 電子發燒友App
電子發燒友App












 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
濾波可能是任何嵌入式工程師必須設計的最常見的 DSP 算法,無論他們是為 STM32、TI DSP 還是為 FPGA 開發的算法。濾波非常重要,因為大多數應用程序都連接到現實世界,因此它們需要捕獲具有所有真實信號都具有的不良元素的真實信號,即噪聲、偏移……此外,我們需要獲取的信號,并非總是如此將是我們獲取的主要信號,例如,對于生物信號,我們將獲取與電網頻率相對應的 50 或 60 Hz 的高電平。在這種情況下,我們將需要一個過濾器。
作為本博客的讀者,您肯定知道,在數字系統上,我們有 2 種濾波器,FIR(有限脈沖響應)濾波器,它只使用現在輸入的值和過去的值,以及 IIR(無限脈沖Response),它使用現在和過去的輸入值,以及過去輸出的值。FIR 濾波器很容易為許多應用設計,但它們的響應對于低階濾波器是有限的。另一方面,使用 IIR 濾波器,我們可以實現更積極的響應,但它們的缺點是濾波器在某些情況下可能不穩定。在本文中,我們將了解如何逐步實現二階濾波器,從濾波器設計到 Verilog 實現。
設計 IIR 濾波器的過程始終相同。首先我們要使用它的連續傳遞函數來設計濾波器,然后,一旦選擇了濾波器的固有頻率、階數和品質因數,我們將得到相應的 s
功能。為了將該濾波器數字化,下一步是應用一些變換來用 z 替換變量s ,這個過程稱為離散化。為了離散化連續傳遞函數,我們可以使用多種方法,其中一種易于使用的方法是Tustin或雙線性變換。
雙線性變換基于將連續傳遞函數中的s變量替換為z的函數。在下一個示例中,我們可以看到應用雙線性變換對單極點低通濾波器進行離散化。接下來是我們必須在連續傳遞函數中執行的替換。
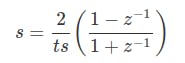
對于單極點濾波器,這些將是執行雙線性變換的步驟。低通單極濾波器的方程如下:
應用轉換,我們有:
與分母運算以獲得共同的分母,

然后,我們需要將元素與其他元素中的z分開,最后我們將得到一個z函數,該函數取決于濾波器的采樣頻率和固有頻率。
在 MATLAB 中,我們可以使用以下命令進行此轉換hz = c2d(hs,ts,'Tustin')
接下來是 100 Hz 低通濾波器的整個 MATLAB 代碼。
%% single pole filter discretization
% continuos filter declaration
s = tf('s');
% define characteristics of the filter
fc = 100;
% compute angular frequency
wc = 2*pi*fc;
% Write the transfer function of a low pass single pole filter
hs = 1/(1+s/wc);
% show its bode diagram
bode(hs)
% discretization using tustin method
% Sampling frequency
fs = 100e3;
ts = 1/fs;
hz = c2d(hs,ts,'Tustin')
赫茲的結果是
hz =
0.003132 z + 0.003132
---------------------
z - 0.9937
Sample time: 1e-05 seconds
Discrete-time transfer function.
為了驗證我們手動獲得的方程是否正確,我們必須使用我們之前獲得的值創建一個傳遞函數。
hz_man = tf([ts*wc, ts*wc],[ts*wc+2 ts*wc-2], ts)
這種情況下的結果是
hz_man =
0.006283 z + 0.006283
---------------------
2.006 z - 1.994
Sample time: 1e-05 seconds
Discrete-time transfer function.
我們可以看到,將分子和分母除以 2.006,方程與使用c2c命令得到的方程相同。
雙線性變換與其他任何離散化方法一樣,都是一種近似,因此我們將引入一些誤差。該誤差的大小與采樣頻率有關,因為在某些情況下,非常(非常)高的采樣頻率可能看起來是連續的。在實際系統中,采樣頻率取決于 ADC 和許多實際組件,我們可以使用高采樣頻率,但在其他情況下,我們會引入顯著誤差。
在雙線性變換的情況下,我們將引入的誤差之一是頻率扭曲。這種效應會產生濾波器固有頻率的偏移。這種影響在低通濾波器的情況下可以忽略不計,但在窄帶濾波器的情況下,該誤差可能使濾波器不起作用。
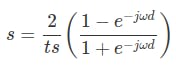
為了找到由雙線性變換引起的誤差,我們需要找到模擬頻率與離散頻率之間的關系。首先,我們將從雙線性變換方程開始。
將z替換為其極坐標形式e^(jωd) ,我們有
現在,我們將使用半角分割指數。

將分子和分母替換為上述等式,我們有:

現在,我們將使用半角分割指數。

將分子和分母替換為上述等式,我們有:

然后,我們必須找到與類比的關系,所以我們要使兩個方程相等
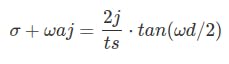
我們可以驗證實部為 0,而虛部wwa直接為
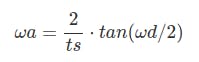
請注意,當ts趨于零時,極限是ωa = ωd。
在 MATLAB 中,我們可以很容易地檢查這個偏差。在這種情況下,我們將聲明一個二階連續帶阻濾波器。然后使用 Tustin 方法對濾波器進行離散化。
close all
clear all
clc
% define filter
fc = 3000;
wn = 2*pi*fc;
q = 5;%1/sqrt(2); % butterworth
s = tf('s');
h = (s^2+wn^2)/(s^2+wn/q*s+wn^2)
%bode(h)
% discretize filter
fs = 100e6/2048 % prescale FPGA frequency by factor of 2048
ts = 1/fs;
hz = c2d(h,ts,'tustin');
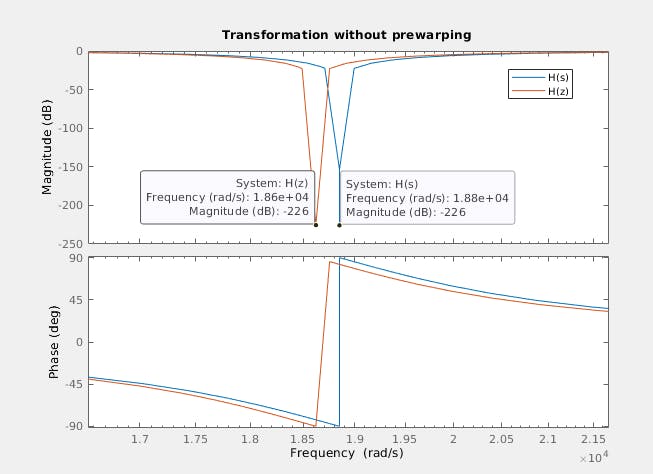
我們可以看到數字濾波器的頻率是如何移動的。然后我們將對自然頻率應用預變形,并使用這個新頻率重新離散化濾波器。
% calculate prewarping
wp = 2/ts*tan(wc*ts/2);
hw = (s^2+wp^2)/(s^2+wp/q*s+wp^2)
hwz = c2d(hw,ts,'tustin');
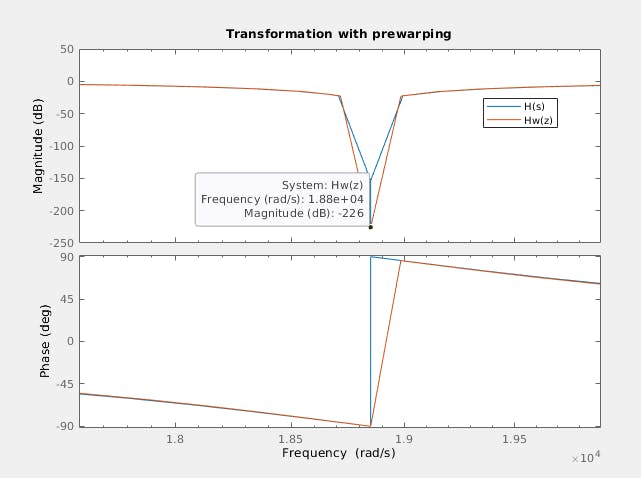
我們可以看到在這種情況下,兩個頻率是相同的,所以誤差是固定的。
為了在現實世界中驗證這種行為,我們將在 Verilog 中實現這個二階帶阻濾波器,然后我們將檢查扭曲錯誤,然后如何使用預扭曲來修復它。
在開始編碼之前,我們必須考慮我們想要創建的模塊是什么。在我的情況下,能夠參數化模塊是非常重要的,這樣,如果我改變輸入的寬度,或者輸出的寬度,那只代表一個參數的改變,而不需要修改模塊的代碼因為這意味著模塊的新測試。此外,我們必須考慮我們將使用什么數字格式。對于這種過濾器,很明顯我們需要有符號格式,以及管理十進制數的能力. 為了達到這個要求,我們必須在定點和浮點之間進行選擇,對我來說決定很明確,我想要一個可以單獨實例化的代碼,沒有外部浮點單元,所以格式將是定點的。如果我們加上參數的要求,和定點格式,我們需要參數來定義信號的寬度,還有小數部分的寬度,這與我們需要的精度有關。此外,將選擇精度以獲得與設計盡可能相似的實施濾波器的響應。現在,我們需要參數化多少寬度?我們可以定義一個寬度,用于輸入和輸出以及系數,但是這樣,系數的寬度將根據數據生成器的寬度來選擇,對于某些過濾器,系數在穩定極限上,這可能代表一個問題。因此,至少我們將定義 2 種不同的寬度,一種用于輸入和輸出,根據數據消耗和數據源,另一種根據我們需要的分辨率。另一個我們要考慮寬度的事情,是內部運算的分辨率,因為在某些情況下,穩定性問題與系數本身的寬度無關,而是運算分辨率,所以在這一點上,將是有趣的解耦將在 MATLAB 或 Python 上生成的系數的寬度,以及內部濾波器操作的寬度。最后,過濾器參數將如下所示。一個用于輸入和輸出,根據數據消耗和數據源,另一個根據我們需要的分辨率。另一個我們要考慮寬度的事情,是內部運算的分辨率,因為在某些情況下,穩定性問題與系數本身的寬度無關,而是運算分辨率,所以在這一點上,將是有趣的解耦將在 MATLAB 或 Python 上生成的系數的寬度,以及內部濾波器操作的寬度。最后,過濾器參數將如下所示。一個用于輸入和輸出,根據數據消耗和數據源,另一個根據我們需要的分辨率。另一個我們要考慮寬度的事情,是內部運算的分辨率,因為在某些情況下,穩定性問題與系數本身的寬度無關,而是運算分辨率,所以在這一點上,將是有趣的解耦將在 MATLAB 或 Python 上生成的系數的寬度,以及內部濾波器操作的寬度。最后,過濾器參數將如下所示。穩定性問題與系數本身的寬度無關,而與運算分辨率有關,因此在這一點上,將在 MATLAB 或 Python 上生成的系數的寬度與內部濾波器操作的寬度解耦會很有趣. 最后,過濾器參數將如下所示。穩定性問題與系數本身的寬度無關,而與運算分辨率有關,因此在這一點上,將在 MATLAB 或 Python 上生成的系數的寬度與內部濾波器操作的寬度解耦會很有趣. 最后,過濾器參數將如下所示。
parameter inout_width = 16,
parameter inout_decimal_width = 15,
parameter coefficient_width = 16,
parameter coefficient_decimal_width = 15,
parameter internal_width = 16,
parameter internal_decimal_width = 15
接下來我們必須考慮接口。在模塊之間以連續方式傳輸數據的應用中,AXI4-Stream 將是最佳選擇。在輸入和輸出字段中,我們將定義主從 AXI4-Stream 接口來獲取和發送數據。盡管輸入和輸出寬度是參數化的,但如果我們想將模塊連接到現有的 AXI4-Stream IP,則此寬度受限于總線的寬度。
input aclk,
input resetn,
/* slave axis interface */
input [inout_width-1:0] s_axis_tdata,
input s_axis_tlast,
input s_axis_tvalid,
output s_axis_tready,
/* master axis interface */
output reg [inout_width-1:0] m_axis_tdata,
output reg m_axis_tlast,
output reg m_axis_tvalid,
input m_axis_tready,
關于系數,插入它們最好是使用 AXI4-Lite 接口,但我想設計這個模塊而不需要使用 Zynq 或 Microblaze,所以插入系數的簡單方法是作為輸入。
/* coefficients */
input signed [pw_coefficient_width-1:0] b0,
input signed [pw_coefficient_width-1:0] b1,
input signed [pw_coefficient_width-1:0] b2,
input signed [pw_coefficient_width-1:0] a1,
input signed [pw_coefficient_width-1:0] a2
現在,在定義了所有輸入和輸出之后,我們必須考慮數據流。首先,由于我們定義了不同的格式,為了能夠在系數和數據之間進行運算,我們必須將所有信號的格式更改為內部格式,內部格式由內部寬度和小數寬度定義。使用的整數寬度被定義為一個localparam,并且對應于寬度和小數寬度之間的差異。要更改格式,我們將在信號的低端填充零,直到完成小數部分。對于整數部分,由于使用的格式是有符號的,我們必須進行符號擴展,即填充 MSb 的值,直到整數部分完成。請注意,這是有效的,因為內部寬度大于或等于輸入輸出和系數寬度。
/* resize signals to internal width */
assign input_int = { {(internal_integer_width-inout_integer_width){s_axis_tdata[inout_width-1]}},
s_axis_tdata,
{(internal_decimal_width-inout_decimal_width){1'b0}} };
assign b0_int = { {(internal_integer_width-coefficient_integer_width){b0[coefficient_width-1]}},
b0,
{(internal_decimal_width-coefficient_decimal_width){1'b0}} };
assign b1_int = { {(internal_integer_width-coefficient_integer_width){b1[coefficient_width-1]}},
b1,
{(internal_decimal_width-coefficient_decimal_width){1'b0}} };
assign b2_int = { {(internal_integer_width-coefficient_integer_width){b2[coefficient_width-1]}},
b2,
{(internal_decimal_width-coefficient_decimal_width){1'b0}} };
assign a1_int = { {(internal_integer_width-coefficient_integer_width){a1[coefficient_width-1]}},
a1,
{(internal_decimal_width-coefficient_decimal_width){1'b0}} };
assign a2_int = { {(internal_integer_width-coefficient_integer_width){a2[coefficient_width-1]}},
a2,
{(internal_decimal_width-coefficient_decimal_width){1'b0}} };
數字濾波器,無論是 FIR 還是 IIR,都需要存儲過去輸入的值,而 IIR 還需要存儲過去輸出的值,因此我們需要一個流水線結構來存儲過去的值。
/* pipeline registers */
always @(posedge aclk)
if (!resetn) begin
input_pipe1 <= 0;
input_pipe2 <= 0;
output_pipe1 <= 0;
output_pipe2 <= 0;
end
else
if (s_axis_tvalid) begin
input_pipe1 <= input_int;
input_pipe2 <= input_pipe1;
output_pipe1 <= output_int;
output_pipe2 <= output_pipe1;
end
現在,接下來是執行過濾器計算。一個二階濾波器需要執行 5 次乘法,記住這并不意味著模塊使用 5 個 DSP slice。我開發的代碼執行組合乘法。這允許 0 個時鐘周期延遲,但會限制濾波器的速度。如果您的時序約束沒有得到滿足,您可以注冊乘法器的輸入,然后進行重新定時,讓 Vivado 選擇更有效的放置寄存器的位置。
/* combinational multiplications */
assign input_b0 = input_int * b0_int;
assign input_b1 = input_pipe1 * b1_int;
assign input_b2 = input_pipe2 * b2_int;
assign output_a1 = output_pipe1 * a1_int;
assign output_a2 = output_pipe2 * a2_int;
乘法的結果將在輸入的情況下相加,在輸出的情況下相減,以獲得濾波器輸出。由于乘積的輸出大小是操作數的兩倍,因此加法必須是相同的寬度。要在乘法上使用輸出,我們必須執行移位以刪除額外的小數位。關于額外的整數位置將在分配時被截斷。
assign output_2int = input_b0 + input_b1 + input_b2 - output_a1 - output_a2;
assign output_int = output_2int >>> (internal_decimal_width);
最后,輸出的值將被重新格式化為輸入輸出寬度。
assign m_axis_tdata = output_int >>> (internal_decimal_width-inout_decimal_width);
對于 AXI4-Stream 管理信號,由于濾波器作為橋接器,有 1 個周期延遲,因此管理信號會以 1 個周期延遲通過濾波器。
至此,我們已經實現了 Verilog 模塊并準備好用作帶阻濾波器。接下來是使用該tfdata函數在 MATLAB 中獲取系數。關于過濾器的寬度,我們將使用 18 位分辨率用于小數部分,2 用于整數部分,以使過濾器達到 +-2。接下來是獲取定點系數的 MATLAB 代碼。
% filter implemetation
[num, den] = tfdata(hwz)
b0 = num{1}(1)
b1 = num{1}(2)
b2 = num{1}(3)
a1 = den{1}(2)
a2 = den{1}(3)
% quantize
fracBits = 18;
b0_qq = floor(b0*2^fracBits)
b1_qq = floor(b1*2^fracBits)
b2_qq = floor(b2*2^fracBits)
a1_qq = floor(a1*2^fracBits)
a2_qq = floor(a2*2^fracBits)
這將返回下一個結果。
b0_qq =
252631
b1_qq =
-468081
b2_qq =
252631
a1_qq =
-468081
a2_qq =
243119
一旦我們有了五個系數,我們必須將它們作為輸入引入 Verilog 模塊中的系數輸入。
axis_biquad_v1_0 #(
.inout_width(15),
.inout_decimal_width(13),
.coefficient_width(20),
.coefficient_decimal_width(18),
.internal_width(20),
.internal_decimal_width(18)
) axis_biquad_inst0 (
.aclk(clk100mhz),
.resetn(pll_locked),
/* slave axis interface */
.s_axis_tdata({axis_data_signal_ch1[13], axis_data_signal_ch1}),
.s_axis_tlast(),
.s_axis_tvalid(&filter_prescaler),
.s_axis_tready(),
/* master axis interface */
.m_axis_tdata(axis_data_signal_filt),
.m_axis_tlast(),
.m_axis_tvalid(),
.m_axis_tready(),
/* coefficients */
.b0(20'd252631),
.b1(-20'd468081),
.b2(20'd252631),
.a1(-20'd468081),
.a2(20'd243119)
);
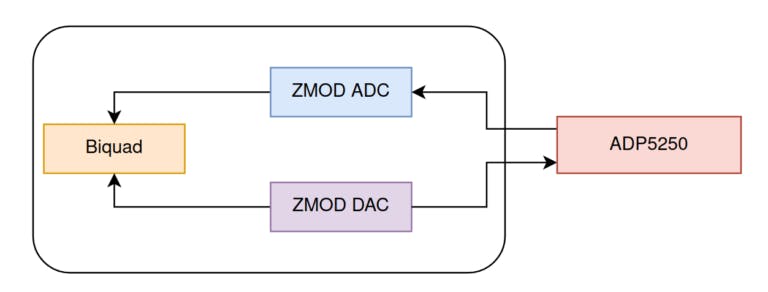
為了驗證這種效果是否發生,并使用預變形修復,我將使用帶有 ZMOD Scope 和 ZMOD AWG的Digilent 的 Eclypse Z7 。此外,為了生成信號并驗證濾波器的響應,我將使用全新的 Analog Discovery PRO 5250 ,它具有信號 125 Msps 信號發生器以及能夠獲取高達 1 Gsps 的兩通道示波器。
為了獲得自然離散頻率 ( ωd ),我將使用 ADP 5250 的一個非常有用的功能,它執行頻率掃描,為每個頻率獲取濾波器的增益,因此結果將是濾波器的波特圖. 要配置此模式,我們需要打開工具網絡。
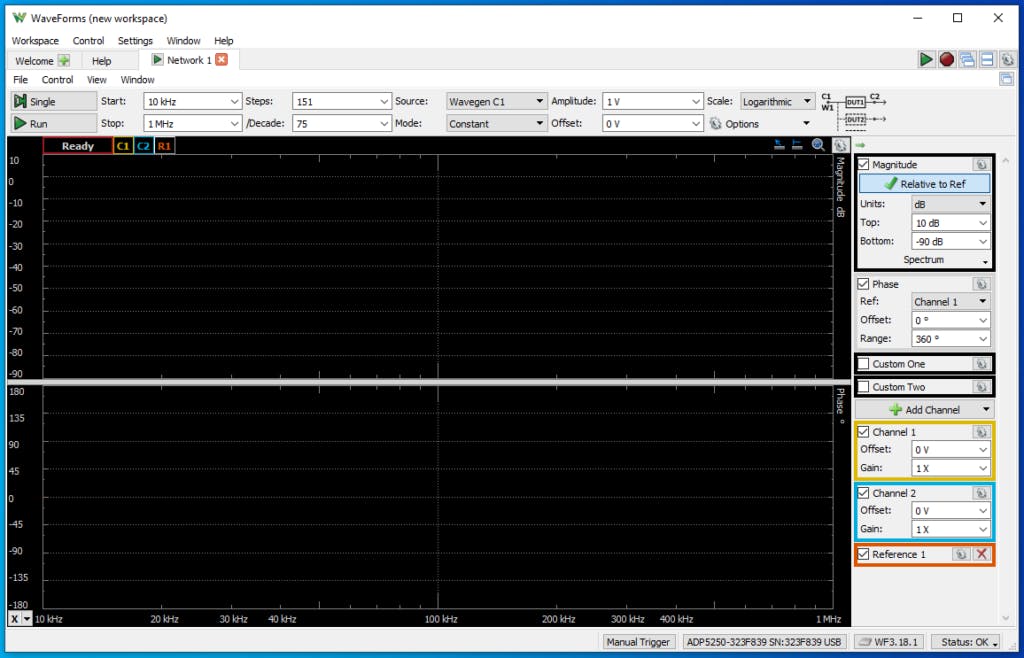
打開此工具后,我們需要配置點數,以及最小和最大頻率。我們還需要配置發生器將產生的信號幅度。在這種情況下,我的濾波器的固有頻率是 3 kHz,所以如果幅度為 1V,頻率范圍為 500 Hz 到 10 kHz,我將使用配置。點數將配置頻率步長。就我而言,我已根據需要更改了點數。
首先,我將雙二階濾波器配置為帶阻巴特沃斯濾波器,固有頻率為 3 kHz。這次我沒有糾正頻率扭曲。然后,單擊 Single,ADC 5250 將執行一個完整的交換。結果如下圖所示。
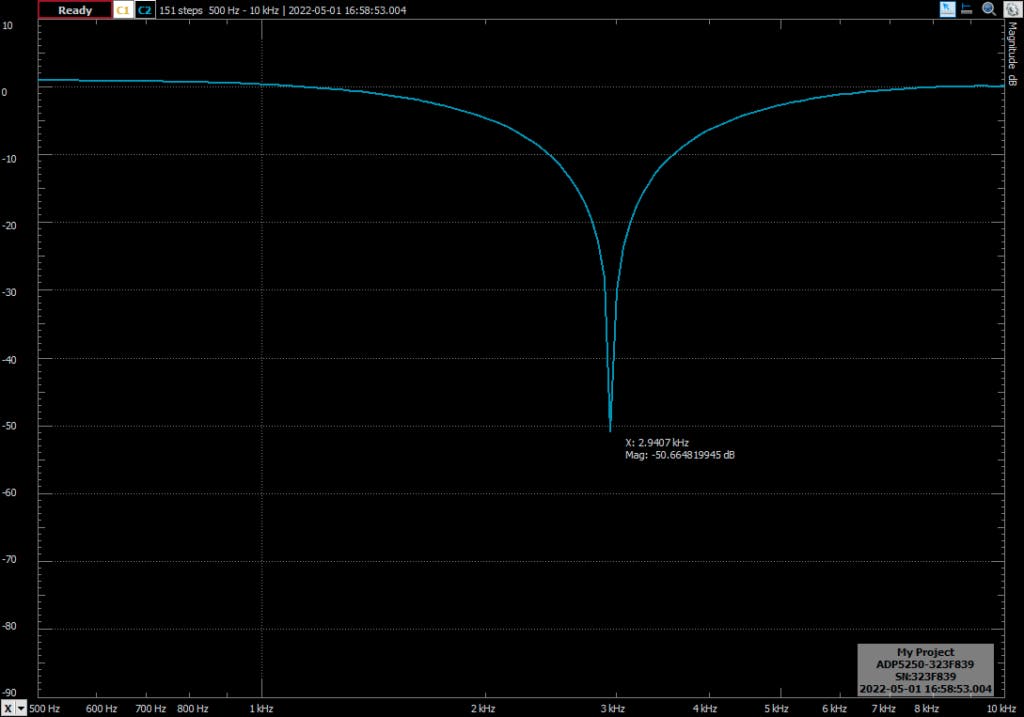
您可以看到濾波器的響應如何是預期的,但自然頻率為 2.9407 khz,比預期頻率低 59.3 Hz。對頻率應用預變形,濾波器的響應是下一個(注意圖像的縮放不同)。
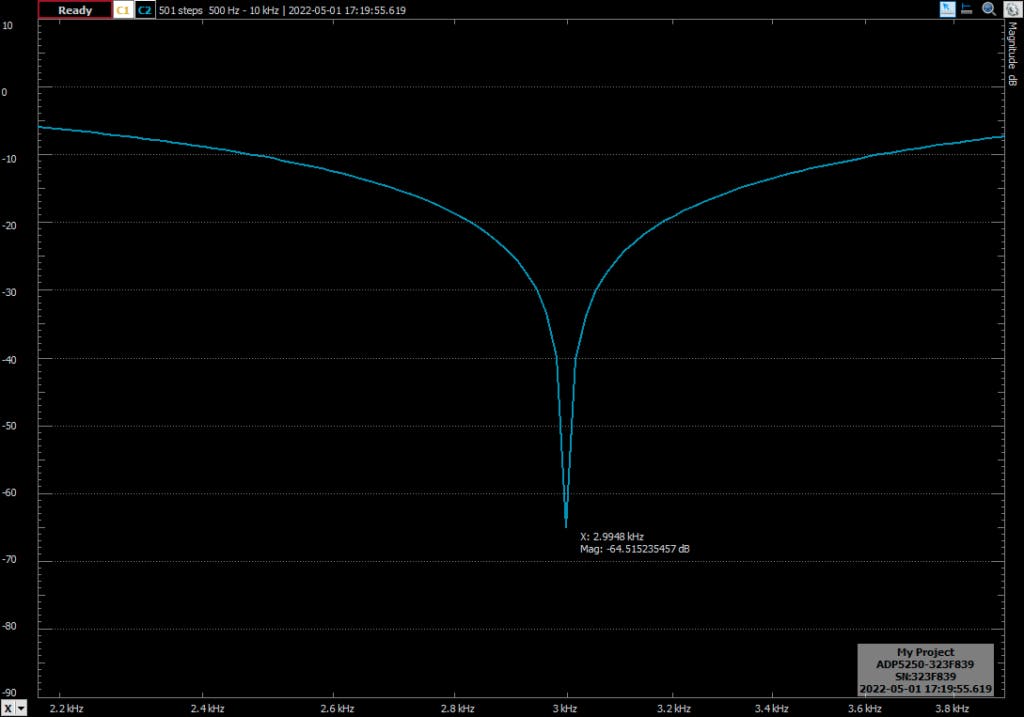
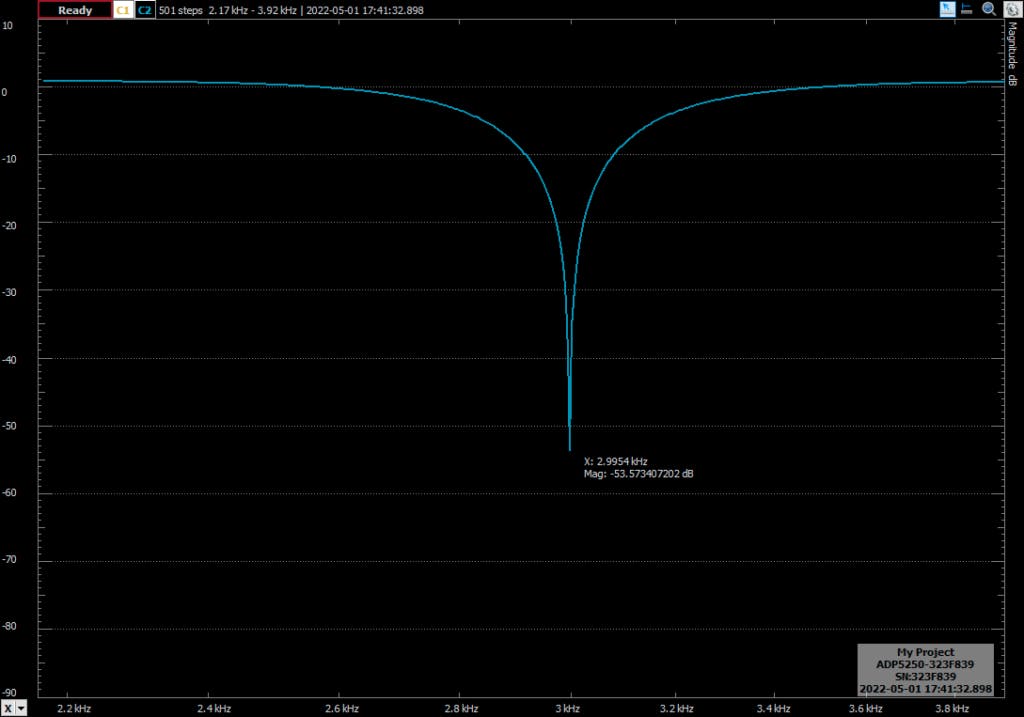
通過頻率校正,誤差如果為0.0052 Hz,這是一個卑鄙的誤差。在接下來的測試中,我將濾波器的品質因數增加到 5。這將對陷波的帶寬產生影響,從而獲得更窄帶的濾波器。
雙線性變換因其簡單性而被廣泛用于設計 IIR 濾波器。我們只需要用 z 函數替換連續傳遞函數中的 s。其他方法如脈沖不變性需要部分分數展開代數,所以過程有點復雜。此外,雙線性變換映射整個 s 平面,因此沒有混疊誤差。另一方面,它會在頻率上產生扭曲,但使用預扭曲,正如我們在這篇文章中看到的,我們可以修復該頻率偏差。
- IIR濾波器和FIR濾波器詳細對比
- 如何使用FPGA實現IIR數字濾波器的設計
- 基于IIR濾波器的混頻噪聲消除方案資料下載 9次下載
- IIR數字濾波器的FPGA實現 36次下載
- 基于ARM Cortex_M3的IIR濾波器的實現 5次下載
- 詳解FIR濾波器和IIR濾波器的區別 20次下載
- IIR濾波器 56次下載
- 基于DSP的IIR濾波器的設計 49次下載
- IIR數字濾波器設計 11次下載
- 基于MATLAB與CCS的IIR濾波器設計 81次下載
- 高階IIR濾波器的FPGA實現 115次下載
- 基于FPGA的高精度浮點IIR濾波器設計
- 利用DSP 實現IIR 濾波器的精度擴展
- 利用DSP實現IIR濾波器的精度擴展
- 基于FPGA的IIR數字濾波器的快捷設計
- iir濾波器的基本結構有哪幾種 3.3k次閱讀
- FIR濾波器和IIR濾波器的區別與聯系有哪些 4.4k次閱讀
- 基于FPGA的IIR數字濾波器設計 2.8k次閱讀
- IIR濾波器簡介(下) 9k次閱讀
- IIR濾波器簡介(上) 3.4k次閱讀
- IIR和FIR數字濾波器的特點 5.2k次閱讀
- FIR濾波器的MATLAB與FPGA設計 4.5k次閱讀
- 基于級聯結構和VHDL語言的IIR數字濾波器在FPGA上實現設計 2.7k次閱讀
- FPGA是如何設計并實現了32階FIR數字濾波器的硬件電路? 5.9k次閱讀
- 在FPGA內設計的高階音頻數字均衡濾波器整體設計方案詳解 3.7k次閱讀
- FIR與IIR濾波器的區別與特點比較 8.5w次閱讀
- 數字低通濾波器的設計 2w次閱讀
- 如何設計用于插值和抽取的IIR濾波器 9.6k次閱讀
- 數字下變頻中抽取濾波器的設計及FPGA實現 6.5k次閱讀
- IIR濾波器零相位數字濾波實現及應用 2.6w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費



 工商網監
工商網監
評論