") 霍爾/AMR/TMR磁傳感在吸塵器電機(jī)控制中的應(yīng)用研究
霍爾/AMR/TMR磁傳感在吸塵器電機(jī)控制中的應(yīng)用研究

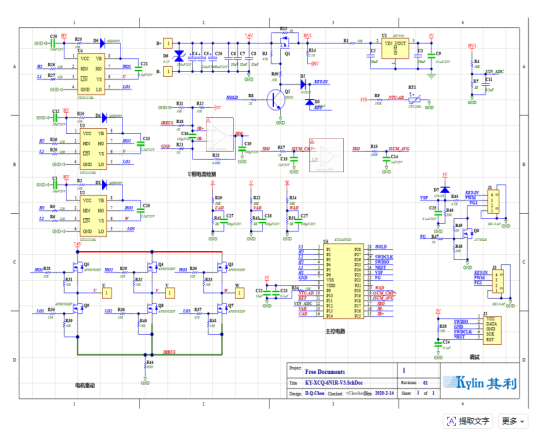
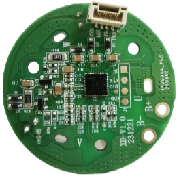
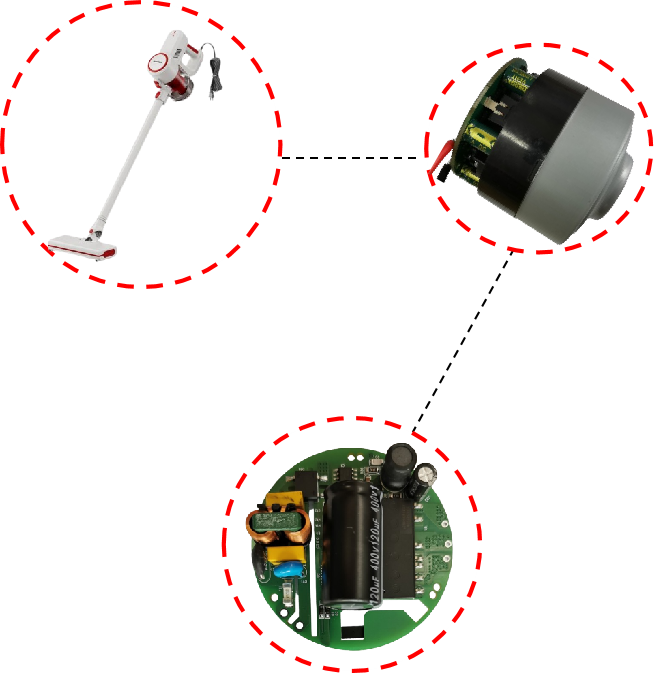
一、無(wú)線吸塵器馬達(dá)驅(qū)動(dòng)板的核心性能取決于BLDC電機(jī)的動(dòng)態(tài)響應(yīng)、能效與靜音表現(xiàn),而轉(zhuǎn)子位置傳感是驅(qū)動(dòng)控制的關(guān)鍵。吸塵器面臨高速(40000–120000 r/min)、粉塵振動(dòng)、寬溫域(-20℃至125℃)及電池低功耗等嚴(yán)苛工況,傳統(tǒng)霍爾傳感已難以滿足高端機(jī)型的FOC控制需求。AMR(各向異性磁阻)與TMR(隧道磁阻)技術(shù)憑借更高精度、靈敏度與穩(wěn)定性,成為中高端方案的核心選擇。本文對(duì)比三種磁傳感技術(shù)的原理與性能,結(jié)合吸塵器電機(jī)控制場(chǎng)景提出適配方案與集成要點(diǎn),為產(chǎn)品分級(jí)設(shè)計(jì)提供依據(jù)。
二、三種磁傳感技術(shù)原理與核心性能對(duì)比 霍爾傳感器基于洛倫茲力產(chǎn)生的霍爾電壓檢測(cè)磁場(chǎng),結(jié)構(gòu)簡(jiǎn)單、成本低,適合六步換相;AMR利用坡莫合金電阻隨磁化方向變化的特性,靈敏度較霍爾提升約20倍,需Set/Reset線圈校準(zhǔn);TMR基于量子隧穿效應(yīng),電阻變化率達(dá)100%–300%,無(wú)需校準(zhǔn)線圈,精度與功耗最優(yōu)。
核心性能對(duì)比如下: | 性能指標(biāo) | 霍爾傳感器 | AMR傳感器 | TMR傳感器 |
|----------------|------------------|------------------|-------------------|
| 角度精度 | ±1°–±3° | ±0.1°–±0.5° | ±0.05°–±0.1° |
| 分辨率 | 開(kāi)關(guān)量/低位數(shù) | 14位絕對(duì)角度 | 16位絕對(duì)角度 | | 響應(yīng)帶寬 | <100 kHz | 1–5 MHz | >5 MHz |
| 靜態(tài)功耗 | 5–20 mA | 0.5–2 mA | 0.1–0.5 mA | | 抗干擾性 | 一般(易受EMI) | 強(qiáng)(飽和區(qū)工作) | 極強(qiáng)(量子級(jí)靈敏)|
| 成本 | 極低 | 中 | 中高 | | 適配控制策略 | 六步換相 | FOC/高精度六步 | 高端FOC/弱磁控制 |
三、吸塵器電機(jī)控制場(chǎng)景的適配應(yīng)用
(一)霍爾傳感:中低端機(jī)型的成本優(yōu)選 采用3個(gè)霍爾元件按120°電角度布局,配合六步換相法,適用于30000 r/min以下的中低端吸塵器。核心設(shè)計(jì)要點(diǎn):選用鎖存型霍爾(如A3144),磁鋼氣隙控制在2–3 mm;通過(guò)定時(shí)器捕獲脈沖頻率測(cè)速,采樣周期100 μs,轉(zhuǎn)速波動(dòng)率可控制在±2%以內(nèi)。優(yōu)勢(shì)是成本低、外圍電路簡(jiǎn)單,缺點(diǎn)是轉(zhuǎn)矩脈動(dòng)大、高速下?lián)Q相誤差顯著,僅滿足基礎(chǔ)清潔需求。
(二)AMR傳感:中端機(jī)型的性能均衡方案 AMR傳感器工作在磁飽和區(qū),抗粉塵與EMI能力強(qiáng),適配40000–80000 r/min的中端機(jī)型FOC控制。選用集成磁編碼器(如MT6816),提供14位絕對(duì)角度與可編程ABZ輸出,支持SPI直讀位置,無(wú)需脈沖計(jì)數(shù)。設(shè)計(jì)要點(diǎn):磁鋼與芯片間距1.5–2 mm,內(nèi)置溫度補(bǔ)償?shù)窒麥仄煌ㄟ^(guò)Set/Reset脈沖消除磁滯,確保全溫區(qū)精度≤±0.3°。實(shí)測(cè)表明,AMR方案可使轉(zhuǎn)矩脈動(dòng)降至5%以下,噪音較霍爾方案降低3 dB(A),兼顧性能與成本。
(三)TMR傳感:高端機(jī)型的極致性能之選 TMR憑借量子級(jí)靈敏度與μA級(jí)功耗,成為80000 r/min以上高端吸塵器的核心方案,適配高速弱磁控制與毫秒級(jí)負(fù)載響應(yīng)。選用16位磁編碼器(如AS5048B),角度更新時(shí)間0.5 μs,檢測(cè)誤差±0.05°,支持2 MHz采樣頻率。核心優(yōu)勢(shì):無(wú)需校準(zhǔn)線圈,體積更小;低功耗設(shè)計(jì)延長(zhǎng)續(xù)航;高速下位置抖動(dòng)≤±0.1°,確保弱磁響應(yīng)時(shí)間≤1 ms。搭配模型預(yù)測(cè)控制(MPC),負(fù)載突變時(shí)轉(zhuǎn)速恢復(fù)時(shí)間≤12 ms,轉(zhuǎn)矩脈動(dòng)≤3.5%,滿足地毯強(qiáng)吸、大顆粒吸入等復(fù)雜工況需求。
四、集成設(shè)計(jì)要點(diǎn)與可靠性優(yōu)化
1. 磁路與機(jī)械設(shè)計(jì):統(tǒng)一采用軸端貼釹鐵硼磁鋼,霍爾方案氣隙≤3 mm,AMR/TMR≤2 mm;傳感器PCB垂直布局,減少安裝偏心誤差。 2. EMC優(yōu)化:AMR/TMR信號(hào)線采用差分走線或屏蔽雙絞線,與功率線間距≥5 mm;兩端并聯(lián)100 pF去耦電容,抑制高頻干擾。 3. 算法補(bǔ)償:霍爾方案采用換相點(diǎn)校準(zhǔn),補(bǔ)償安裝誤差;AMR/TMR方案引入自適應(yīng)卡爾曼濾波,平滑高速位置信號(hào),結(jié)合電角度校準(zhǔn)表,將誤差降至±0.1°以內(nèi)。 4. 可靠性保障:全方案滿足-40℃至125℃寬溫工作,TMR方案通過(guò)AEC-Q100認(rèn)證;增加傳感器冗余設(shè)計(jì),提升故障容錯(cuò)能力。
五、結(jié)論
霍爾、AMR、TMR三種磁傳感技術(shù)形成清晰的產(chǎn)品分級(jí)適配體系:霍爾適用于中低端六步換相機(jī)型,追求成本最優(yōu);AMR是中端FOC機(jī)型的均衡選擇,兼顧性能與成本;TMR則為高端機(jī)型提供極致動(dòng)態(tài)響應(yīng)與精度,適配高速?gòu)?fù)雜工況。在吸塵器電機(jī)控制中,應(yīng)根據(jù)產(chǎn)品定位、轉(zhuǎn)速需求與成本預(yù)算,結(jié)合磁路設(shè)計(jì)、EMC優(yōu)化與算法補(bǔ)償,實(shí)現(xiàn)傳感方案與驅(qū)動(dòng)系統(tǒng)的深度協(xié)同。未來(lái),隨著TMR成本下降與集成度提升,其將逐步向中端機(jī)型滲透,推動(dòng)吸塵器行業(yè)向更高能效、更靜音、更智能的方向發(fā)展。
-
電機(jī)控制
+關(guān)注
關(guān)注
3600文章
2134瀏覽量
277824 -
馬達(dá)驅(qū)動(dòng)
+關(guān)注
關(guān)注
2文章
142瀏覽量
20869 -
敏磁傳感
+關(guān)注
關(guān)注
0文章
3瀏覽量
1059
發(fā)布評(píng)論請(qǐng)先 登錄
麥歌恩AMR/TMR磁編碼器核心原理與高精度位置檢測(cè)技術(shù)
其利天下高性能吸塵器驅(qū)動(dòng)方案如何實(shí)現(xiàn)更強(qiáng)吸力與智能保護(hù)?

其利天下吸塵器無(wú)刷電機(jī)控制方案
為什么要擁抱無(wú)刷吸塵器——【其利天下】
無(wú)刷吸塵器在吸塵器領(lǐng)域帶來(lái)了革命性的提升,其優(yōu)勢(shì)是全方位的【其利天下】
智能吸塵器 BLDC 電機(jī) FOC/SVPWM 驅(qū)動(dòng)控制優(yōu)化研究:解鎖清潔新境界
手持吸塵器多模式自適應(yīng)電機(jī)控制與湍流抑制驅(qū)動(dòng)方案
集成化PCBA:實(shí)現(xiàn)吸塵器電機(jī)驅(qū)動(dòng)、保護(hù)與智能管理的一體化方案
多維科技TMR陣列電流傳感器在電機(jī)控制中的電流檢測(cè)應(yīng)用

中微半導(dǎo)無(wú)刷電機(jī)吸塵器解決方案介紹

霍爾傳感器在直流電機(jī)轉(zhuǎn)速測(cè)量中的應(yīng)用研究
新品推薦 | MOS管在吸塵器產(chǎn)品上的應(yīng)用

壓力傳感器AS6295在智能吸塵器中的作用

高效率為主低噪為輔:其利天下無(wú)刷吸塵器驅(qū)動(dòng)方案

吸塵器“心臟”革命!仁懋TOLL技術(shù)重塑吸塵器動(dòng)力




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論