") Apollo開放全長380km點(diǎn)云數(shù)據(jù)集,助推厘米級(jí)精度定位實(shí)現(xiàn)
Apollo開放全長380km點(diǎn)云數(shù)據(jù)集,助推厘米級(jí)精度定位實(shí)現(xiàn)

作為全球最大最活躍的自動(dòng)駕駛開放平臺(tái),Apollo不斷創(chuàng)新,持續(xù)拓展著自動(dòng)駕駛行業(yè)邊界。在聚焦賦能量產(chǎn)的Apollo5.0重磅面世之后,日前,Apollo在“數(shù)據(jù)開放”的大道上再次實(shí)現(xiàn)飛躍,向開發(fā)者開放一組總里程達(dá) 380km 的點(diǎn)云數(shù)據(jù)集,并在該數(shù)據(jù)集上驗(yàn)證了基于深度學(xué)習(xí)的激光點(diǎn)云自定位算法帶來的“厘米級(jí)定位精度”的實(shí)現(xiàn)。
據(jù)了解,針對(duì)自動(dòng)駕駛中的自定位問題,百度提出了一套基于深度學(xué)習(xí)的激光點(diǎn)云自定位算法。該算法使用不同類型的網(wǎng)絡(luò)結(jié)構(gòu)對(duì)傳統(tǒng)方法中的各功能模塊進(jìn)行替代。
同時(shí),為了驗(yàn)證算法的有效性,百度在 Apollo 平臺(tái)開放了一組總計(jì)約 380km 的數(shù)據(jù)集,該數(shù)據(jù)集包含了制圖、訓(xùn)練、測(cè)試三個(gè)子集,涵蓋了城市道路,園區(qū)內(nèi)部道路以及高速公路等多種場(chǎng)景,地圖和測(cè)試集之間的最長時(shí)間跨度達(dá)一年。
通過點(diǎn)云數(shù)據(jù)集進(jìn)行驗(yàn)證的基于深度學(xué)習(xí)的激光點(diǎn)云自定位算法以及相關(guān)技術(shù)出自論文《L3-Net:Towards Learning based LiDAR Localization for Autonomous Driving》,這篇論文收錄在今年 6 月份在美國洛杉磯長灘市舉行的國際頂會(huì) CVPR 2019里。

根據(jù)論文內(nèi)容,此項(xiàng)技術(shù)方案的領(lǐng)先性主要有:
提出了全球范圍內(nèi)首個(gè)基于深度學(xué)習(xí)的自動(dòng)駕駛自定位技術(shù)解決方案,可以準(zhǔn)確地估計(jì)車輛的位置和姿態(tài),實(shí)現(xiàn)了厘米級(jí)精度的定位效果。
使用不同的網(wǎng)絡(luò)結(jié)構(gòu)拆解取代傳統(tǒng)激光點(diǎn)云定位的技術(shù)流程,并將其串聯(lián)起來統(tǒng)一訓(xùn)練,使網(wǎng)絡(luò)能夠以"端到端"的方式完成在線激光點(diǎn)云定位任務(wù)。

▲傳統(tǒng)激光點(diǎn)云定位技術(shù)
定位作為自動(dòng)駕駛的基礎(chǔ)模塊之一,一直是行業(yè)研發(fā)熱點(diǎn)。現(xiàn)有的傳統(tǒng)激光點(diǎn)云定位技術(shù)包含了特征提取、特征匹配和時(shí)序優(yōu)化等模塊(如上圖所示)。整個(gè)算法的輸入包括實(shí)時(shí)在線激光點(diǎn)云、定位地圖以及來自慣性傳感器的初始預(yù)測(cè)的定位位置和姿態(tài),最后的輸出則是定位算法優(yōu)化之后的位姿結(jié)果。
盡管上述方案已經(jīng)取得了目前最佳的定位效果,但是這類人工設(shè)計(jì)的算法在進(jìn)行特征提取和匹配時(shí),對(duì)環(huán)境的變化非常敏感。導(dǎo)致在動(dòng)態(tài)變化的環(huán)境中無法最智能地捕捉環(huán)境中不變的信息(例如,地標(biāo)、路牌等),從而無法實(shí)現(xiàn)對(duì)自身位置的高精度高魯棒性的估計(jì)。這意味著,由于環(huán)境變化的劇烈程度,實(shí)際應(yīng)用中需要經(jīng)常對(duì)定位地圖進(jìn)行更新,成本也將上升。
與傳統(tǒng)方案不同的是,基于深度學(xué)習(xí)的激光定位系統(tǒng)在模塊上有了改變,它需要一個(gè)預(yù)先建立的激光點(diǎn)云定位地圖、在線激光點(diǎn)云以及慣性傳感器的預(yù)測(cè)位姿作為輸入。其中預(yù)建的激光點(diǎn)云定位地圖是通過離線制圖算法對(duì)多次采集的同一區(qū)域的點(diǎn)云數(shù)據(jù)進(jìn)行融合,并使用點(diǎn)云識(shí)別算法剔除動(dòng)態(tài)地物得到。在線點(diǎn)云是由自動(dòng)駕駛車輛上安裝的激光雷達(dá)設(shè)備在行駛過程中采集獲得,而預(yù)測(cè)位姿則由上一幀定位結(jié)果加上慣性傳感器或者車輛運(yùn)動(dòng)模型估計(jì)的增量運(yùn)動(dòng)來進(jìn)行遞推。這個(gè)定位框架通過最小化在線點(diǎn)云和地圖的匹配距離,優(yōu)化預(yù)測(cè)位姿從而獲得定位結(jié)果。
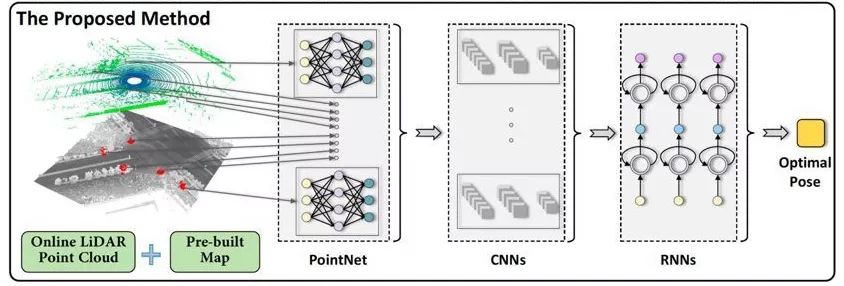
▲基于深度學(xué)習(xí)的無人車激光自定位技術(shù):L3-Net
百度提出的方案如上圖所示。對(duì)傳統(tǒng)方法中各個(gè)流程使用不同類型的網(wǎng)絡(luò)結(jié)構(gòu)進(jìn)行改造,進(jìn)而實(shí)現(xiàn)了開創(chuàng)性的基于深度學(xué)習(xí)的無人車激光自定位技術(shù):L3-Net。與傳統(tǒng)方法流程相比,L3-Net 使用PointNet 網(wǎng)絡(luò)來實(shí)現(xiàn)特征提取,再使用3D CNNs 網(wǎng)絡(luò)進(jìn)行特征匹配和優(yōu)化,最終使用RNNs 網(wǎng)絡(luò)完成時(shí)序上的平滑。
L3-Net實(shí)質(zhì)上是基于學(xué)習(xí)的激光自定位網(wǎng)絡(luò)架構(gòu)。如下圖所示,該網(wǎng)絡(luò)通過兩個(gè)階段進(jìn)行訓(xùn)練,第一階段訓(xùn)練只包含了黑色箭頭部分,包括關(guān)鍵點(diǎn)選擇、特征提取以及基于 3D CNNs 的特征匹配;第二階段訓(xùn)練包含了青色箭頭的部分,這一階段訓(xùn)練包含了用于時(shí)序平滑的 RNNs 網(wǎng)絡(luò)。
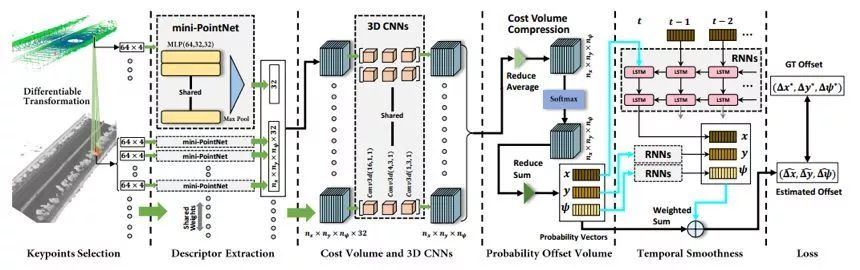
▲基于學(xué)習(xí)的激光自定位網(wǎng)絡(luò)架構(gòu) L3-Net算法流程
目前,點(diǎn)云定位數(shù)據(jù)集面向所有開發(fā)者開放,通過以下操作即可獲取相關(guān)數(shù)據(jù)。
進(jìn)入Apollo首頁,并點(diǎn)擊【開放平臺(tái)】中的【數(shù)據(jù)平臺(tái)】,或直接訪問數(shù)據(jù)開放平臺(tái)地址:http://data.apollo.auto/?locale=zh-cn&lang=en。找到【標(biāo)注數(shù)據(jù)】欄目下的【阿波羅加州南灣點(diǎn)云定位數(shù)據(jù)集】即可。
點(diǎn)擊進(jìn)入數(shù)據(jù)集詳情頁,選擇右上角【查看使用手冊(cè)】,可以查看詳細(xì)的數(shù)據(jù)集說明和使用說明。
如上圖所示,點(diǎn)擊【樣例數(shù)據(jù)】可以下載少量的樣例數(shù)據(jù),用于具體理解數(shù)據(jù)格式。點(diǎn)擊【申請(qǐng)使用】,則可以申請(qǐng)獲得在云端使用數(shù)據(jù)集中大量數(shù)據(jù)的資格。
自2017年百度推出Apollo開放平臺(tái)以來,Apollo一直秉承“開放能力 共享資源 加速創(chuàng)新 持續(xù)共贏”的理念和精神,為開發(fā)者們提供無門檻的自動(dòng)駕駛開放平臺(tái),無論是數(shù)據(jù)平臺(tái)、感知平臺(tái)、安全平臺(tái)還是解決方案,Apollo開放平臺(tái)將一直為有需要的小伙伴敞開。未來,Apollo期待與更多開發(fā)者攜手同行。
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
794文章
14890瀏覽量
180023 -
Apollo
+關(guān)注
關(guān)注
5文章
350瀏覽量
19724
原文標(biāo)題:Apollo開放全長380km點(diǎn)云數(shù)據(jù)集 助推厘米級(jí)精度定位實(shí)現(xiàn)
文章出處:【微信號(hào):Apollo_Developers,微信公眾號(hào):Apollo開發(fā)者社區(qū)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
特高壓巡檢神器:云翎智能厘米級(jí)高精度定位工作記錄儀破解復(fù)雜地形施工難題

厘米級(jí)定位筑牢安全防線:云翎智能高精度工作記錄儀實(shí)現(xiàn)電網(wǎng)施工風(fēng)險(xiǎn)“透明化”管控

云翎智能厘米級(jí)高精度定位工作記錄儀:為鐵路巡檢筑起“數(shù)字安全防線”
從厘米到毫米:云翎智能RTK高精度定位解決方案推動(dòng)鐵路巡檢施工精度革命
云翎智能國網(wǎng)電力單北斗高精度定位巡檢記錄儀如何重塑電力巡檢安全標(biāo)準(zhǔn)

鐵路施工安全新防線:云翎智能高精度定位記錄儀為施工巡檢提供厘米級(jí)精準(zhǔn)保障

云翎智能高精度人員定位工作記錄儀助力鐵路隧道施工實(shí)現(xiàn)零事故目標(biāo)

厘米級(jí)定位賦能隧道攻堅(jiān):云翎智能高精度鐵路工作記錄儀如何破解鐵路施工“盲區(qū)”難題

從軌尖到云端:云翎智能rtk高精度定位工作記錄儀構(gòu)建鐵路巡檢數(shù)字孿生
云翎智能鐵路人員高精度工作記錄儀適配多場(chǎng)景厘米級(jí)定位解決方案

真點(diǎn)科技高精度定位服務(wù)助力割草機(jī)器人規(guī)模應(yīng)用

鐵路巡檢升級(jí):云翎智能高精度執(zhí)法記錄儀+指揮調(diào)度系統(tǒng)實(shí)現(xiàn)故障秒級(jí)響應(yīng)

MESH自組網(wǎng)賦能森林防火:云翎智能無線自組網(wǎng)厘米級(jí)定位與實(shí)時(shí)火情傳輸

油氣管道巡檢:云翎智能RTK高精度巡檢記錄儀如何實(shí)現(xiàn)泄漏點(diǎn)與地質(zhì)風(fēng)險(xiǎn)預(yù)警?

RTK技術(shù)揭秘:基線長度如何決定厘米級(jí)定位精度?



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論