即便服務機器人經歷市場降溫,行業內卷,玩家們卻依然趨之若鶩,紛紛入局,背后到底有什么魔力?
生成式預訓練Transformer(GPT)被吹捧為將徹底改變機器人技術。但實際應用中,GPT需要龐....

語義同步定位與建圖(SLAM)系統在對鄰近的語義相似物體進行建圖時面臨困境,特別是在復雜的室內環境中....

盡管不同商用場景的大多區域都十分相似,但非標準化的場景屬性無法避免的導致了不少corner case....
本文提出了一種將視覺語言模型(VLM)轉換為端到端導航策略的具體框架。不依賴于感知、規劃和控制之間的....
在追求松弛感的路上,每個人的方式或許各有不同,但相同的是,我們會不約而同的先為生活減負。
隨著大模型的蓬勃發展以及硬件技術的持續迭代,具身智能作為人工智能的關鍵分支,正逐漸成為全球范圍內的新....
掃地機器人內卷的終點是技術和價值,價格只是附屬品。
當所有人開始掘金時,INDEMIND決定做一個賣鏟子的人。
在本文中,我們提出了一種完全分布式的點線協同視覺慣性導航系統。我們通過蒙特卡羅模擬和真實環境數據集,....

在非靜態環境中進行地圖繪制和定位是機器人學的基本問題。之前的方法大多關注靜態和高度動態的物體,但在半....

既能保證效率和精度,又無需GPU,行業第一個達到此目標的視覺動態SLAM系統。

一直以來,商用清潔機器人的應用場景主要集中在大型商場、超市、寫字樓等,為什么1000平米以下的小型商....

不可置否,激光雷達已經成為掃地機器人的“耶路撒冷”。
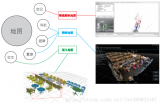
地圖點/路標點:將圖像上被觀察到的特征點通過三角化等方式進行深度恢復,我們就可以得到其對應的在三維空....

如何規劃機器人的運動方式是機器人開發領域的一大課題,本文分享GitHub的一個機器人技術中常用的路徑....

能夠看到,市面上無論是石頭、科沃斯、還是云鯨等頭部廠商,其高端產品基本都是激光+視覺融合方案,并且基....
粗配準就是再兩個點云還差得十萬八千里、完全不清楚兩個點云的相對位置關系的情況下,找到一個這兩個點云近....
雙目立體視覺一直是機器視覺研究領域的發展熱點和難點,“熱”是因為雙目立體視覺有著及其廣闊的應用前景,....

圖像分割(Image Segmentation)是計算機視覺領域中的一項重要基礎技術,是圖像理解中的....

關于利用OpenCV進行顏色分類,本文包含了HSV介紹及應用、cv2.inRange及應用、RGB與....
沒有人懷疑,VSLAM將是推動機器人再次迭代的關鍵之一。
與以往基于學習的視覺定位算法的區別在于:以前的方法往往需要數小時或數天的訓練,而且每個新場景都需要再....

在這篇文章中,我們將學習如何在OpenCV中使用基于深度學習的邊緣檢測,它比目前流行的canny邊緣....

雖然純視覺方案有著更高經濟性、可擴展性的獨特優勢,但一般認為純視覺方案的精準度和魯棒性還達不到激光雷....

SLAM 是 Simultaneous Localization and Mapping 的縮寫,中....
SLAM本質上是一個狀態估計問題,根據傳感器做劃分,主要是激光、視覺兩大類。激光SLAM的研究在理論....
簡單來說,基于雙目立體視覺的測距類似人類的雙眼,和基于TOF、結構光原理的測距不同,它不對外主動投射....



 工商網監
工商網監