16螺母
(4)M3x50螺栓
(5)M3x5螺栓
(2)M5x16螺栓
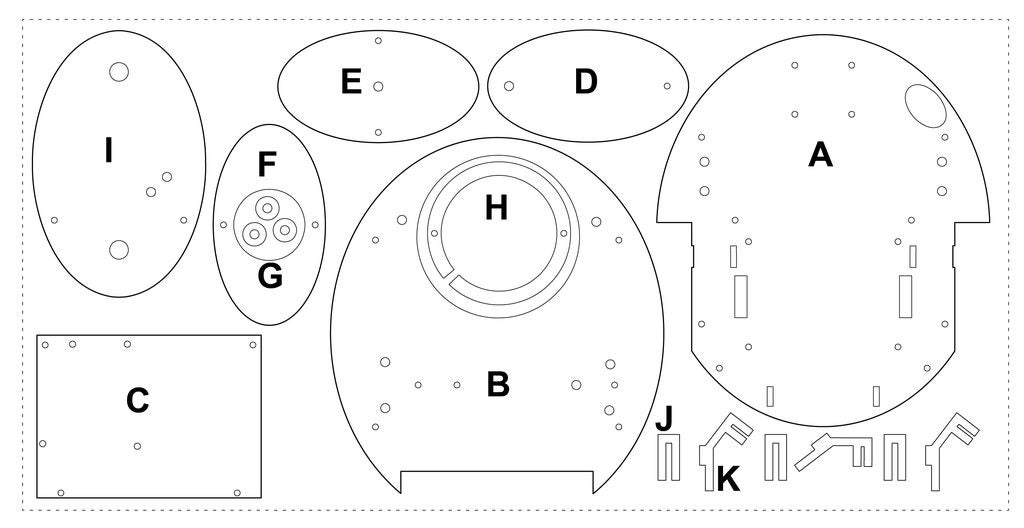
7。定制零件:
激光切割有機玻璃3.0毫米(25厘米x 50厘米):機器人機箱頂部和底部平臺,Arduino和面包板平臺,LDC支架,超聲波傳感器支架,秤頂和底部平臺,罐蓋。
3D打印部件:移動電源支架
AND 。..
很多酒精!!!
第2步:邏輯與設置

1。導航:
BotTender的導航由位于機器人前方的超聲波傳感器采集的數據控制。機器人插入電源后,機器人開始讀取與炮彈玻璃的距離并開始接近它。當它到達一定距離時,它停止并等待客戶將玻璃放在稱重傳感器板上。
直流電機和Arduino之間的通信是通過使用L293D電機驅動器IC實現的。該模塊可幫助我們控制兩個直流電機的速度和旋轉方向。雖然可以使用PWM(脈沖寬度調制)技術控制速度,但是使用H橋控制方向。
如果脈沖頻率增加,則施加在電機上的電壓也會增加,導致電機更快地旋轉。
有關使用H橋控制直流電機的更多詳細信息,請參見此處。
2。測量重量:
邏輯和電路:使用直桿式稱重傳感器和HX711ADC轉換板放大從重量傳感器接收的信號。如電路圖所示,將它們連接到Arduino和面包板。
HX711連接到:
GND:面包板( - )
DATA:引腳6時鐘:引腳2
VCC:面包板(+)
E +:連接到稱重傳感器的紅色
E-:連接到藍色
A-:連接到白色
A +:連接到BLACK
B-:無連接
B +:無連接
放大器啟用Arduino檢測稱重傳感器的電阻變化。當施加壓力時,電阻將響應于施加的壓力而改變。
設置:在我們的例子中,我們使用的是一個微型稱重傳感器(5KG)。稱重傳感器頂部和底部有2個孔,箭頭表示偏轉方向。將箭頭指向下方,將刻度的底部連接到機器人的頂部平臺。將稱重傳感器頂部的相對孔連接到秤的頂部。
連接到Arduino后,請下載本頁底部的HX711放大器庫,并使用下面提供的校準草圖校準稱重傳感器。
下載HX711庫:https://github.com/bogde/HX711
校準草圖:
3。顯示:
邏輯和電路:將LCD屏幕(4x20)連接到I2C接口。如果分開,則需要進行焊接。 I2C中間相由兩個信號組成:SCL和SDA。 SCL是時鐘信號,SDA是數據信號。 I2C連接到:
GND:面包板( - )
VCC:面包板(+)
SDA:引腳A4
SCL:pin A5
下載IC2庫:https://github.com/bogde/HX711
4。澆注:
您需要一個晶體管,一個1K電阻和一個二極管將水泵連接到Arduino。 (參考下面的電路圖)。當稱重傳感器讀取空玻璃的重量時,水泵被激活。一旦玻璃充滿,稱重傳感器讀取重量并關閉水泵。
步驟3:電路圖

第4步:代碼
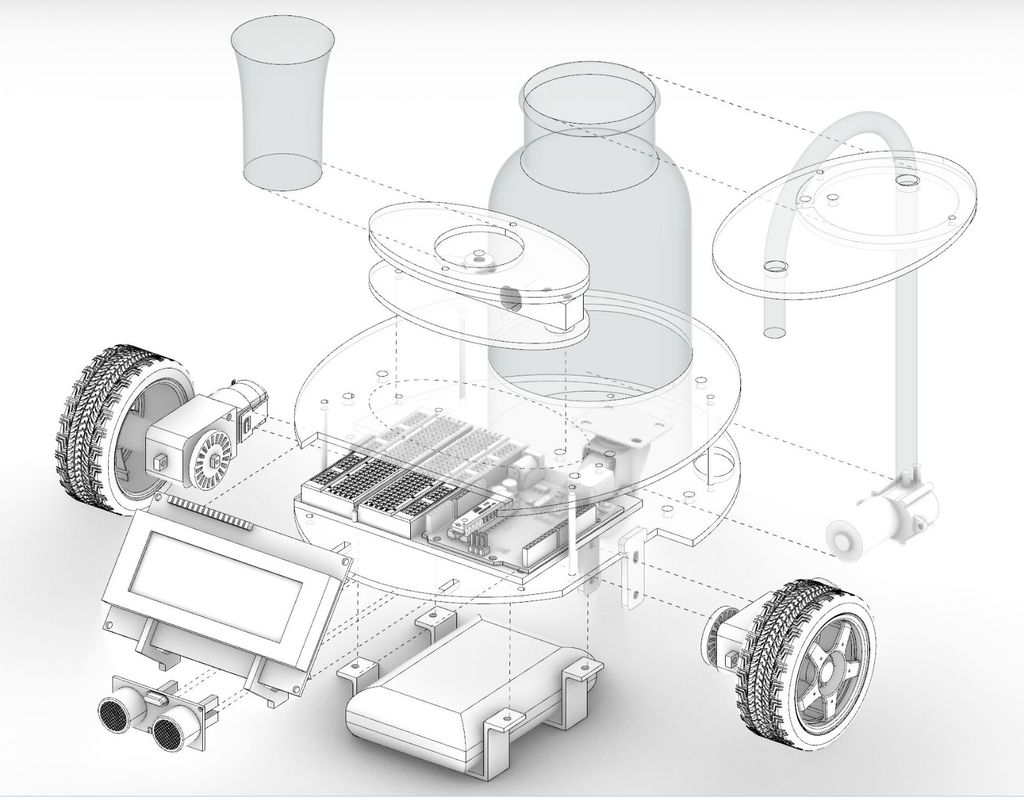
第5步:設計


設計意圖
主要設計意圖是使用透明材料并增強電子設備的存在。這不僅有助于我們更快地確定電路中的問題,而且還可以在需要維修時簡化拆卸。由于我們正在使用酒精,因此對于我們的設計來說,以緊湊的方式將電子設備和酒精盡可能分開是至關重要的。為了實現這一目標,我們將現成的產品集成到我們的定制設計中。因此,我們提出了一個多層系統,將電子設備保持在底層,并將鏡頭服務區域提升到頂層。
自定義部件:激光切割
1。正文
BotTender由兩個主要層疊在一起,只有足夠的距離,可以將電線插入arduino和面包板。底層主要用于將電機,后輪,電子平臺和電池座連接到機身,以及作為瓶子的底座,頂層容納一個孔來穩定瓶子和足夠的空間用于稱重傳感器及其板。
2。稱重傳感器板
稱重傳感器板的設計考慮了廚房秤的工作原理。稱重傳感器從其螺栓孔連接到頂層和底層。在頂層上放置另一層,以指示放置小玻璃并將其保持在適當位置的精確槽。
3。 LCD和超聲波傳感器支架
LCD支架設計用于使屏幕與地平面保持45度旋轉,而超聲波傳感器支架可使傳感器保持垂直并盡可能靠近地面,以便輕松檢測鏡頭玻璃。
4。瓶蓋
我們設計了一個瓶蓋,可以將飲料保持在封閉的環境中,但仍允許 管和水泵電纜從瓶中出來。蓋子有2層:頂層用于保持管子就位,底層用于將蓋子鎖定在瓶子上,并使水泵電纜可以接觸到arduino。然后通過使用側面上的相應小孔將這兩個層彼此連接以插入螺栓。
自定義部件:3D打印
5。移動電源持有人
對于我們的BotTender,我們決定使用外部電源:移動電源。因此,我們需要一個定制的電池座,用于我們選擇的移動電源的尺寸。在Rhinoceros中設計這件作品后,我們使用黑色PLA進行3D打印。然后使用鉆頭打開螺栓孔。
步驟6:制造和組裝

大部分定制零件在我們的設計是通過激光切割(1)3mm有機玻璃板(25cmx50cm)實現的。只有移動電源支架是3D打印的,但如果需要,可以用激光切割件代替。
焊接:
需要焊接一些東西。 I2C接口的16個引腳連接到LCD屏幕,水泵接地和電源線連接到公跳線,HX711放大器連接到稱重傳感器,齒輪電機連接到跳線。
激光切割后,電子元件已經焊接完畢,電路組裝在Arduino和面包板上,開始按如下方式組裝機器人:
逐步組裝:
使用底部平臺并使用螺栓連接后輪。
使用提供的附件將齒輪電機連接到車輪,然后連接到平臺的底部。
使用3D打印的電池座,將移動電源板連接到平臺的底部。
用4個螺栓將小底板安裝到底部平臺上。
安裝Arduino和面包板。確保Arduino位于右側,以便更輕松地連接到下方的移動電源。此時,您的電路需要在適當的位置完成。
使用頂部和底部底板組裝稱重傳感器。指示重量容量的箭頭需要指向下方。
將稱重傳感器設置安裝到頂部平臺,并將平臺連接到機器人主體的底部。
使用支架安裝超聲波傳感器和LCD。如有必要,可以粘貼這些。
將水管連接到水泵上,然后將泵引入玻璃瓶內。確保電纜插入所提供的孔之間。
將玻璃瓶和玻璃杯放在適當的位置。
將酒精倒入玻璃罐中,您就可以使用BotTender了!
-
機器人
+關注
關注
213文章
31092瀏覽量
222330
發布評論請先 登錄
工業機器人TOP1,切入人形機器人賽道,意欲何為?

高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
什么是機器人?追溯機器人技術的演變和未來

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
工業機器人的特點
工業機器人與協作機器人概念不同




 工商網監
工商網監
評論