") 機(jī)床、木工、鋰電產(chǎn)線都在用的磁柵尺讀數(shù)頭,工程師真正關(guān)心的參數(shù)只有這幾項(xiàng)
機(jī)床、木工、鋰電產(chǎn)線都在用的磁柵尺讀數(shù)頭,工程師真正關(guān)心的參數(shù)只有這幾項(xiàng)

磁柵尺讀數(shù)頭的價(jià)值,不在于“替代光柵尺”這句空話,而在于它能在油污、粉塵、振動(dòng)和長(zhǎng)距離工況下,把位置反饋這件事做得更穩(wěn)定。選型時(shí)最容易出錯(cuò)的不是精度本身,而是磁極距匹配、輸出電平與控制器接口、電纜環(huán)境適配和安裝間隙控制。把這幾個(gè)問(wèn)題理順,后面的型號(hào)選擇就會(huì)清晰很多。

在數(shù)控機(jī)床、木工機(jī)械、石材切割、鋰電設(shè)備和液壓系統(tǒng)里,位移反饋一旦不穩(wěn)定,后果往往不是“數(shù)據(jù)不準(zhǔn)”這么簡(jiǎn)單,而是產(chǎn)品超差、反復(fù)報(bào)警、維修停機(jī),甚至整臺(tái)設(shè)備節(jié)拍被拖慢。很多工程師第一次接觸磁柵尺讀數(shù)頭時(shí),最常問(wèn)的問(wèn)題只有一句:這東西到底該怎么選?
結(jié)論先擺在前面:磁柵尺讀數(shù)頭選型,核心不是先看品牌,也不是先看宣傳里的“高精度”,而是先判斷 應(yīng)用是直線還是旋轉(zhuǎn)、磁極距選 2mm 還是 5mm、控制器需要單端還是差分、供電是 5V 還是 24V、現(xiàn)場(chǎng)能否穩(wěn)定控制安裝間隙。這五件事如果前期沒(méi)有想清楚,后面即便型號(hào)買(mǎi)對(duì)了,也可能裝出來(lái)一套不穩(wěn)定系統(tǒng)。
一、先別急著選型號(hào),先判斷磁柵尺讀數(shù)頭適不適合你的工況
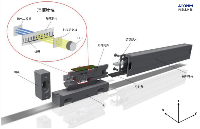
磁柵尺讀數(shù)頭本質(zhì)上是一套非接觸式位移測(cè)量系統(tǒng)。它不是單獨(dú)工作的,必須和磁條或磁環(huán)配合使用。它的優(yōu)勢(shì)非常明確:抗污染、抗振動(dòng)、可做長(zhǎng)距離、維護(hù)壓力相對(duì)低。所以它并不是在所有場(chǎng)景里都“更好”,而是在惡劣工況里更合適。

問(wèn):為什么很多機(jī)床和自動(dòng)化設(shè)備開(kāi)始考慮磁柵尺讀數(shù)頭?
答:不是因?yàn)樗案呒?jí)”,而是因?yàn)楹芏喱F(xiàn)場(chǎng)問(wèn)題本來(lái)就不是算法問(wèn)題,而是環(huán)境問(wèn)題。油污、粉塵、鐵屑、震動(dòng)會(huì)先把光學(xué)方案拖垮,系統(tǒng)再好的補(bǔ)償也救不了一個(gè)持續(xù)失真的反饋信號(hào)。
二、磁柵尺讀數(shù)頭選型的第一步,是先把直線場(chǎng)景和旋轉(zhuǎn)場(chǎng)景分開(kāi)
這是很多項(xiàng)目最早就會(huì)犯的錯(cuò)誤。讀數(shù)頭雖然是核心,但它必須匹配后端載體。做直線位移測(cè)量,要配磁條;做旋轉(zhuǎn)角度測(cè)量,要配磁環(huán)。看起來(lái)只是附件不同,實(shí)際上安裝結(jié)構(gòu)、原點(diǎn)需求、空間限制和調(diào)試方式都不一樣。
1. 直線位移測(cè)量場(chǎng)景
如果你的設(shè)備是工作臺(tái)移動(dòng)、滑臺(tái)定位、刀具行程反饋、模組位移控制,這類(lèi)都屬于直線場(chǎng)景。對(duì)應(yīng)的通常是磁條系統(tǒng),常見(jiàn)于機(jī)床、木工機(jī)械、石材設(shè)備、鋰電導(dǎo)軌、注塑和液壓行程控制。
2. 旋轉(zhuǎn)角度測(cè)量場(chǎng)景
如果你的設(shè)備是旋轉(zhuǎn)工作臺(tái)、電機(jī)主軸、轉(zhuǎn)盤(pán)定位、大孔徑角度測(cè)量,則更適合磁環(huán)方案。磁環(huán)的關(guān)鍵不只是尺寸匹配,還包括是否需要 Z 向原點(diǎn)、轉(zhuǎn)速上限以及是否需要不銹鋼防護(hù)環(huán)來(lái)抵抗高速甩飛風(fēng)險(xiǎn)。
flowchart TD
A[開(kāi)始選型] --> B{測(cè)量對(duì)象是什么}
B -->|直線位移| C[磁條系統(tǒng)]
B -->|旋轉(zhuǎn)角度| D[磁環(huán)系統(tǒng)]
C --> E[確認(rèn)磁極距 2mm 或 5mm]
D --> F[確認(rèn)外徑/內(nèi)徑與是否要Z原點(diǎn)]
E --> G[再選讀數(shù)頭輸出分辨率與信號(hào)類(lèi)型]
F --> G
G --> H[核對(duì)供電電壓與控制器接口]
H --> I[復(fù)核安裝間隙與線纜環(huán)境]

三、磁極距怎么選?這是磁柵尺讀數(shù)頭選型里最容易被忽視的硬條件
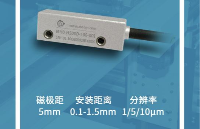
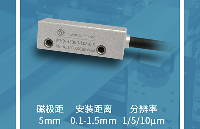
阿童木當(dāng)前主推的磁柵尺讀數(shù)頭,可以理解為圍繞兩類(lèi)磁極距配置展開(kāi):H200 對(duì)應(yīng) 2mm 磁極距,H500 對(duì)應(yīng) 5mm 磁極距。這不是命名區(qū)別,而是底層匹配關(guān)系。如果磁極距選錯(cuò),后面所有參數(shù)都失去意義。

適用判斷 更適合間隙控制更嚴(yán)格、對(duì)精細(xì)反饋要求更高的場(chǎng)景 更適合裝配余量更寬、現(xiàn)場(chǎng)振動(dòng)更明顯的工況
簡(jiǎn)單理解,2mm 磁極距方案通常要求更嚴(yán)格的安裝控制;5mm 磁極距方案在機(jī)械裝配容差上更寬松一些。如果現(xiàn)場(chǎng)設(shè)備結(jié)構(gòu)剛性一般、安裝空間受限、裝配人員水平參差不齊,那就不能只盯著“理論精度”看,必須把后期安裝一致性一起算進(jìn)去。
問(wèn):磁極距越小,是不是就一定更好?
答:不一定。磁極距更小,通常意味著系統(tǒng)對(duì)安裝精度的要求更高。若設(shè)備本體振動(dòng)大、支架剛性不足、間隙不容易控制,理論優(yōu)勢(shì)可能會(huì)被現(xiàn)場(chǎng)裝配誤差抵消。
四、分辨率不是越高越好,先看控制需求,再看速度邊界
很多采購(gòu)或新項(xiàng)目工程師選位移傳感器時(shí),第一反應(yīng)就是“精度越高越安全”。這個(gè)邏輯在工業(yè)現(xiàn)場(chǎng)并不總成立。磁柵尺讀數(shù)頭支持 1μm、5μm、10μm、25μm 等不同分辨率,真正該問(wèn)的問(wèn)題其實(shí)是:你的控制系統(tǒng)是否真的需要這么細(xì)的脈沖分辨率,以及設(shè)備速度是否會(huì)把輸出頻率推到邊界上。
已知產(chǎn)品參數(shù)里,系統(tǒng)最大檢測(cè)速度可到 8m/s,輸出頻率邊界不高于 2000kHz。分辨率定得越細(xì),單位距離內(nèi)脈沖數(shù)越高,對(duì)控制器高速計(jì)數(shù)能力和信號(hào)質(zhì)量的要求也越高。如果控制器跟不上,再高的分辨率也只是紙面參數(shù)。
實(shí)際建議:
設(shè)備以定位控制、重復(fù)精度為主,且控制器高速計(jì)數(shù)能力充足,可優(yōu)先評(píng)估 1μm 或 5μm。
設(shè)備更強(qiáng)調(diào)穩(wěn)定運(yùn)行、抗干擾和接線便利,10μm 或 25μm 往往更穩(wěn)妥。
高速長(zhǎng)行程設(shè)備,必須同時(shí)核對(duì)運(yùn)行速度、脈沖頻率和 PLC 或運(yùn)動(dòng)控制卡的輸入上限。
五、輸出信號(hào)和供電電壓,才是最容易把項(xiàng)目做壞的地方
這一點(diǎn)必須單獨(dú)拎出來(lái)講。資料里已經(jīng)寫(xiě)得很明確:讀數(shù)頭輸出脈沖信號(hào)電平嚴(yán)格跟隨供電電壓。供電 24V,單端輸出就是 24V;供電 5V,差分輸出就是 5V。很多現(xiàn)場(chǎng)故障不是傳感器不準(zhǔn),而是接口根本沒(méi)匹配。

如果你現(xiàn)在手上的 PLC 或運(yùn)動(dòng)控制卡只接受 5V 編碼器信號(hào),那就不能因?yàn)楝F(xiàn)場(chǎng)供電方便就直接給讀數(shù)頭上 24V。這個(gè)問(wèn)題聽(tīng)起來(lái)基礎(chǔ),但恰恰是大量項(xiàng)目返工的根源。真正穩(wěn)妥的做法,是在選型初期就把控制器接口規(guī)格表和傳感器接口規(guī)格表放在一起核對(duì),不要等到接線時(shí)才發(fā)現(xiàn)問(wèn)題。
六、安裝間隙控制不好,再好的磁柵尺讀數(shù)頭也跑不穩(wěn)
資料里給出的間隙條件已經(jīng)很清楚。H200 的工作面距磁條高度要控制在 0.1-1.0mm,H500 則是 0.1-1.5mm。這不是“建議值”,而是系統(tǒng)穩(wěn)定運(yùn)行的基本前提。很多現(xiàn)場(chǎng)調(diào)試時(shí)信號(hào)忽高忽低,最后查下來(lái),不是芯片問(wèn)題,也不是軟件問(wèn)題,而是安裝支架跳動(dòng)或基準(zhǔn)面不平。
如果設(shè)備運(yùn)行時(shí)存在明顯熱變形、機(jī)械抖動(dòng)或工件沖擊,那選型時(shí)就該優(yōu)先考慮裝配余量更寬的方案,并同步評(píng)估支架剛性。單純追求更細(xì)分辨率,卻不給安裝留余地,后面一定會(huì)在現(xiàn)場(chǎng)付出代價(jià)。
七、不同場(chǎng)景下,磁柵尺讀數(shù)頭應(yīng)該怎么選
1. 數(shù)控機(jī)床、磨床、車(chē)床
這類(lèi)設(shè)備關(guān)注的是位置反饋的穩(wěn)定性和加工一致性。若現(xiàn)場(chǎng)有切削液、油污和較強(qiáng)震動(dòng),磁柵尺讀數(shù)頭比傳統(tǒng)光學(xué)反饋更有現(xiàn)實(shí)意義。建議優(yōu)先核對(duì)控制器接口、安裝基準(zhǔn)精度和分辨率需求,不要只看理論參數(shù)。
2. 木工機(jī)械、石材切割設(shè)備
這類(lèi)場(chǎng)景的關(guān)鍵不是“高精尖”,而是粉塵多、清潔難、設(shè)備不能動(dòng)不動(dòng)停機(jī)。磁柵系統(tǒng)在這里的優(yōu)勢(shì)非常直接,重點(diǎn)是選擇抗污染能力強(qiáng)、布線方便、安裝余量足夠的組合。
3. 鋰電、光伏自動(dòng)化產(chǎn)線
這類(lèi)產(chǎn)線經(jīng)常會(huì)遇到較長(zhǎng)導(dǎo)軌和高速位移控制。選型時(shí)要優(yōu)先看長(zhǎng)距離磁條方案、輸出頻率邊界和高速狀態(tài)下的計(jì)數(shù)能力,必要時(shí)應(yīng)優(yōu)先考慮差分輸出,降低遠(yuǎn)距離傳輸干擾風(fēng)險(xiǎn)。
4. 機(jī)器人與旋轉(zhuǎn)軸控制
如果配合磁環(huán)做角度測(cè)量,重點(diǎn)就從“長(zhǎng)度”變成“尺寸、原點(diǎn)和轉(zhuǎn)速”。需要原點(diǎn)復(fù)位的設(shè)備,要提前確定是否定制 Z 向原點(diǎn);高速旋轉(zhuǎn)或高溫工況,則要評(píng)估不銹鋼防護(hù)環(huán)方案。

八、一張表看懂磁柵尺讀數(shù)頭選型順序

九、選型結(jié)論:磁柵尺讀數(shù)頭不是萬(wàn)能方案,但在惡劣工況里通常更現(xiàn)實(shí)
如果你的設(shè)備工作環(huán)境干凈、結(jié)構(gòu)剛性高、維護(hù)條件好,而且項(xiàng)目追求的是極限精度,那可以繼續(xù)和高等級(jí)光學(xué)方案做細(xì)致比較。但如果你的設(shè)備常年運(yùn)行在油污、粉塵、鐵屑、震動(dòng)或長(zhǎng)距離場(chǎng)景里,那么磁柵尺讀數(shù)頭往往不是“退而求其次”,反而是更貼近現(xiàn)場(chǎng)現(xiàn)實(shí)的選擇。
真正有效的選型順序,是先看工況,再看機(jī)械結(jié)構(gòu),再看接口,最后才是型號(hào)。把順序搞反,最容易買(mǎi)到一套看起來(lái)參數(shù)很漂亮、落地卻不穩(wěn)定的系統(tǒng)。
如果你已經(jīng)在做機(jī)床、木工、鋰電或旋轉(zhuǎn)軸項(xiàng)目,最省時(shí)間的方式不是先比價(jià),而是先把 控制器接口、行程長(zhǎng)度、運(yùn)行速度、安裝空間和現(xiàn)場(chǎng)照片 整理出來(lái)。阿童木技術(shù)團(tuán)隊(duì)可以據(jù)此給出更貼近現(xiàn)場(chǎng)的磁柵尺讀數(shù)頭、磁條或磁環(huán)組合建議,并協(xié)助判斷 2mm/5mm 磁極距、分辨率和信號(hào)輸出方案是否匹配。
-
機(jī)床
+關(guān)注
關(guān)注
1文章
667瀏覽量
32461 -
磁柵尺
+關(guān)注
關(guān)注
0文章
37瀏覽量
7481
發(fā)布評(píng)論請(qǐng)先 登錄
威海三豐電子供應(yīng)濰坊煙臺(tái)開(kāi)發(fā)區(qū)磁柵尺
磁柵尺讀數(shù)頭的常見(jiàn)故障問(wèn)題現(xiàn)象
阿童木磁柵尺讀數(shù)頭的特點(diǎn)及使用注意事項(xiàng)

磁柵尺讀數(shù)頭在工業(yè)設(shè)備上的常見(jiàn)應(yīng)用場(chǎng)景

磁柵尺丨磁柵讀頭丨磁柵電子尺的特點(diǎn)及安裝步驟

光柵尺替代方案:磁柵尺讀數(shù)頭丨磁柵丨磁讀頭
激光內(nèi)雕機(jī)用阿童木磁柵尺讀數(shù)頭實(shí)現(xiàn)XYZ定位
磁柵尺讀數(shù)頭是什么?磁柵尺讀數(shù)頭角度測(cè)量與特點(diǎn)

磁柵尺有幾種常見(jiàn)故障?

直線電機(jī)模組中光柵尺和磁柵尺的區(qū)別
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車(chē)電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專(zhuān)欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 電子發(fā)燒友
- 關(guān)于我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 張迎輝:mikezhang@elecfans.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察

版權(quán)所有 ? 長(zhǎng)沙勒克斯教育咨詢(xún)有限公司
湖南省長(zhǎng)沙市開(kāi)福區(qū)月湖街道匍園路20號(hào)聚恒科技園1棟2301-1房
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023036445號(hào)-105-1
工商網(wǎng)監(jiān)
湘ICP備2023036445號(hào)-105-1
評(píng)論