") 使用極海APM32M3514無感FOC控制方式快速調(diào)轉(zhuǎn)電機(jī)
使用極海APM32M3514無感FOC控制方式快速調(diào)轉(zhuǎn)電機(jī)

《APM32芯得》系列內(nèi)容為用戶使用APM32系列產(chǎn)品的經(jīng)驗(yàn)總結(jié),均轉(zhuǎn)載自21ic論壇極海半導(dǎo)體專區(qū),全文未作任何修改,未經(jīng)原文作者授權(quán)禁止轉(zhuǎn)載。
1. 概述
定義:FOC是一種通過解耦電機(jī)定子電流的磁場(chǎng)分量(d軸)和轉(zhuǎn)矩分量(q軸),實(shí)現(xiàn)高性能電機(jī)控制的技術(shù)。
核心目標(biāo):模擬直流電機(jī)的控制特性,實(shí)現(xiàn)交流電機(jī)的高效、低噪、寬調(diào)速控制。
別名:矢量控制(Vector Control)。
2. 無感FOC核心原理
磁場(chǎng)定向:將三相電流(ABC坐標(biāo)系)通過坐標(biāo)變換分解為:
d軸電流(Id):產(chǎn)生磁場(chǎng)的分量(勵(lì)磁分量)。
q軸電流(Iq):產(chǎn)生轉(zhuǎn)矩的分量(轉(zhuǎn)矩分量)。
坐標(biāo)變換:
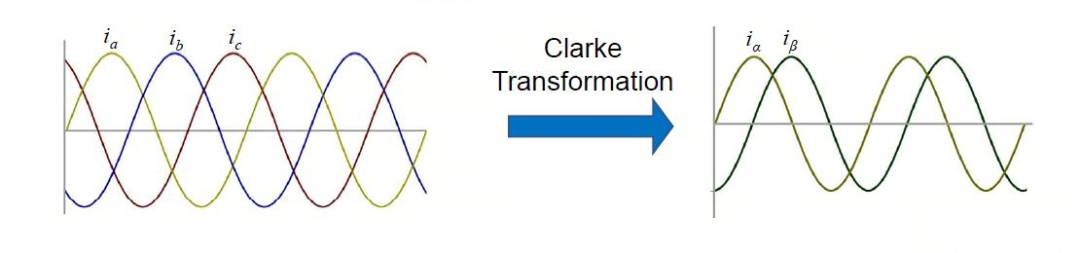
Clark變換:三相靜止坐標(biāo)系(ABC)→ 兩相靜止坐標(biāo)系(αβ)。
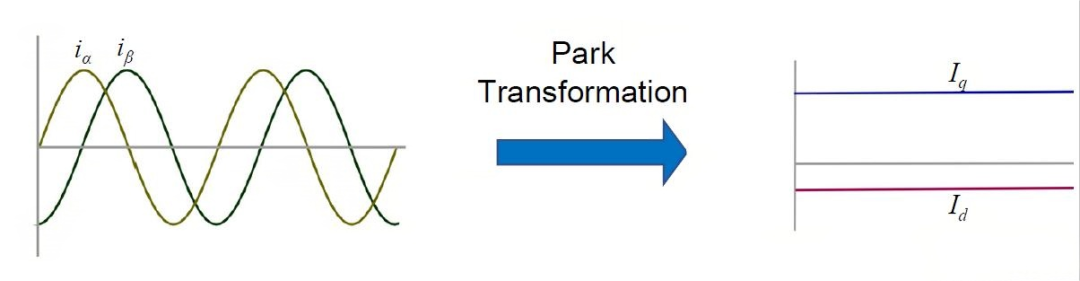
Park變換:兩相靜止坐標(biāo)系(αβ)→ 旋轉(zhuǎn)坐標(biāo)系(dq,與轉(zhuǎn)子磁場(chǎng)同步)。
逆變換:將控制后的dq軸信號(hào)還原為三相電壓信號(hào)(逆變器驅(qū)動(dòng))。
3. 關(guān)鍵步驟
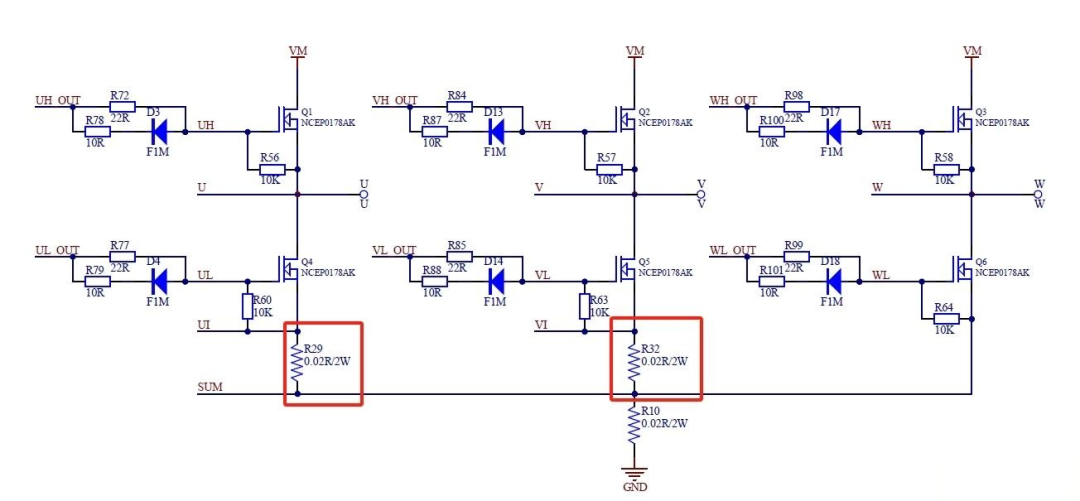
1. 電流采樣:測(cè)量電機(jī)三相電流。一般有單電阻,雙電阻和三電阻三種電流檢測(cè)方式進(jìn)行測(cè)量。APM32M3514_MOTOR EVAL使用R29、R32雙電阻進(jìn)行U、V兩相電流采樣,通過計(jì)算得到W相電流。
2. 坐標(biāo)變換(Clark + Park):
依賴轉(zhuǎn)子位置信息電角度(編碼器、霍爾傳感器或無傳感器估算)。APM32M3514使用SMO+PLL方式獲取轉(zhuǎn)子位置。
Clark變換:通過Clarke變換將測(cè)得的電機(jī)相電流Ia,Ib,Ic轉(zhuǎn)換為αβ參考坐標(biāo)系中的兩個(gè)正交分量Iα和Iβ。
Park 變換:使用估算的轉(zhuǎn)子磁通角通過Park 變換將αβ轉(zhuǎn)換為dq參考坐標(biāo)系中的兩個(gè)正交分量。
3. PI控制:
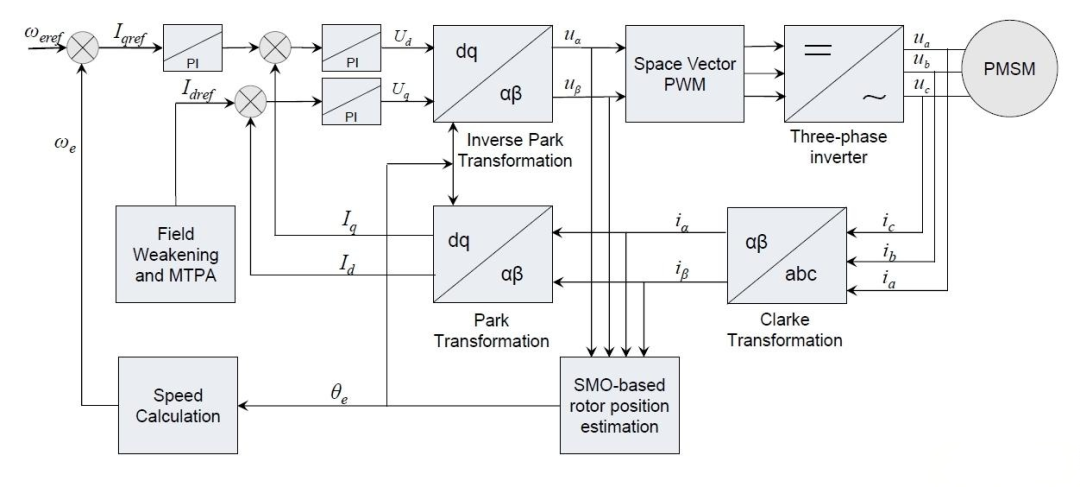
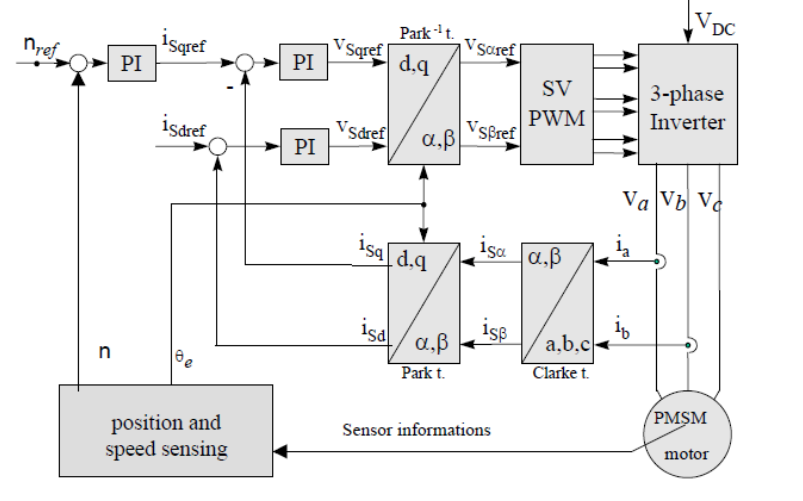
獨(dú)立控制Id(通常設(shè)為0以實(shí)現(xiàn)最大轉(zhuǎn)矩)和Iq(響應(yīng)轉(zhuǎn)矩需求)。由上圖可以明顯得到電流環(huán)目標(biāo)Iqref是由速度環(huán)PI控制的到的結(jié)果,以滑膜觀測(cè)得到的速度與設(shè)定的目標(biāo)轉(zhuǎn)速進(jìn)行誤差運(yùn)算得到。Id一般在不考慮MTPA和弱磁算法時(shí),一般輸出給定為0。
4. 逆Park變換 + SVPWM:
將dq參考坐標(biāo)系中的校正電壓轉(zhuǎn)換回abc參考坐標(biāo)系中的電壓。通過一些功率切換技術(shù)將這些電壓施加到電機(jī)端子,生成逆變器開關(guān)信號(hào)。
空間矢量脈寬調(diào)制(Space Vector Pulse Width Modulation, SVPWM)是驅(qū)動(dòng)兩級(jí)電壓源逆變器的傳統(tǒng)技術(shù),具有以下優(yōu)勢(shì):
? 改善相電壓的諧波內(nèi)容
? 將直流總線利用范圍提高約15%
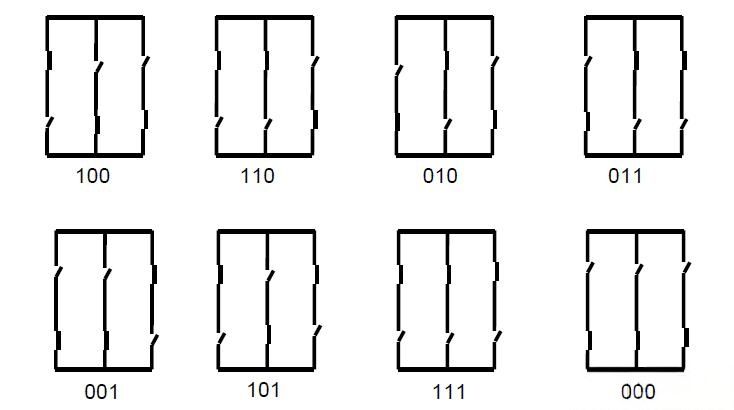
逆變器每相輸出可以是兩種狀態(tài)中的任一種:連接到負(fù)電源軌時(shí)為0,連接到正電源軌時(shí)為1。因此,三相逆變器可以有23 = 8 種可能的狀態(tài),如下圖所示:
5. 轉(zhuǎn)子位置反饋:
有傳感器:編碼器、旋變。
無傳感器:滑模觀測(cè)器(SMO)、模型參考自適應(yīng)(MRAS)、高頻注入(HFI)。
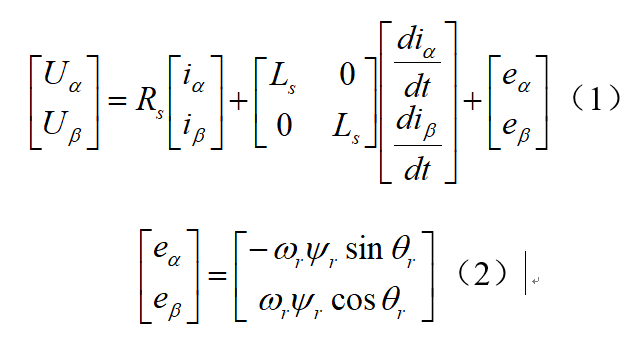
滑模觀測(cè)器(SMO)是一種非線性觀測(cè)器,用于根據(jù)測(cè)得的輸入和輸出估算可觀測(cè)系統(tǒng)的內(nèi)部狀態(tài)。在此應(yīng)用中,SMO 用于估算PMSM 的反電動(dòng)勢(shì)。與傳統(tǒng)線性反電動(dòng)勢(shì)轉(zhuǎn)子位置和速度估算相比,使用SMO 的主要優(yōu)勢(shì)在于,當(dāng)存在未知信號(hào)和不確定性時(shí),SMO 的穩(wěn)健性極高
想具體了解滑膜觀測(cè)器如何實(shí)現(xiàn),可參考這份博客:https://zhuanlan.zhihu.com/p/416224632
4. 優(yōu)勢(shì)
高性能:寬調(diào)速范圍、快速動(dòng)態(tài)響應(yīng)(如零速滿轉(zhuǎn)矩啟動(dòng))。
高效率:最小化銅損和鐵損。
低振動(dòng)/噪音:平滑轉(zhuǎn)矩輸出。
兼容性:適用于永磁同步電機(jī)(PMSM)、無刷直流電機(jī)(BLDC)等。
5. 挑戰(zhàn)與解決方案
依賴轉(zhuǎn)子位置:
傳感器成本高 → 無傳感器FOC。
低速精度差 → 高頻注入法。
參數(shù)敏感性:電機(jī)參數(shù)(電阻、電感)變化影響性能 → 在線參數(shù)辨識(shí)。
計(jì)算復(fù)雜度:需實(shí)時(shí)處理坐標(biāo)變換和PID → 高性能MCU(DSP)。
6. 對(duì)比其他控制方法

7. 總結(jié)
無傳感器FOC:降低成本,提高可靠性。
AI優(yōu)化:自適應(yīng)PID參數(shù)整定。
集成化:SoC 簡(jiǎn)化開發(fā)。
原文地址:https://bbs.21ic.com/icview-3461244-1-1.html?_dsign=ac52e11b
或點(diǎn)擊下方閱讀原文跳轉(zhuǎn)
-
電機(jī)控制
+關(guān)注
關(guān)注
3600文章
2131瀏覽量
277663 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9587瀏覽量
154050 -
FOC
+關(guān)注
關(guān)注
21文章
389瀏覽量
46198
原文標(biāo)題:APM32芯得 EP.70 | 基于3514無感FOC控制方式快速調(diào)轉(zhuǎn)電機(jī)(一)-- FOC介紹
文章出處:【微信號(hào):geehysemi,微信公眾號(hào):Geehy極海半導(dǎo)體】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
正式發(fā)布丨極海首款電機(jī)控制專用微控制器APM32F035,助力用戶產(chǎn)品快速迭代煥新
極海電機(jī)產(chǎn)品線再添新品,APM32M3514系列電機(jī)控制專用SoC正式發(fā)布!

CW32F030C8T7永磁同步電機(jī)無感FOC控制的方案
笙泉BLDC MCU: 應(yīng)用于FOC無感控制
無感FOC的控制原理詳細(xì)資料說明
電機(jī)產(chǎn)品線上新 極海APM32M3514電機(jī)控制專用SoC
極海半導(dǎo)體推出APM32M3514系列電機(jī)控制專用SoC
極海APM32M3514斬獲“2024年度電機(jī)控制器十大主控芯片”獎(jiǎng)
基于Geehy極海半導(dǎo)體APM32M3514電機(jī)通用評(píng)估板使用介紹




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論