") 關(guān)于機器人設(shè)計到實現(xiàn)的三個核心問題的分線和介紹
關(guān)于機器人設(shè)計到實現(xiàn)的三個核心問題的分線和介紹

從開始設(shè)計機器人到功能實現(xiàn),這三個核心問題是作為工程師和科研人員必須要解決的:
機器人系統(tǒng)的設(shè)計和仿真
機器人算法早期驗證
連接機器人平臺和外設(shè)
使用MATLAB和Simulink,加速機器人從設(shè)計仿真到最終實現(xiàn)的每一步。
機器人的系統(tǒng)設(shè)計和仿真
機器人系統(tǒng)的設(shè)計是一個多領(lǐng)域?qū)W科的話題,包括機械、電子、軟件、運動學(xué)等。MATLAB和Simulink在設(shè)計早期可以進行基于多學(xué)科的仿真和計算,在不具備硬件的情況下對機器人系統(tǒng)和算法進行調(diào)試驗證,達(dá)到了早發(fā)現(xiàn)錯誤、節(jié)約成本的目的。
在機器人設(shè)計的最初階段,MATLAB可以借助其Symbolic Math Toolbox進行基于運動學(xué)和動力學(xué)的數(shù)值求解,從數(shù)學(xué)的角度進行可行性證明。
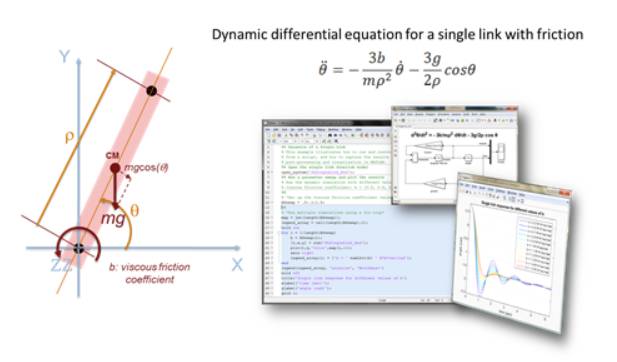
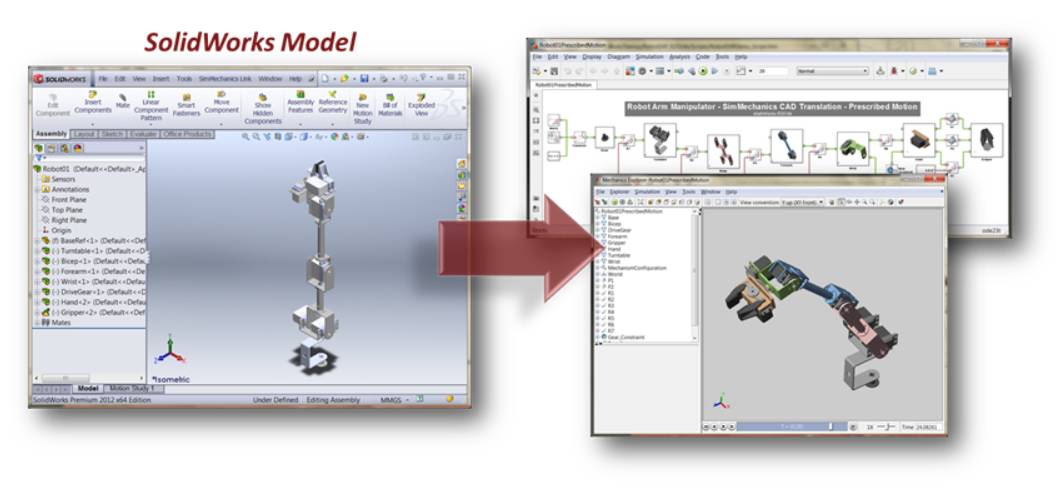
在證明的運動和動力學(xué)的數(shù)學(xué)模型正確后,可以借助SimMultibody將CAD模型導(dǎo)入,形成機器人的被控對象模型的機械部分。
在確認(rèn)被控對象的的機械部分的正確性后,在機械關(guān)節(jié)部位用SimElectronics加入電機模型和角度傳感器模型,即被控對象模型的電子部分。
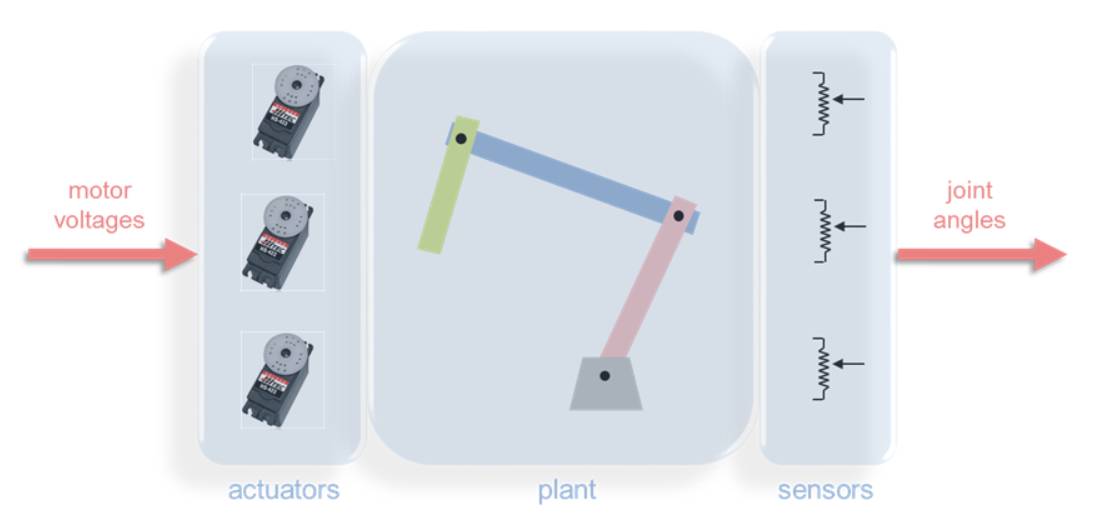
在機器人的本體模型完成后,可以通過Simulink以及相應(yīng)的控制工具箱進行電機控制算法的搭建、仿真和調(diào)優(yōu),形成閉環(huán)的機械、電子、控制一體化的閉環(huán)仿真。
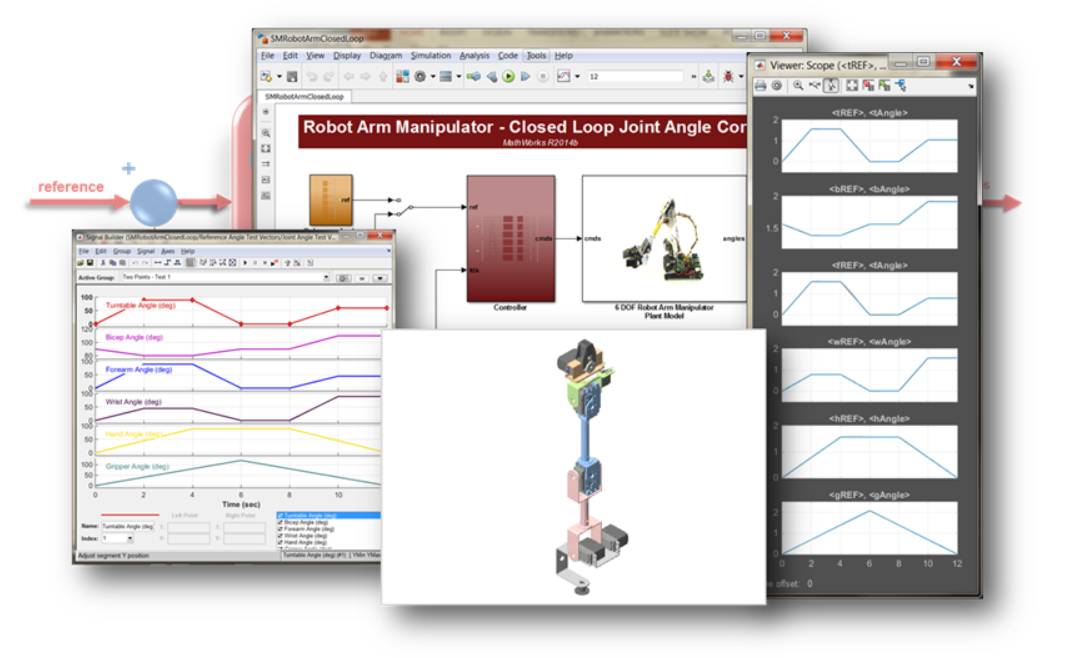
加入從運動軌跡規(guī)劃逆解到電機控制的角度位置的MATLAB程序,并集成至Simulink控制模塊中,就可以在仿真環(huán)境下完成運動學(xué)、電機控制在機械、電子、軟件一體化系統(tǒng)下的整體虛擬仿真調(diào)試。
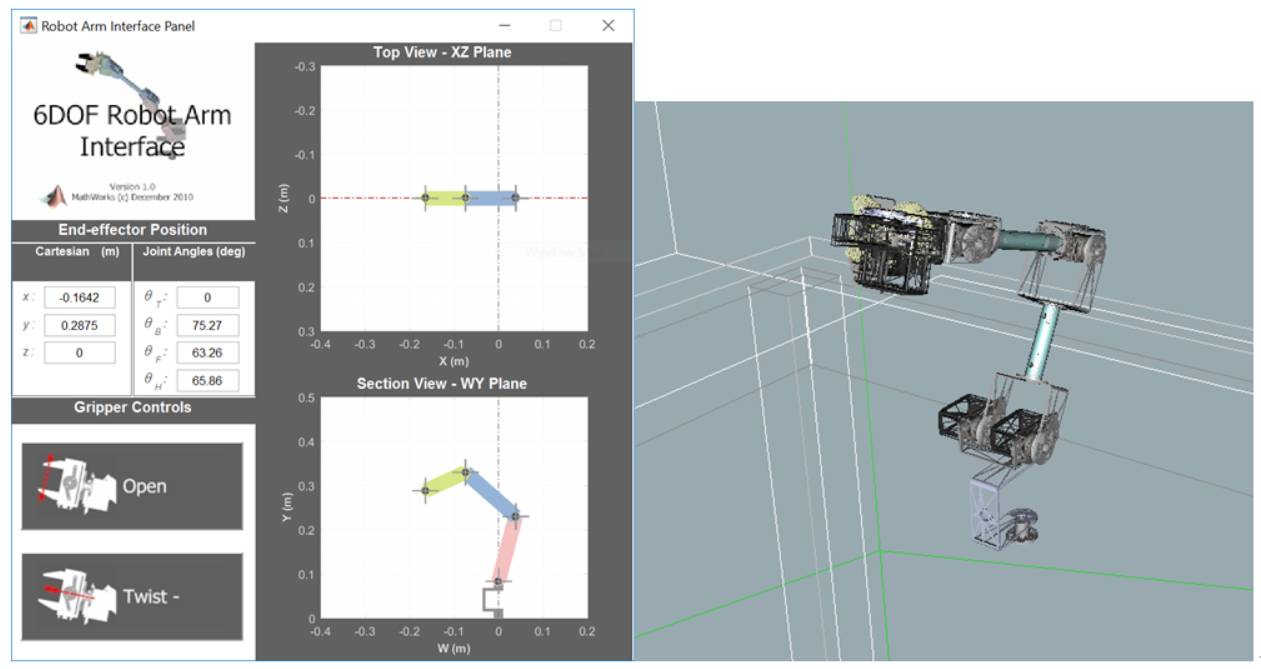
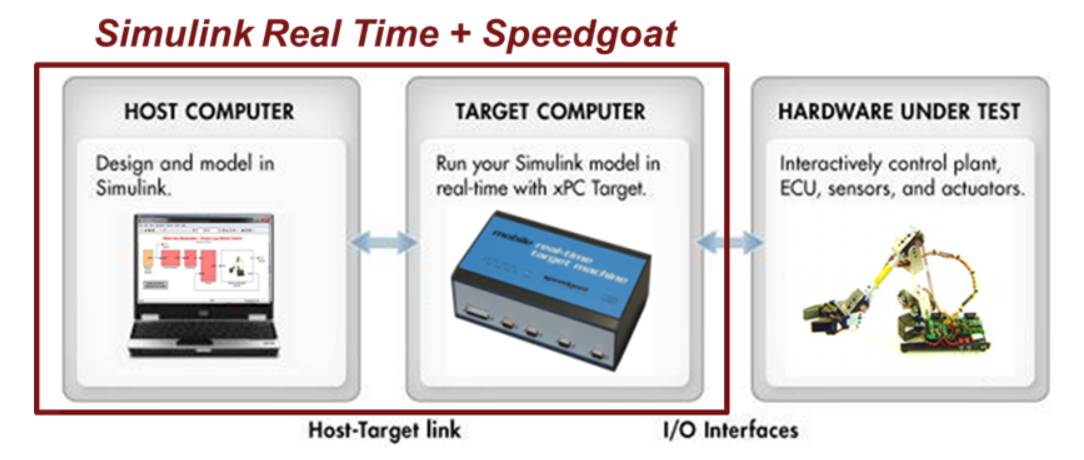
半實物仿真調(diào)試。在確認(rèn)所有控制部分準(zhǔn)確無誤后,可以通過Simulink Real Time將控制部分下載到HIL系統(tǒng)中(Hardware-In-the-Loop),通過高速實時總線連接到真實機器人,進行半實物仿真。
機器人算法早期原型驗證
現(xiàn)代機器人所涉及的算法多種多樣,可按如下領(lǐng)域劃分為:
感知和傳感器融合類算法
行走路徑算法類
機械臂規(guī)劃和控制算法類
MATLAB通過各種工具箱為這些算法提供了開發(fā)和驗證平臺。
感知和傳感器融合類算法
隨著機器人的更新?lián)Q代,越來越多的機器人有了人工智能(AI)的能力,人工智能相對于傳統(tǒng)機器人最主要增加了感知能力(例如攝像頭、雷達(dá)、激光雷達(dá))以及對多種傳感器識別輸出的融合能力。MATLAB在這方面主要提供如下工具箱:
Image Processing Toolbox
Signal Processing Toolbox
Computer Vision System Toolbox
值得一提的是,隨著AI的快速演進和發(fā)展,機器學(xué)習(xí)和深度學(xué)習(xí)已經(jīng)成為圖像處理方面的熱點。Statistics and Machine Learning Toolbox和Neural Network Toolbox適合于大規(guī)模圖像的機器學(xué)習(xí)和深度學(xué)習(xí)方面的訓(xùn)練和識別技術(shù)。
在傳感器融合方面,機器人技術(shù)和汽車自動駕駛有相同的技術(shù)背景和需求。在此背景之下,Automated Driving System Toolbox提供了多種傳感器融合所需要的編程框架和多種算法,以及各種融合的示例供參考。
行走路徑算法類
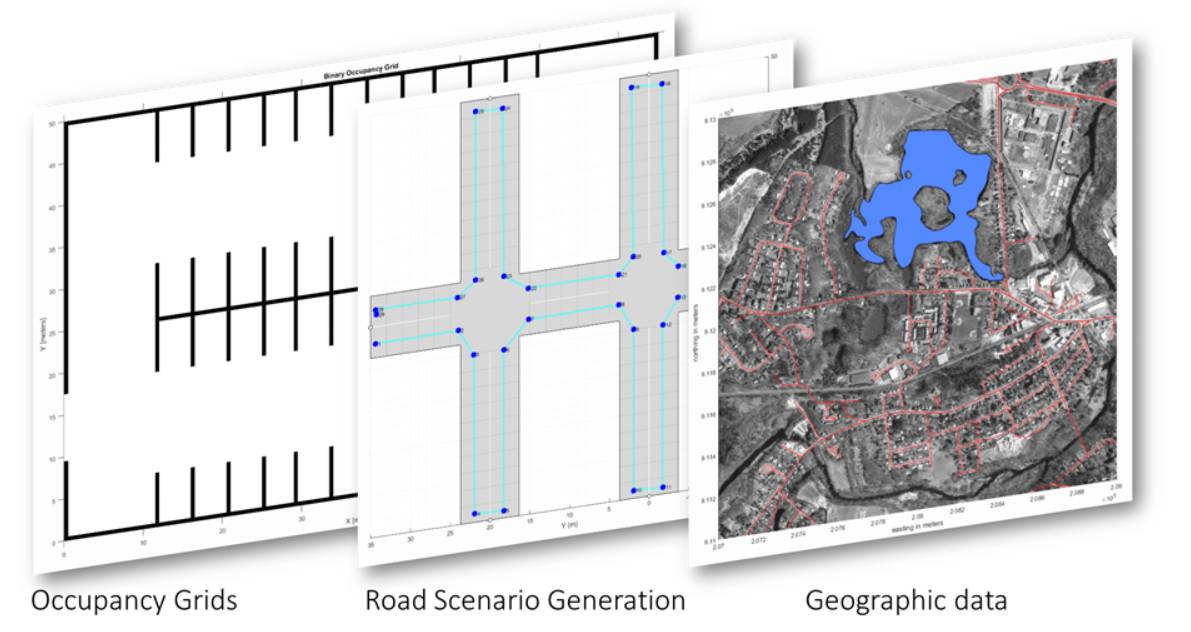
在行走機器人算法方面,MATLAB可以通過柵格(Occupancy Grids),道路模擬器,地理數(shù)據(jù)等方式來便利地表示地圖。
在路徑規(guī)劃和跟隨、自動避障、姿態(tài)和定位方面,Robotics SystemToolbox提供了內(nèi)置的PRM,Pure Pursuit,VFH,Monte CarloLocalization,Scan Matching等現(xiàn)成算法和功能供使用。也可以用MATLAB語言自己實行算法。
機械臂規(guī)劃和控制算法類
在機械臂機器人的規(guī)劃和控制算法中,常用的算法和功能包括:
Kinematics 和Inverse Kinematics
Kinematic Constraints
Dynamics 和Inverse Dynamics
Impedance Control
PID
Jacobian Transpose
Trajectory Planning and Optimization
ObstacleAvoidance
Robotics System Toolbox提供了機械臂的剛體樹(Rigid Body)表示,也提供了這些基本算法或樣例,可靈活地配合其他工具箱驗證這些算法。
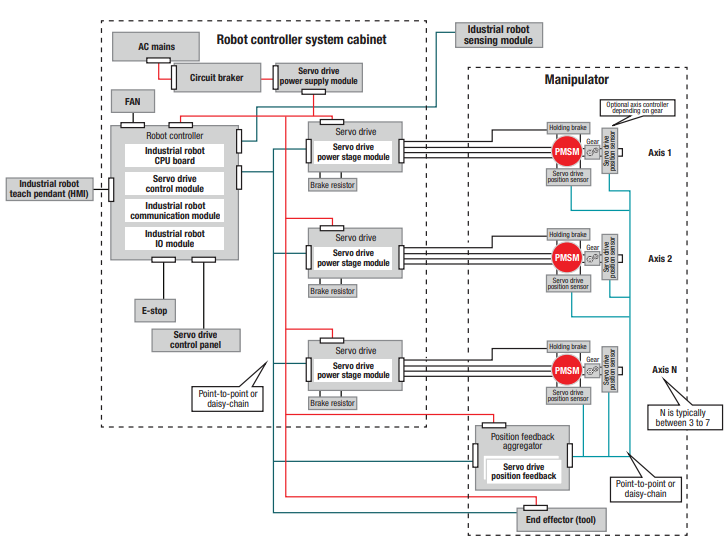
連接機器人平臺和外設(shè)
機器人作為一個生態(tài)系統(tǒng),圍繞這個機器人產(chǎn)業(yè),市面上出現(xiàn)了很多機器人仿真平臺:
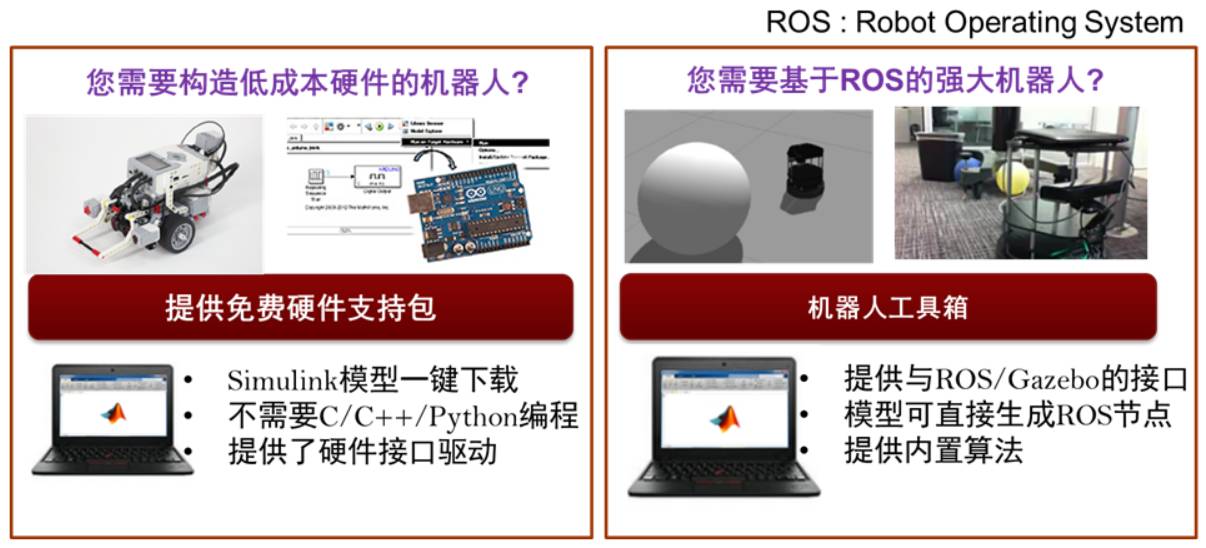
基于ROS(機器人操作系統(tǒng)):Gazebo, V-REP等
基于通用硬件的:Arduino,Raspberry Pi,LEGO MINDSTORMS等
MATLAB和Simulink提供了對ROS的支持。通過這些接口,用戶可以方便地通過ROS導(dǎo)入傳感器信息、測試機器人控制算法、也可以進行基于支持ROS的模擬器的虛擬仿真。
用戶還可以通過硬件支持包(Hardware Support Package)下載Arduino,Raspberry Pi,LEGO MINDSTORMS的支持包,用戶只需在MATLAB/Simulink中編寫控制算法就可很快地通過支持包生成代碼下載并運行在這些硬件平臺上。
代碼生成
在用戶通過控制算法的仿真和驗證之后,用戶可以通過Embedded Coder將Simulink算法直接生成標(biāo)準(zhǔn)C、C++代碼。
這些算法可以為:
電機控制算法
機器人運動控制算法
傳感器感知和融合算法
生成的C、C++代碼具有高度的可讀性和安全可靠性,可輕易適配至任何硬件或者操作系統(tǒng)。
德國宇航中心的Justin機器人是世界上最先進的機器人之一。Justin有兩個手臂,可移動,是一種人形機器人。開發(fā)團隊使用MATLAB和Simulink設(shè)計機器人模型,開發(fā)先進的控制算法和路徑規(guī)劃算法。
它的53個自由度分布在不同機械部分,上身:19自由度,手臂:26自由度,移動平臺:8自由度。它是通過其頭部的立體相機和RGB-D傳感器來感知外界環(huán)境,在所有的關(guān)節(jié)都有力矩傳感器,并在其手指有皮膚觸覺傳感器。
-
傳感器
+關(guān)注
關(guān)注
2576文章
55041瀏覽量
791383 -
機器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222282 -
模擬器
+關(guān)注
關(guān)注
2文章
1010瀏覽量
45683
發(fā)布評論請先 登錄
在 VisionFive 2 上實現(xiàn)機器人伺服控制
再談低溫?zé)Y(jié)銀的應(yīng)用:從春晚四家機器人出鏡的幕后推手說起
基于3D視覺引導(dǎo)的移動式復(fù)合機器人設(shè)計:智能自動化革命的核心技術(shù)

高精度機器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
未來工業(yè)AI發(fā)展的三個必然階段

移動機器人技術(shù)的發(fā)展歷程
哪些技術(shù)是智能物流倉儲系統(tǒng)的核心?

工業(yè)機器人的特點
高壓示波器探頭選擇前需明確的三大核心問題?
分享100+套機器人設(shè)計資料(文末可免費領(lǐng)取)

【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+ROS2應(yīng)用案例
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
工業(yè)機器人設(shè)計工程師必備指南免費下載



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論