") 伺服控制要 “集成 + 靈活”?TMC4671:硬件實現(xiàn) FOC,還支持前饋補償!
伺服控制要 “集成 + 靈活”?TMC4671:硬件實現(xiàn) FOC,還支持前饋補償!

TMC4671:硬件實現(xiàn)FOC
伺服控制要 “集成 + 靈活”?
做伺服項目時,大家總希望芯片既能裝下核心功能,又能應(yīng)對不同電機需求 —— 而 TMC4671 這款完全集成的伺服控制芯片,剛好踩中了 “集成” 與 “靈活” 這兩個關(guān)鍵點,還靠硬件直接實現(xiàn)磁場定向控制(FOC)。今天咱們就對著產(chǎn)品核心信息,聊聊它怎么滿足這些需求~
核心的特點
TMC4671 最核心的特點,是把伺服控制需要的關(guān)鍵功能全做進硬件里,不用額外外接模塊 “湊功能”:
控制核心集成:直接硬件實現(xiàn) FOC(磁場定向控制),連轉(zhuǎn)矩、速度、位置三種控制模式都包含在內(nèi),不用靠軟件額外開發(fā)控制邏輯,響應(yīng)速度更穩(wěn);
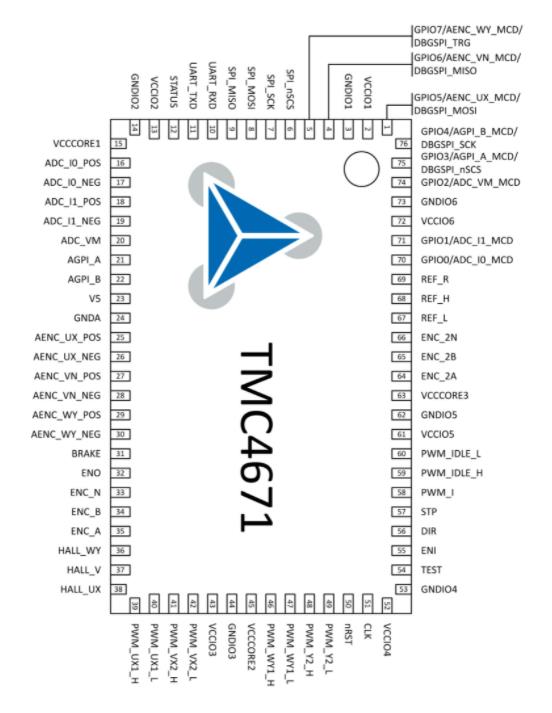
信號檢測集成:內(nèi)置△∑ADCs,既能測電流檢測電壓、電機電源電壓,還能接模擬編碼器信號;甚至帶外部△∑調(diào)節(jié)接口,信號檢測不用再單配 ADC 模塊;
反饋接口集成:位置傳感器接口直接兼容多種類型 —— 數(shù)字增量編碼器(ABN、ABZ,最高支持 5MHz)、第二路數(shù)字編碼器(雙反饋)、數(shù)字霍爾(帶臨時位置插補)、模擬編碼器 / 模擬霍爾(支持 0°/90° 或 0°/120°/240° 信號),連位置差值器也集成了,不用再設(shè)計單獨的反饋電路;
輔助功能集成:32 位多圈位置計數(shù)器、目標值雙階濾波、積分電路結(jié)尾保護、可編程電壓循環(huán)向?qū)拗破鳎@些保障精度和安全的功能,也不用額外搭電路實現(xiàn)。
簡單說:以前需要 4-5 個外接模塊才能實現(xiàn)的 “控制 + 檢測 + 反饋 + 保護”,現(xiàn)在 TMC4671 單芯片就能搞定,電路板空間能省不少,接線故障風險也低了。
多電機 + 可調(diào)參數(shù)
“集成” 不代表 “死板”,TMC4671 在適配性上很靈活,能應(yīng)對多種電機和調(diào)試需求:
電機適配靈活:不是只認一種電機 —— 能給三相永磁同步伺服電機(FOC3)、兩相步進伺服電機(FOC2)、直流有刷電機 / 音圈電機(DC1)、無刷直流電機(BLDC)提供 FOC 控制,比如生產(chǎn)線既用步進電機定位,又用 PMSM 電機傳動,不用換芯片;
控制模式靈活:除了轉(zhuǎn)矩 / 速度 / 位置三種基礎(chǔ)控制模式,還支持前饋控制輸入 —— 包括目標值前饋補償、前饋摩擦補償,甚至能通過 “可編程斬波” 調(diào)節(jié)中期結(jié)果的輸入輸出,比如物料搬運要控轉(zhuǎn)矩、傳送帶要控速度,切換時不用大改硬件;
PWM 參數(shù)靈活:PWM 引擎頻率能在 20KHz-100KHz 之間編程調(diào)節(jié),還支持可編程 BBM(Brake-Before-Make)時間 —— 從 0ns 到 2.5μs,按 10ns 步長調(diào),比如對噪音敏感的設(shè)備,調(diào)小 BBM 時間就能優(yōu)化驅(qū)動效果;
初始化靈活:帶高級編碼器初始化算法,支持霍爾傳感器或最小移動初始化,不用每次調(diào)試都重新校準位置,省了不少調(diào)試時間。
集成 + 靈活的實際用武之地
因為這兩個特點,TMC4671 能適配不少伺服場景:
工業(yè)自動化:比如精密機床,既用 PMSM 電機驅(qū)動主軸(要速度穩(wěn)定),又用步進電機控制進給(要位置精準),單芯片就能控,還靠集成 ADCs 保證電流檢測精度;
機器人:關(guān)節(jié)電機用 PMSM,抓取機構(gòu)用音圈電機,雙反饋接口能提升位置精度,前饋控制能優(yōu)化軌跡跟蹤效果;
醫(yī)療設(shè)備:比如精密診斷儀器,直流有刷電機帶動傳動部件,靠硬件 FOC 保證運行平穩(wěn),集成保護功能避免設(shè)備異常。
不同場景怎么選?
選型小參考:你的項目適合它嗎?
如果你的項目符合這些產(chǎn)品特性對應(yīng)的需求,可以重點看:
需要控制多種電機(比如步進 + PMSM、BLDC + 音圈電機),不想分多套控制電路;
希望減少外接 ADC、編碼器接口模塊,節(jié)省電路板空間;
對控制刷新頻率有要求(電流 / 速度 / 位置控制刷新可配,PWM 最高 100KHz);
需要雙編碼器反饋、多圈位置計數(shù)這類提升精度的功能。
如果你在看TMC4671,或者糾結(jié)伺服芯片選型,想確認它能不能適配你的電機類型、控制需求,歡迎聯(lián)系我們
我們會根據(jù)你提供的項目細節(jié)(比如電機型號、控制精度要求、是否需要雙反饋),結(jié)合TMC4671的硬件特性和參數(shù),給你針對性的選型建議,甚至協(xié)助調(diào)試,讓你少走彎路。
有疑問也可以在評論區(qū)留言,我們會及時回復~
-
電機
+關(guān)注
關(guān)注
143文章
9615瀏覽量
154227 -
伺服控制
+關(guān)注
關(guān)注
5文章
160瀏覽量
24679 -
FOC
+關(guān)注
關(guān)注
21文章
390瀏覽量
46247
發(fā)布評論請先 登錄
TMC4671基于硬件FOC伺服電機控制芯片適應(yīng)BLDC/PMSM、兩相步進、直流有刷、音圈電機
伺服控制芯片TMC4671性能概述
tmc4671控制方案分享 TMC4671+TMC6200設(shè)計正壓睡眠呼吸機

TMC4671驅(qū)動步進電機之tmc4671配置代碼與TMC4671模擬編碼器設(shè)置

硬件FOC伺服控制芯片TMC4671編碼器相序整定代碼
TMC4671硬件FOC伺服控制芯片PID自動調(diào)整方法
TMC4671應(yīng)用簡介功能描述
德國TRINAMIC硬件伺服FOC控制芯片TMC4671力矩環(huán)速度環(huán)位置環(huán)PI配置方法
TMC4671相關(guān)資料分享
伺服驅(qū)控芯片TMC4671-ES相關(guān)資料分享
TMC4671基于硬件FOC伺服電機控制芯片適應(yīng)BLDC_PMSM、兩相步進、直流有刷、音圈電機
TMC4671基于硬件FOC伺服電機控制芯片適應(yīng)BLDC/PMSM等
TMC4671基于硬件FOC伺服電機控制芯片適應(yīng)BLDCPMSM、兩相步進、直流有刷、音圈電機

【開獎】小白福音:電機開發(fā)利器——ADI TMC4671套件評測

TMC4671的優(yōu)缺點與tmc4671原理圖一文講解



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論