") 關于汽車雷達探頭的分析和發(fā)展介紹
關于汽車雷達探頭的分析和發(fā)展介紹

自主駕駛當前引領全球,此趨勢將來定會加速發(fā)展。這一領域的關鍵技術(shù)是汽車雷達探頭,它是朝向更舒適駕駛、防撞,甚至是自動駕駛邁出的重要一步。駕駛員輔助系統(tǒng)已經(jīng)很普遍,這類系統(tǒng)在許多方面都由雷達支持。
今天的24 GHz、77 GHz和79 GHz汽車雷達探頭顯然需要能夠測量和分辨不同物體,同時在任何城市或鄉(xiāng)村環(huán)境都要能提供高距離分辨率、徑向速度分辨率和方位角分辨率。一個非常重要的特性是對來自其他汽車雷達探頭的干擾有良好抗擾性。由于目前市場對雷達探頭的接受程度不高,這個話題一直不太受關注。然而,迅速擴大和預期增長都在持續(xù)增加,高級駕駛員輔助系統(tǒng)(Advanced Driver Assistance Systems, ADAS) 市場預計每年增長高達10%。考慮到每年有7200萬輛新車注冊,按每輛車平均3個(或更多)汽車雷達探頭計算,未來每年大約有2億多個新的汽車雷達探頭行走在大街小巷。因此,24 GHz,以及76 GHz到81 GHz頻譜將被大量占用。汽車雷達探頭需要應對相互干擾,并且要提供信號分集和干擾抑制技術(shù)。涉及正在研發(fā)的自動汽車的偶發(fā)小事故已見諸報端。2016年5月,在涉及部分實現(xiàn)自動駕駛的汽車的第一起致命事故后,關于自動駕駛汽車安全性和這類技術(shù)安全性的問題再次被提起。因此,在存在相互干擾的任何環(huán)境下都必須確保探測設備功能不變。
本文介紹目前最先進的下一代汽車雷達信號和探頭的理論背景。文中解釋了相互干擾的影響,并提出了在具有各類典型干擾的任意射頻環(huán)境中,測試和驗證干擾抑制技術(shù)的測量可能性。這種方法可幫助研究和開發(fā)人員,設計出即使在惡劣射頻環(huán)境也能按技術(shù)指標可靠工作的汽車雷達探頭。
汽車雷達和法規(guī)
如果幾個汽車雷達探頭工作在頻段[1]中的相同部分,以及各自的工作頻率非常靠近時,可能相互干擾(參閱圖1)。可能的情況是人為虛假(ghost) 目標的建立或檢測概率的降低。虛假目標在現(xiàn)實中不存在,但對于雷達探頭卻作為真實目標出現(xiàn)。這可能由已發(fā)射信號的副本引起。該副本不是來自原始雷達發(fā)射機,但是落入接收機帶寬中,并作為真實回波信號被處理。只有在兩個或多個雷達之間的定時、波形和頻率必須匹配,并且回波信號功率必須超過一定限值時,才會發(fā)生這種情況。
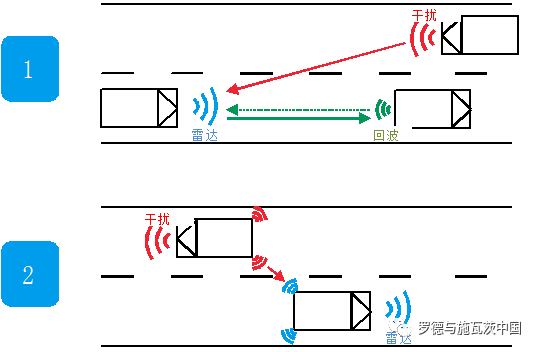
圖 1:干擾場景舉例
此外,落入接收機帶寬中具有一定功率電平的任意射頻信號,會增加雷達的本底噪聲并降低對目標的信噪比 (Signal To Noise, SNR)。這可能導致雷達截面積 (Radar Cross Section, RCS) 較小的目標消失,因為這些回波的信噪比減小。只有經(jīng)FFT信號處理后在所有頻率上擴散的信號必須落入接收機帶寬內(nèi)時,才會發(fā)生這種情況。
汽車雷達探頭的輸出功率由電子通信委員會 (Electronic Communications Committee , ECC) 規(guī)定。基于題為“指定77-81GHz頻段用于汽車短程雷達”的ECC決定 (04) 03,歐洲郵政和電信管理會議 (European Conference of Postal and Telecommunications Administrations, CEPT) 指定將79GHz頻率范圍,在無干擾且不采用保護措施的場景下用于短程雷達 (Short Range Radar, SRR) 設備。此外,定義了與峰值限值為55 dBm 有效全向輻射功率 (Equivalent Isotropic Radiated Power, EIRP)相關的-3dBm / MHz有效全向輻射功率的最大平均功率密度,并且由一個短程雷達設備運行產(chǎn)生的車輛外部最大平均功率密度不得超過-9 dBm / MHz有效全向輻射功率。工作在這些頻段中的所有標準汽車雷達探頭必須滿足這個決定。ETSI標準EN 301 091-1和EN 301 091-2 [7]已經(jīng)對77 GHz雷達的相關測試條件、功率發(fā)射和雜散輻射等幾個方面進行了標準化,但沒有提及任何關于干擾抑制的內(nèi)容。對于規(guī)定了79GHz頻段的ETSI標準EN 302 264-1和EN 302 264-2 [8]也是如此。
例如,在海事領域,導航雷達必須遵守國際電工委員會 (International Electrotechnical Commission, IEC) 標準IEC 62388 [2]。該標準規(guī)定了最基本的運行和性能要求、測試方法,以及按照無線電通信設備/系統(tǒng)性能標準要求的測試結(jié)果。IEC標準中一個非常重要方面是干擾抑制規(guī)范。然而,對于汽車雷達技術(shù)規(guī)范,類似導航雷達幾十年來經(jīng)歷的,沒有定義干擾抑制或性能的標準以及測試方法。
汽車雷達波形和干擾影響
如果干擾信號落入雷達接收機帶寬中,就此而言,它應當被檢測到并在信號處理過程中被抑制。每個制造商采用的波形、定時、帶寬、天線方向圖和信號處理方式通常略有不同。就干擾抑制而言這或許是個優(yōu)點,但也導致雷達對干擾的響應不同。
今天的汽車雷達探頭中主要使用兩種不同類型的波形。盲點檢測 (Blind Spot Detection, BSD) 雷達經(jīng)常使用多進制頻移鍵控 (Multi-Frequency Shift Keying, MFSK) 雷達信號,并且主要工作在24GHz頻段。工作在77 GHz或79 GHz頻段的雷達經(jīng)常使用線性調(diào)頻連續(xù)波 (Linear Frequency Modulated Continuous Wave, LFMCW) 信號或線性調(diào)頻序列 (Chirp Sequence, CS) 信號,后者是一種特殊形式的LFMCW信號。
使用LFMCW,雷達在一定時間內(nèi)(稱為相干處理間隔 TcpI)發(fā)射具有特定帶寬 fsweep的調(diào)頻信號(線性調(diào)頻),如圖2所示。
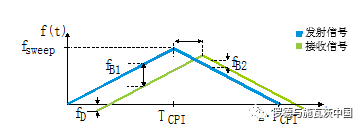
圖2:采用上行線性調(diào)頻和下行線性調(diào)頻的LFMCW雷達
雷達用瞬時發(fā)射頻率下變頻接收的信號,并測量差頻fB,fB描述與原始發(fā)射波形的偏移。兩個雷達參數(shù),范圍R和徑向速度Vr,都與測量的差頻fB相關。為了無模糊地求解目標Vr和R,必須進行兩次差頻測量(如圖2所示),其中兩個差頻分別表示為fB1和fB2 。在多目標情況,用不同差頻的兩組連續(xù)線性調(diào)頻信號,不能無模糊地求解距離和徑向速度。這可以通過使用額外的具有不同斜率的線性調(diào)頻信號來解決。
為了實現(xiàn)一定的徑向速度分辨率,TcpI通常在20ms范圍內(nèi),并且單次處理間隔內(nèi)線性調(diào)頻數(shù)目大于2。fsweep決定了距離分辨率, fsweep在幾百MHz間變化,在不久的將來其變化范圍可達1GHz以上,在未來可能是4 GHz甚至5 GHz。
另一種波形稱為線性調(diào)頻序列(CS),它由幾個非常短的LFMCW線性調(diào)頻連續(xù)波組成,每個線性調(diào)頻持續(xù)時間為Tchirp ,采用塊長度TcpI 發(fā)射(參閱圖3)。由于單個線性調(diào)頻非常短,所以差頻fB主要受信號傳播時間影響,并且多普勒頻移fD可以忽略不計。
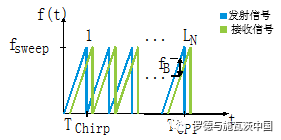
圖3:線性調(diào)頻序列
在經(jīng)過用瞬時載波頻率初始下變頻和對每個線性調(diào)頻實施傅立葉變換后,信號處理便開始了。由于高載波頻率和高線性調(diào)頻率,差頻主要由距離決定。計算目標距離R時,假定徑向速度Vr =u/s在單個線性調(diào)頻期間不測量徑向速度,而是在持續(xù)時間為TcpI的連續(xù)線性調(diào)頻塊上測量。沿時間軸執(zhí)行第二次傅立葉變換,得到多普勒頻移fD。 在獲得多普勒頻移之后,便可校正目標距離。
雖然單個Tchirp通常在10μs到100μs范圍內(nèi),但是信號LN的數(shù)量應當高到使得整個相干處理間隔TcpI=LNTchirp再次在幾十毫秒的范圍內(nèi),以實現(xiàn)期望的徑向速度分辨率。
信號帶寬大,與之相比接收機帶寬非常小。由于事實上僅測量雷達設計的最大差頻,這是可以實現(xiàn)的。為了給出兩個示例,表1顯示了當目標徑向速度為50m / s、距離在40米范圍內(nèi)時,采用兩種汽車雷達波形的差頻。
這些計算依據(jù)LFMCW方程,并且顯示LFMCW的差頻在幾百kHz范圍內(nèi),但CS雷達(幾MHz)的差頻顯然高得多。這導致接收機帶寬更大,并且與使用LFMCW時所用的技術(shù)相比可能需要不同的干擾抑制技術(shù)。
表 1:使用LFMCW 和CS信號的 77 GHz 雷達,以及目標采用50m/s徑向速度且距離在40米范圍內(nèi)的預期差頻。
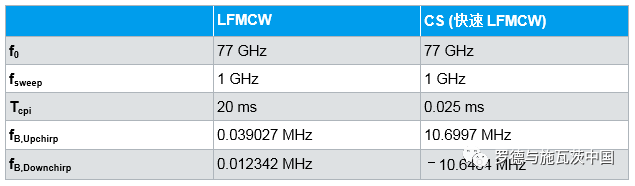
與LFMCW相比,CS的優(yōu)點是無模糊和提高了更新速率,因為單個相干處理間隔 (TcpI) 足以測量和分辨觀察范圍內(nèi)的所有目標。在LFMCW中,至少需要3種不同的線性調(diào)頻信號。另一方面,在CS波形中,由于多次FFTs和接收機帶寬要根據(jù)預期的差頻而縮放,處理復雜度增加,這就是需要干擾抑制和干擾緩解技術(shù)的原因。
圖4描述了當存在干擾信號(紅色線性調(diào)頻)時的下變頻和傅里葉變換過程。干擾線性調(diào)頻與物體的雷達回波一起下變頻。綠色表示某個范圍的恒定差頻,它會在無干擾環(huán)境中測量單個目標時產(chǎn)生。隨著干擾信號的引入,產(chǎn)生與時間相關的差頻(紅色曲線),伴隨著期望的回波信號。因此,在傅里葉域中,頻譜不僅顯示單個差頻,而且顯示若干頻率。在最優(yōu)解中,回波信號(綠色條)的信噪比最大。當存在干擾信號時,本底噪聲上升,并且信噪比隨接收機帶寬fLP 的增大而減小,如圖所示。除了檢測概率降低外,回波信號的較低信噪比也會導致距離和多普勒頻移測量的精度降低。
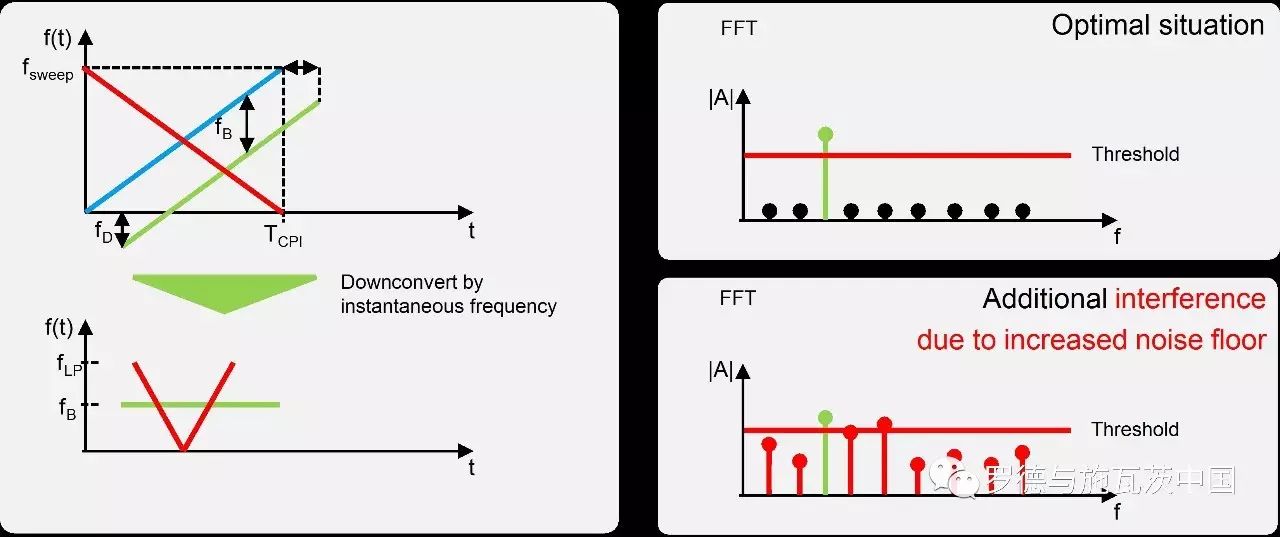
圖 4:干擾信號影響
接收機本底噪聲和物體對應的信噪比取決于硬件、軟件和物體的雷達截面積。對于工作在77 GHz的汽車雷達,典型的本底噪聲電平約為-90 dBm。一種趨勢是將線性調(diào)頻序列波形與諸如頻移鍵控等其它方法組合,以便減少計算量。然而,截至今天,對于汽車雷達探頭,還沒有標準給出規(guī)范性的干擾和干擾抑制的通用定義。
干擾抑制測試和測量
為了驗證抗干擾方法的性能和測試雷達探頭的干擾魯棒性,需要在能夠生成任意射頻信號的實驗室中搭建測量環(huán)境。例如,這些信號甚至可以包括發(fā)射機位置、天線移動和天線方向圖。
圖5顯示來自羅德與施瓦茨公司的脈沖序列發(fā)生器軟件生成的典型雷達干擾信號,諸如線性調(diào)頻連續(xù)波(LFMCW)、頻移鍵控(Frequency Shift Keying, FSK)和線性調(diào)頻序列(CS)。應當提及的是,該軟件不限于生成這些信號或序列,它還可以為實驗室建立復雜的射頻環(huán)境[3]。
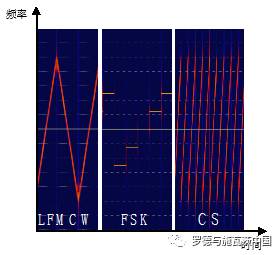
圖5:典型連續(xù)波雷達信號
雖然這些信號可以在基帶產(chǎn)生,但將這些信號上變頻到E-band是個挑戰(zhàn)。由于大多數(shù)汽車雷達只使用調(diào)頻信號,一種方法是使用先進的矢量信號發(fā)生器結(jié)合倍頻器。這樣配置的優(yōu)點是測試裝置不太復雜并且可以較容易實現(xiàn)大信號帶寬,因為倍頻器也能縮放信號帶寬[5]。在基帶中設計波形時,可以輕松考慮縮放因子。
圖6為汽車雷達探頭的典型測試裝置,使用矢量信號發(fā)生器(如R&S SMW200A)結(jié)合倍頻器(如R&S SMZ90)。用脈沖序列發(fā)生器軟件產(chǎn)生任意射頻環(huán)境,其中信號通過本地網(wǎng)絡或通過U盤傳輸?shù)绞噶啃盘柊l(fā)生器。將R&S SMW200A生成的12.6 GHz到13.5 GHz射頻信號乘以6。E-band喇叭天線可以連接到倍頻器的輸出,然后經(jīng)空中朝被測設備(Device Under Test, DUT)發(fā)射E-band信號。在該裝置中,矢量信號發(fā)生器使用的帶寬也放大了6倍。為了生成具有5GHz信號帶寬的雷達線性調(diào)頻脈沖,需要833.3MHz的基帶帶寬(833.3MHz×6 = 5GHz)。在下圖所示的裝置中,使用2 GHz基帶帶寬,可以實現(xiàn)高達12 GHz(2 GHz x 6 = 12 GHz)的射頻信號帶寬。
圖6:用于汽車雷達探頭的干擾測試裝置
干擾信號的頻譜如下圖所示。可以觀察信號的頻譜以及上行線性調(diào)頻和下行線性調(diào)頻組成的LFMCW信號波形。所有線性調(diào)頻信號的參數(shù)都使用信號分析儀直接分析,例如使用配備R&S FSW-K60瞬態(tài)分析軟件的R&S FSW85。線性調(diào)頻信號長度為1 ms,信號頻率的線性度在幾kHz范圍內(nèi),這與汽車雷達信號相當。
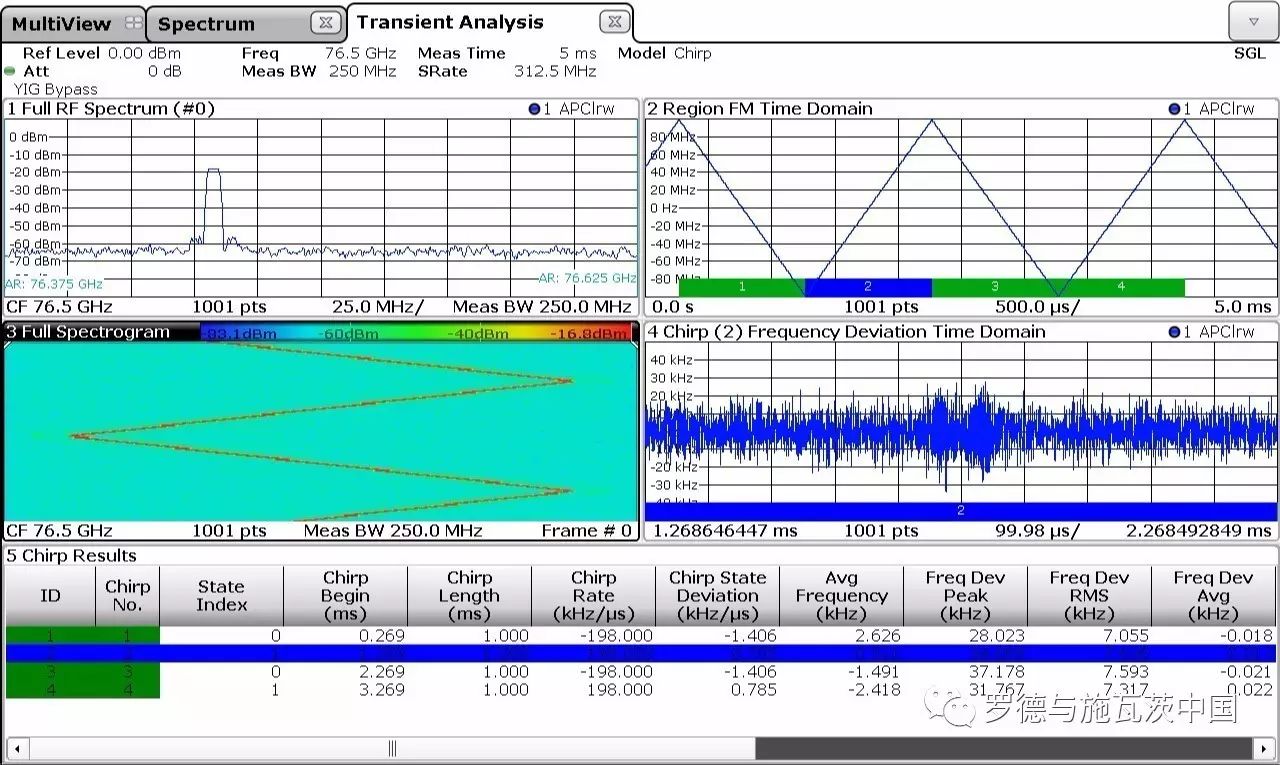
圖 7:用R&S SMW200A 結(jié)合R&S SMZ90倍頻器生成的雷達干擾信號
研究人員已經(jīng)研究在汽車雷達中使用如OFDM這樣的通信信號[4],以及設計干擾抑制算法[6]。然而,在對價格敏感的探頭中實時處理這些超寬帶OFDM信號可能很復雜。這使得在不久的將來應用OFDM信號前景不明。這也是為什么從毫米波范圍開始驗證干擾抑制算法、波形和整個處理鏈是如此重要的原因之一。
不僅是性價比,實時處理寬頻帶OFDM信號的挑戰(zhàn)性,在毫米波中生成幅度調(diào)制干擾信號也需要更復雜的裝置。圖8描述了一種方法,雙射頻通道矢量信號發(fā)生器分別生成中頻 (IF) 信號和本振 (LO) 信號。將本振信號頻率擴大6倍,并將中頻信號搬移到76GHz至81GHz。具有內(nèi)部寬帶基帶源的矢量信號發(fā)生器,可在E-band中生成任意調(diào)制、帶寬高達2GHz的射頻信號。使用已校準的內(nèi)部寬帶基帶硬件的矢量信號發(fā)生器(如R&S SMW200A)與使用多臺儀器的其他解決方案相比具有很大優(yōu)勢,因為它不需要校準,也不需要補償I / Q調(diào)制器的頻率響應。

圖 8:使用混頻器的汽車雷達探頭干擾測試裝置
測量結(jié)果
為了驗證有附加雷達信號時產(chǎn)生的影響,使用最先進的77GHz雷達探頭。這種探頭的優(yōu)點是在距離域中中頻和FFT原始數(shù)據(jù)的可用性,從而可以立即驗證干擾信號對FFT頻譜的影響。如所解釋的,應該看到基底噪聲的增加,這取決于有多少干擾信號功率被下變頻并落入接收機帶寬中。在這些測量中,探頭被配置為發(fā)射具有200 MHz信號帶寬的LFMCW信號,如圖9所示,其中瞬態(tài)分析選件顯示了持續(xù)時間、信號帶寬、發(fā)射的線性調(diào)頻的線性度(頻率偏移在時域的變化)和射頻頻譜中的雜散干擾。
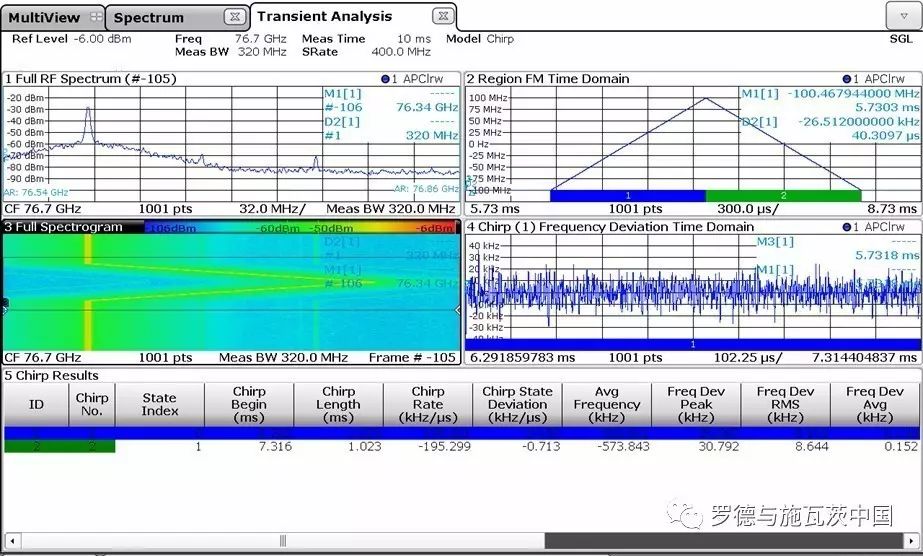
圖 9:用R&S FSW-K60瞬態(tài)分析選件分析雷達探頭
脈沖序列發(fā)生器軟件用于模擬波形,以及借助額外的干擾波形測試雷達。采用實時頻譜儀的全息頻譜模式便可以檢驗這兩個信號。圖10給出兩個射頻信號,即由雷達探頭發(fā)射的線性調(diào)頻和由矢量信號發(fā)生器生成的干擾信號。當雷達探頭發(fā)射上行線性調(diào)頻和下行線性調(diào)頻,接著是未調(diào)制的連續(xù)波信號時,干擾信號僅發(fā)射上行線性調(diào)頻和下行線性調(diào)頻信號。干擾線性調(diào)頻信號的功率電平比發(fā)射的雷達信號小約5 dB,如全息頻譜中所示。
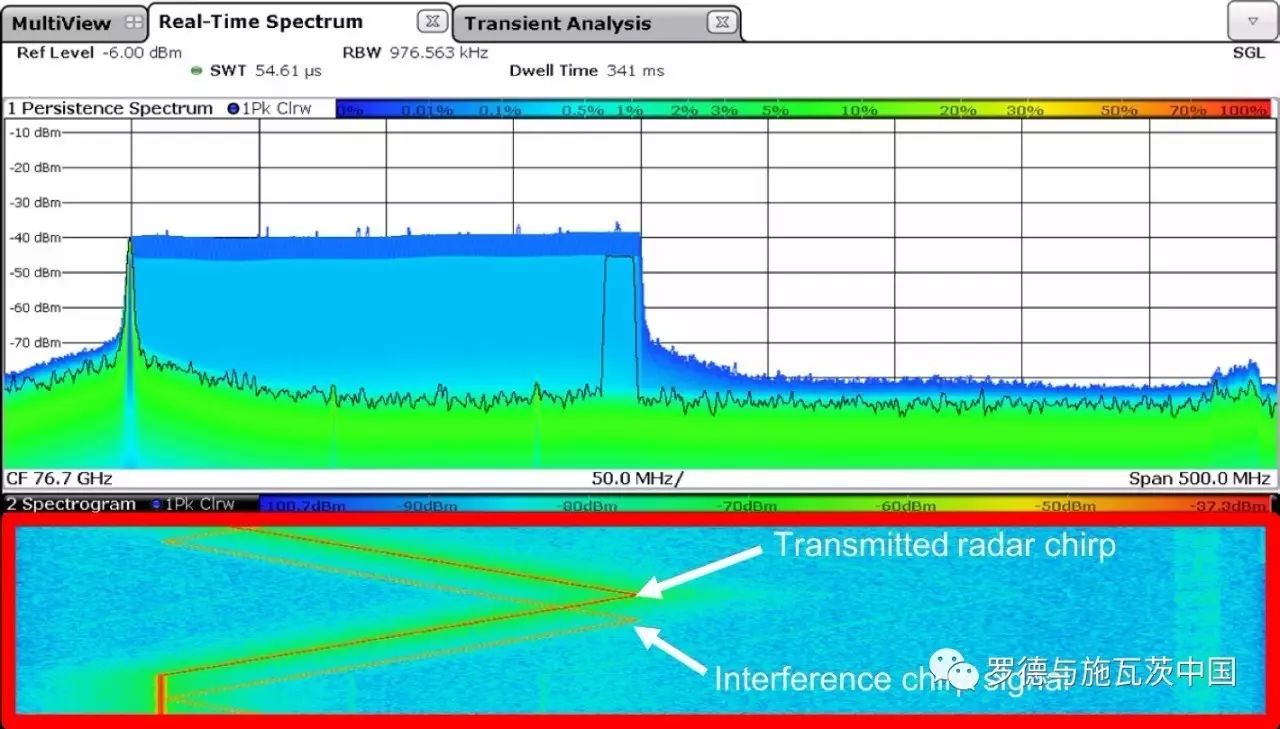
圖 10:實時頻譜中的結(jié)果: 有用信號(左側(cè)的單個線性調(diào)頻)和連續(xù)的線性調(diào)頻干擾
圖11給出了頻譜測量樣本,其中將有和沒有干擾信號情況下該范圍上的幅度電平繪出。當測量進入無干擾的自由空間時,這個雷達探頭測量到功率電平在-115 dBm上下的頻譜,和在相鄰范圍內(nèi)的一些雷達回波信號。
當存在干擾信號時,取決于干擾信號自身情況,本底噪聲增加到約-102 dBm和-90 dBm。應當提及的是,該雷達探頭沒有采用任何干擾消除。此外,正如我們在上述測量中看到的,本底噪聲的增加明顯地取決于干擾信號電平和干擾波形本身。已經(jīng)證明,10dB到25dB的信噪比降低,可能在跟蹤期間非常容易地丟失目標,或者具有低雷達截面積(RCS)的目標,例如行人,不能被檢測到。
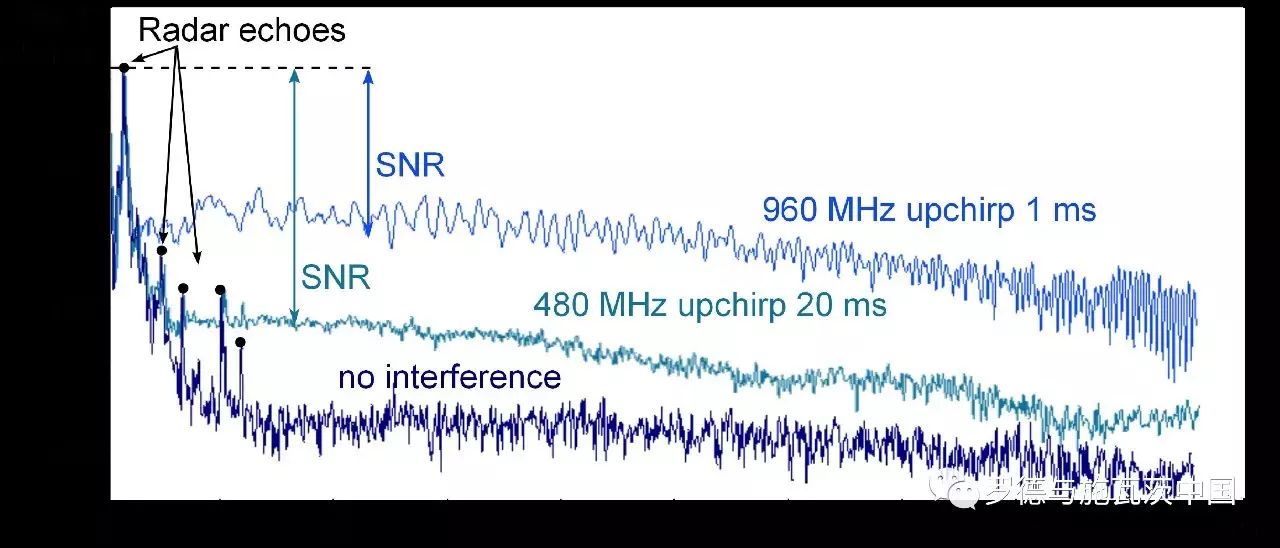
圖 11:被測雷達探頭測得的功率譜
總結(jié)
汽車雷達支持追求額外的駕駛舒適性、安全性甚至自動駕駛的趨勢。在街道上穿梭的汽車雷達探頭數(shù)量正在迅速增加,并將在未來幾年進一步增長。因此,在24 GHz、77 GHz和79 GHz頻帶中分配的頻譜要由不同類型的探頭和信號共享。作為保證安全性的關鍵元件,雷達探頭需要克服相互干擾,提供信號分集和干擾抑制技術(shù),以便測量、檢測、分辨和分類雷達回波信號,即使在高密度占用的頻譜中。例如,現(xiàn)在有針對導航雷達的關于干擾測試和抑制的規(guī)范和標準,但對于汽車雷達還沒有要求。
為了滿足這些需求,本文介紹了最先進的下一代汽車雷達的理論背景和干擾對其造成的影響。對于驗證任意射頻環(huán)境中的干擾抑制技術(shù),提出了測試和測量的可能性。使用最先進的商用77 GHz雷達探頭驗證了干擾的影響。這些測試裝置應該可以幫助研究人員和開發(fā)人員,按照技術(shù)規(guī)范,即使在惡劣的射頻環(huán)境下也能確保他們雷達的功能。
-
發(fā)生器
+關注
關注
4文章
1429瀏覽量
64598 -
雷達
+關注
關注
52文章
3328瀏覽量
123929 -
調(diào)制器
+關注
關注
3文章
975瀏覽量
48518
發(fā)布評論請先 登錄
光隔離探頭在新能源汽車電驅(qū)系統(tǒng)高壓安全與精準診斷中的應用
示波器探頭精準診斷:動態(tài)波形分析法判定芯片工作狀態(tài)
無源探頭與高壓探頭技術(shù)對比分析
禾賽科技與理想汽車續(xù)簽激光雷達合作
??示波器探頭的正確選擇與使用指南?
??光隔離探頭與高壓差分探頭的技術(shù)特性分析與替代性研究??
探頭的延時介紹
柔性電流探頭介紹

高壓差分探頭與光電隔離探頭的電氣隔離特性對比分析

選對探頭事半功倍:1G有源探頭vs1G無源探頭實測分析

激光雷達技術(shù)在自動駕駛汽車中的應用

是德科技解析光隔離探頭構(gòu)造與特性 光隔離探頭的典型測試案例

激光雷達技術(shù):自動駕駛的應用與發(fā)展趨勢




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論