 吸塵器馬達驅動板的高效率、低噪聲控制技術
吸塵器馬達驅動板的高效率、低噪聲控制技術

高速無刷直流(BLDC)電機已成為新一代無線吸塵器的核心動力部件,其驅動板性能直接決定整機吸力、續航、噪音與可靠性。本文圍繞高效率與低噪聲兩大核心目標,從功率拓撲、硬件設計、驅動策略、FOC 算法、噪聲抑制及系統優化六個維度,系統闡述吸塵器 BLDC 馬達驅動板的關鍵控制技術,給出可工程落地的方案,為高性能吸塵器電控開發提供完整技術參考。
一、吸塵器 BLDC 馬達普遍工作在10萬~15萬 r/min超高速區間,具有電頻率高、負載突變劇烈、體積嚴苛、電池供電壓降明顯等特點。傳統方波六步驅動存在轉矩脈動大、噪聲尖銳、效率偏低等問題,已無法滿足高端機型需求。 現代吸塵器驅動板必須同時實現: 1. 高效率:整機效率 ≥ 88%,輕載效率不降,延長續航; 2. 低噪聲:電磁噪聲、氣動噪聲、機械噪聲綜合抑制,聽覺柔和; 3. 高動態:快速啟停、快速升速、堵轉自恢復; 4. 高可靠性:過流、過溫、欠壓、堵轉全保護。 本文以高速 BLDC 驅動 + 磁場定向控制(FOC)為基礎,重點論述高效率與低噪聲的協同實現技術。
二、吸塵器馬達驅動系統損耗與噪聲來源分析2.1 效率損耗主要來源 1. 功率管損耗:導通損耗 + 開關損耗; 2. 驅動損耗:柵極電荷、驅動電壓不合理帶來額外損耗; 3. 電流采樣損耗:采樣電阻發熱、運放功耗; 4. 輔助電源損耗:LDO 發熱、非同步整流效率低; 5. 電機本體損耗:鐵耗、銅耗、風摩耗。2.2 噪聲三大來源 1. 電磁噪聲:PWM 諧波、換相脈動、電流畸變、磁場諧波; 2. 機械噪聲:轉子不平衡、軸承振動、結構共振; 3. 氣動噪聲:風葉湍流、風道嘯叫、轉速波動。 其中電控可優化部分:電磁噪聲、轉矩脈動、電流諧波、PWM 音頻噪聲、轉速波動激勵噪聲。這也是本文控制技術的核心落點。
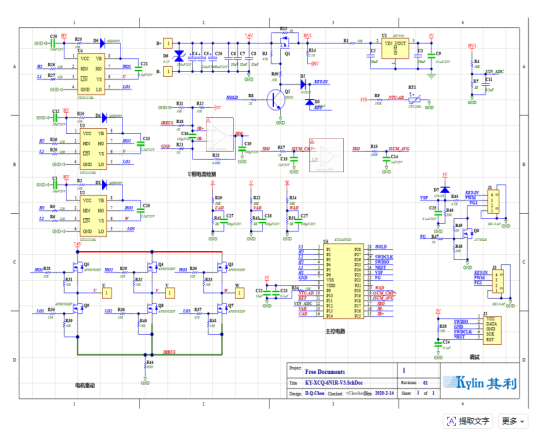
三、面向高效率的硬件架構與功率設計技術 3.1 功率拓撲與器件選型 吸塵器驅動板主流采用三相全橋逆變拓撲。 1. MOSFET 選型原則 - 低 (R_{ds(on)}),減小導通損耗; - 低 (Q_g)、低 (Q_{rr}),降低開關損耗與振鈴; - 電池包(21.6V/25.2V)系統:選用 30V/40V 等級 N 溝道 MOSFET。 2. 柵極驅動優化- 采用半橋驅動芯片,如 LN3503、EG2133、L6234 等; - 柵極串接電阻 5~15Ω可調,抑制尖峰與 EMI; - 自舉電容選用高頻特性好的陶瓷電容,保證高壓側可靠開通。 3. 母線與濾波設計 - 高頻薄膜電容緊靠橋臂,降低功率環路寄生電感; - 寄生電感越小,電壓尖峰越小、EMI 越小、開關損耗越低。3.2 高效率電流采樣方案 1. 單電阻采樣 / 雙電阻采樣 / 三電阻采樣 - 吸塵器高速 FOC 推薦:雙電阻或三電阻采樣,相位重建簡單、魯棒性強; 2. 采樣電阻:采用 2~5 mΩ合金采樣電阻,溫漂小、損耗低; 3. 運放:選用高帶寬、低失調電流檢測放大器,如 INA180/181。 3.3 低損耗輔助電源 - 禁止使用 LDO 直接從高壓轉 5V/3.3V; - 采用同步整流 Buck,效率 ≥ 93%; - 輕載進入脈沖跳躍模式,進一步降低待機損耗。
四、高效率控制算法與策略 4.1 控制架構:方波 vs FOC - 六步方波:結構簡單、成本低,但脈動大、噪聲尖、高速效率低; - FOC 磁場定向控制:電流正弦、轉矩平滑、高速弱磁易擴展,是高效率低噪聲首選。 本文以 FOC 為核心架構。 4.2 高效率 FOC 核心策略 1. id=0 控制 表貼式 BLDC 采用 (i_d=0),使電流全部用于產生轉矩,銅耗最小。 2. 最大轉矩電流比(MTPA) 內置式 IPMSM 可使用 MTPA 進一步提升效率,吸塵器多為表貼式,以 (i_d=0) 為主。 3. 高速弱磁控制10萬 r/min 以上反電動勢接近母線電壓,必須弱磁擴速: - 注入負 (i_d) 削弱主磁通; - 電壓閉環弱磁,防止進入電壓飽和導致失控、嘯叫。 4. SVPWM 調制 - 相比 SPWM,電壓利用率提高 15.47%; - 相同母線電壓下可達到更高轉速,且諧波更少。 4.3 開關頻率優化 - 推薦載波頻率:20kHz~40kHz; - <20kHz:進入人耳聽覺范圍,易產生高頻嘯叫; - >40kHz:開關損耗顯著上升,效率下降。 - 最優區間:25kHz~32kHz**,兼顧效率與聽覺靜音。
五、低噪聲控制關鍵技術 5.1 轉矩脈動抑制 1. 電流正弦化FOC 使相電流接近理想正弦,消除六步方波的臺階狀電流,噪聲從“尖銳嘯叫”變為“平穩風噪”。 2. 換相脈動補償無霍爾驅動中,通過滑模觀測器(SMO)/ 擴展反電動勢觀測器精準估算轉子位置,換相誤差<±2°,大幅降低振動。 3. 死區補償死時間會導致電流畸變、諧波增大、噪聲增加。 - 基于電流極性的死區直接補償; - 或在線誤差電壓補償,改善電流波形正弦度。 5.2 PWM 與音頻噪聲抑制 1. 高頻 PWM 避開人耳敏感區(2k~16kHz),直接移到 20kHz 以上; 2. 抖動頻率(Dithering):輕微隨機化載波頻率,分散單一頻率噪聲能量,聽覺更柔和; 3. 軟開關 / 緩變驅動:優化 MOSFET 壓擺率,降低 di/dt、dv/dt 沖擊。 5.3 轉速平滑與動態降噪 1. 平滑加減速啟動/換擋/變吸力時,限制加速度與加加速度(Jerk),避免瞬態沖擊噪聲。 2. 轉速環帶寬自適應- 穩態:低帶寬,轉速更平穩,噪聲小; - 負載突變:自動提高帶寬,快速穩速,不丟轉、不咆哮。 3. 共振點回避測試風道/馬達結構共振轉速區間,在程序中設置禁跑區間,快速穿過或不運行。
六、無傳感器位置觀測與高速平穩性 吸塵器幾乎全部采用無霍爾 BLDC,位置觀測直接決定噪聲與平穩性。 6.1 反電動勢觀測與濾波 - 基于反電動勢過零點僅適合低速六步驅動; - 高速必須使用觀測器: - 滑模觀測器 SMO - 擴展反電動勢觀測器 - 模型參考自適應 MRAS 6.2 相位延遲補償 高速下觀測器與濾波器存在相位滯后,必須: - 根據轉速查表補償或模型補償; - 保證在 10萬~15萬 r/min 范圍內,角度估算依然精準。 精準位置 → 精準電流相位 → 平穩轉矩 → 低噪聲、高效率。
七、系統級高效率低噪聲優化措施 7.1 啟動策略優化 1. 預定位 + 平緩開環啟動,不抖動、不沖擊; 2. 低速平穩切入閉環 FOC,避免切換振動。 7.2 變功率/變吸力模式控制 - 低檔:降低轉速與電流,效率最優區間運行; - 高檔:滿功率輸出,弱磁保證最高轉速; - 電池低壓時自動限功率,保證續航與不過流。 7.3 EMC 與噪聲傳導抑制 - 輸入端增加共模電感 + X2 電容 + Y 電容; - 功率地與信號地單點連接,減少地環路噪聲; - 電機線短、直、靠近屏蔽,降低輻射噪聲。
八、性能指標與實測效果 采用本文技術方案的驅動板典型實測水平: - 系統效率:88%~92%(額定功率點); - 轉速范圍:0~15萬 r/min 平穩可控; - 噪聲水平:相比六步方波降低 6~12dB(A),無尖銳嘯叫; - 電流 THD:<5%(FOC 穩態); - 啟動:無抖動、無沖擊、零堵轉。
九、結論 吸塵器馬達驅動板的高效率與低噪聲是硬件與算法高度協同的結果: 1. 硬件:低損耗功率拓撲、低寄生布局、高效率采樣與電源; 2. 算法:FOC + SVPWM + 觀測器 + 弱磁 + 死區補償,實現正弦平穩驅動; 3.噪聲:超音頻 PWM、轉矩脈動抑制、平滑調速、共振規避共同實現靜音體驗; 4. 系統:自適應調速、變功率策略、電池能量管理最大化續航。 該套技術可直接應用于 10萬~15萬 r/min 無線吸塵器、除螨儀、高速吹風等消費類高速 BLDC 產品,具備很強的工程實用性與量產價值。
審核編輯 黃宇
-
馬達
+關注
關注
1文章
864瀏覽量
65070 -
驅動板
+關注
關注
21文章
237瀏覽量
33545
發布評論請先 登錄
高速高速吸塵器BLDC馬達驅動板硬件架構與算法實現
吸塵器馬達驅動板的高效率、低噪聲控制技術研究
吸塵器 BLDC 馬達驅動板設計與高精度位置傳感方案-艾畢勝電子
吸塵器用 BLDC 馬達驅動板關鍵電路設計

探索LTC3202:低噪聲、高效率的白光LED電荷泵
其利天下吸塵器無刷電機控制方案
智能吸塵器 BLDC 電機 FOC/SVPWM 驅動控制優化研究:解鎖清潔新境界
無刷直流電機在車載吸塵器馬達驅動方案中的應用:突破效率與響應瓶頸
智能吸塵器無刷電機驅動方案:高能效、長壽命與低噪聲實現
面向手持吸塵器的高效FOC驅動系統:優化真空效率與整機能效
手持吸塵器多模式自適應電機控制與湍流抑制驅動方案



 工商網監
工商網監
評論