 強實時運動控制內核MotionRT750(十):運動控制中的微調軌跡動態補償
強實時運動控制內核MotionRT750(十):運動控制中的微調軌跡動態補償

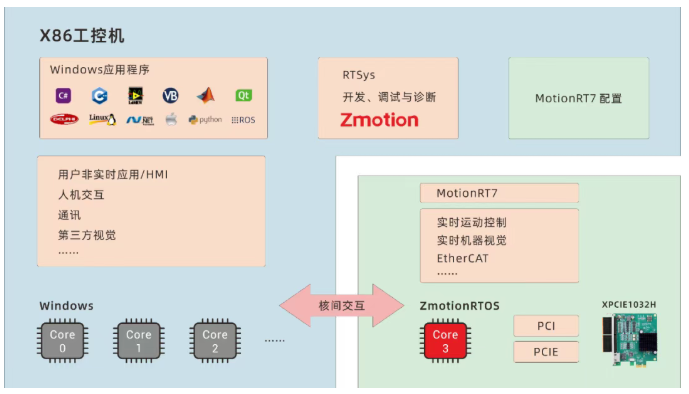
強實時運動控制內核MotionRT750
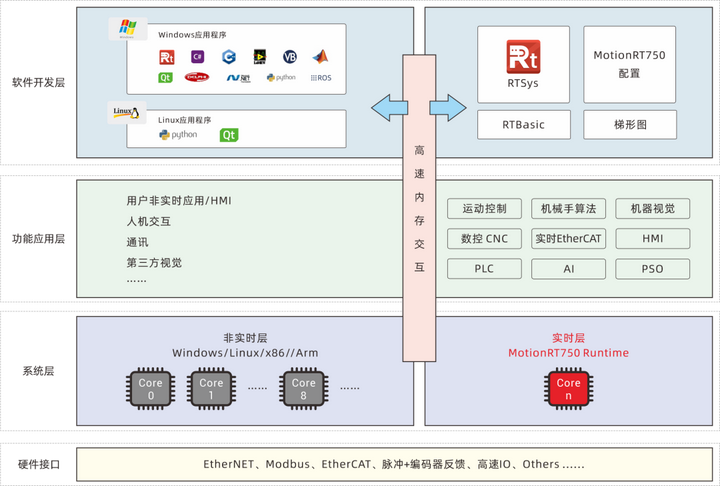
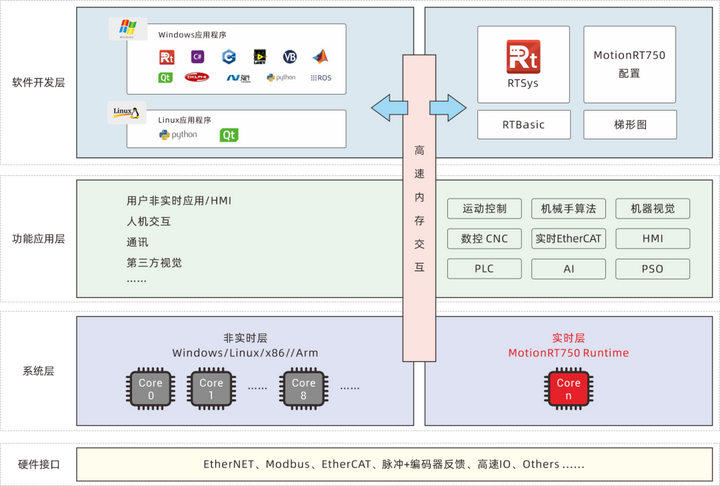
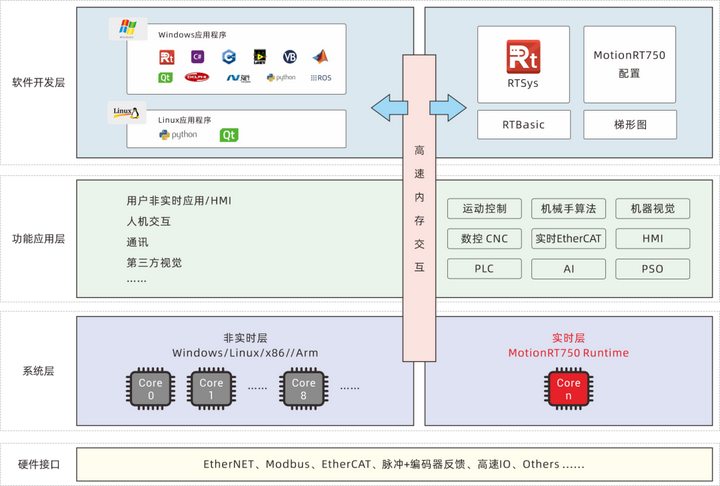
MotionRT750是正運動技術首家自主自研的x86架構Windows系統或Linux系統下獨占確定CPU的強實時運動控制內核。
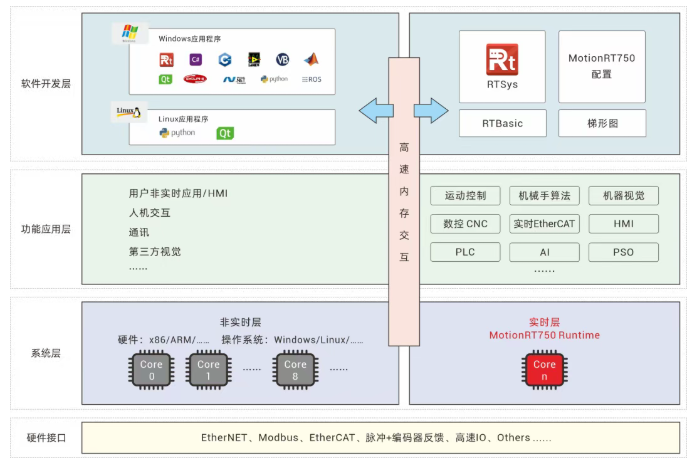
該方案采用獨占確定CPU內核技術實現超強性能的強實時運動控制。它將核心的運動控制、機器人算法、數控(CNC)及機器視覺等強實時的任務,集中運行在1-2個專用CPU核上。與此同時,其余CPU核則專注于處理Windows/Linux相關的非實時任務。
此外集成MotionRT750 Runtime實時層與操作系統非實時層,并利用高速共享內存進行數據交互,顯著提升了運動控制與上層應用間的通信效率及函數執行速度,最終實現更穩定、更高效的智能裝備控制,確保了運動控制任務的絕對實時性與系統穩定性,特別適用于半導體、電子裝備等高速高精的應用場合。
MotionRT750應用優勢:
1.跨平臺兼容性:支持Windows/Linux系統,適配不同等級CPU。
2.開發靈活性:提供多語言編程接口,便于二次開發與功能定制。
3.實時性提升:通過CPU內核獨占機制與高效LOCAL接口,實現2-3us指令交互周期,較傳統PCI/PCIe方案提速近20倍。
4.擴展能力強化:多卡多EtherCAT通道架構支持254軸運動控制及500usEtherCAT周期。
5.系統穩定性:32軸125us EtherCAT冗余架構消除單點故障風險,保障連續生產。
6.安全可靠性:不懼Windows系統崩潰影響,藍屏時仍可維持急停與安全停機功能有效,確保產線安全運行。
7.功能擴展性:實時內核支持C語言程序開發,方便功能拓展與實時代碼提升效率。
MotionRT750視頻介紹可點擊→正運動強實時運動控制內核MotionRT750。
更多關于MotionRT750的詳情介紹與使用點擊→強實時運動控制內核MotionRT750(一):驅動安裝、內核配置與使用。
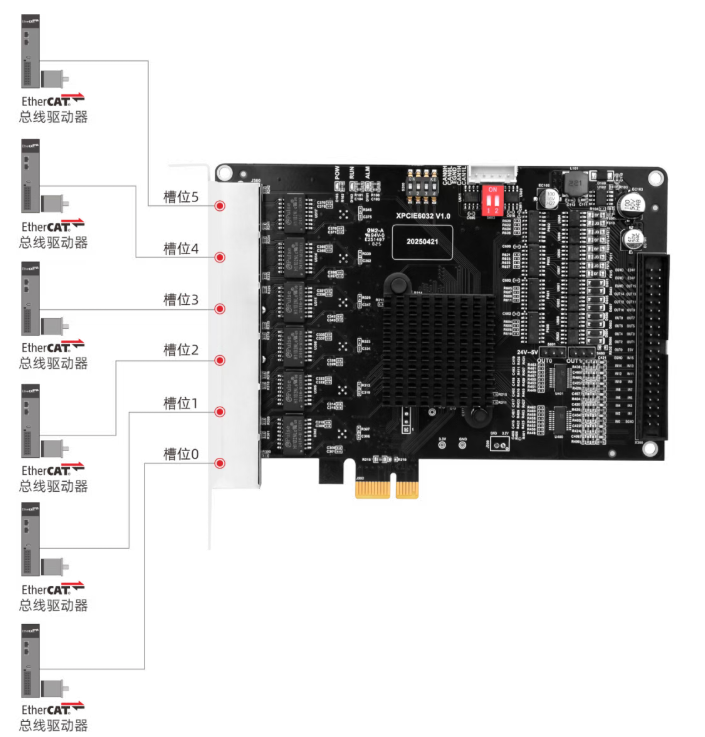
超實時EtherCAT運動控制卡XPCIE6032H
XPCIE6032H運動控制卡集成6路獨立EtherCAT主站接口。整卡最高可支持254軸運動控制;125usEtherCAT通訊周期時,兩個端口配置冗余最高可支持32軸運動控制。6個EtherCAT主站各通道獨立工作,多EtherCAT主站互不影響。
XPCIE6032H視頻介紹可點擊→全球首創!PCIe 6路高性能EtherCAT運動控制卡XPCIE6032H。
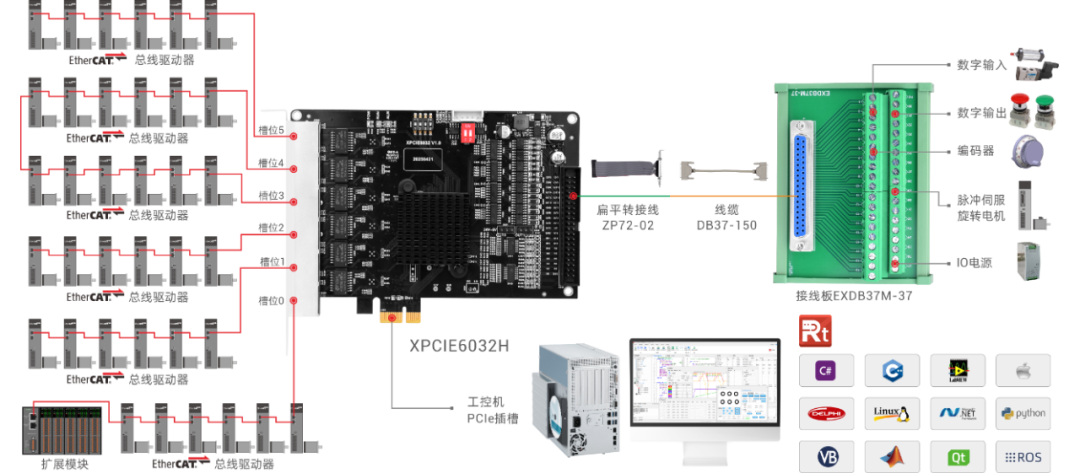
XPCIE6032H運動控制卡面向半導體設備、精密3C電子、生物醫療儀器、新能源裝備、人形機器人及激光加工等高速高精場景,為固晶機、貼片機、分選機、鋰電切疊一體機、高速異形插件設備等自動化裝備提供核心運動控制支持。
XPCIE6032H硬件特性:
1.EtherCAT通訊周期可到125us(需要主機性能與實時性足夠)。
2.板卡集成6路獨立的EtherCAT主站接口,最多可支持254軸運動控制。
3.搭載運動控制實時內核MotionRT750。
4.相較于傳統的PCI/PCIe、網口等通訊方式,速度可提升10-100倍以上。
5.板載16路高速輸入,16路高速輸出。
6.板載4路高速鎖存,4路通用PWM輸出。
更多關于XPCIE6032H的詳情介紹與使用點擊→全球首創!PCIe超實時6通道EtherCAT運動控制卡上市!。
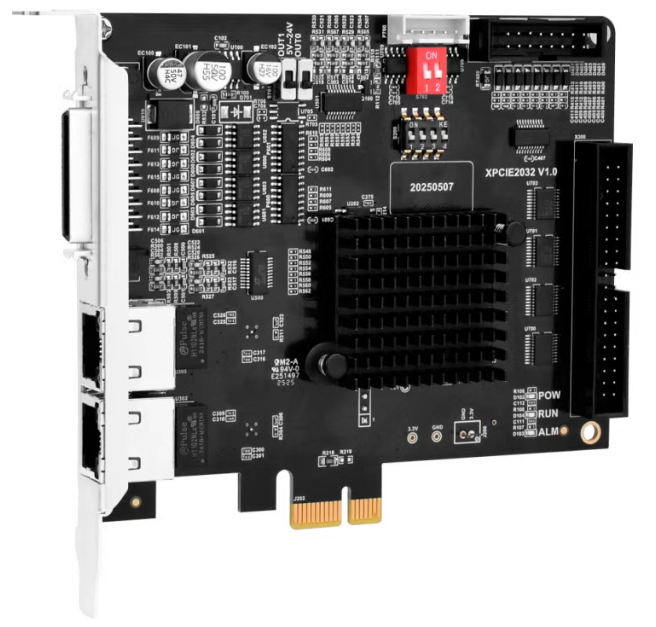
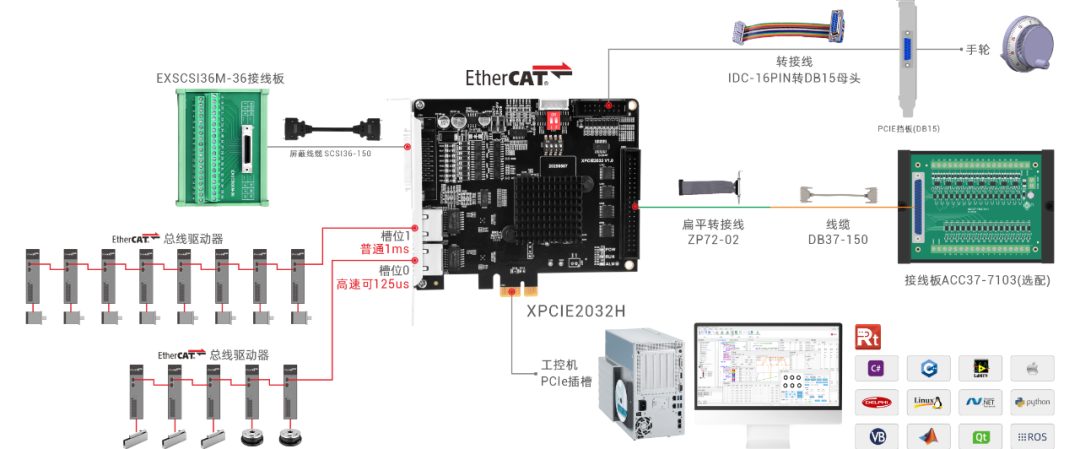
超實時EtherCAT運動控制卡XPCIE2032H
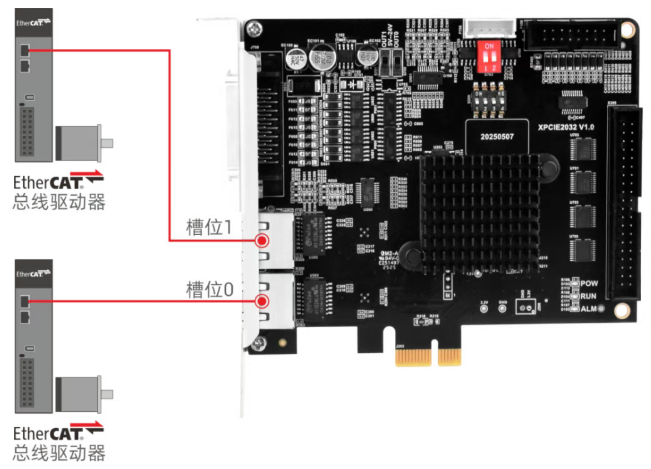
XPCIE2032H集成2路獨立EtherCAT接口。整卡最高可支持至254軸運動控制;125usEtherCAT通訊周期時,單接口最高可支持32軸運動控制。2個EtherCAT主站各通道獨立工作,多EtherCAT主站互不影響。
雙EtherCAT主站端口可任意設置為以下通道,且兩個端口也設置為不同類型通道:
● 高速通道-EtherCAT通訊周期125us
● 常規通道-EtherCAT通訊周期250us-8ms
XPCIE2032H視頻介紹可點擊→高速高精運動控制!PCIe超實時2通道EtherCAT運動控制卡上市!。
XPCIE2032H硬件特性:
1.EtherCAT通訊周期可到125us(需要主機性能與實時性足夠)。
2.板卡集成2路獨立的EtherCAT主站接口,最多可支持254軸運動控制。
3.搭載運動控制實時內核MotionRT750。
4.相較于傳統的PCI/PCIe、網口等通訊方式,速度可提升10-100倍以上。
5.板載8路高速輸入,16路高速輸出。
6.板載4路高速鎖存,4路通用PWM輸出。
更多關于XPCIE2032H的詳情介紹與使用點擊→高速高精運動控制!PCIe超實時2通道EtherCAT運動控制卡上市!。
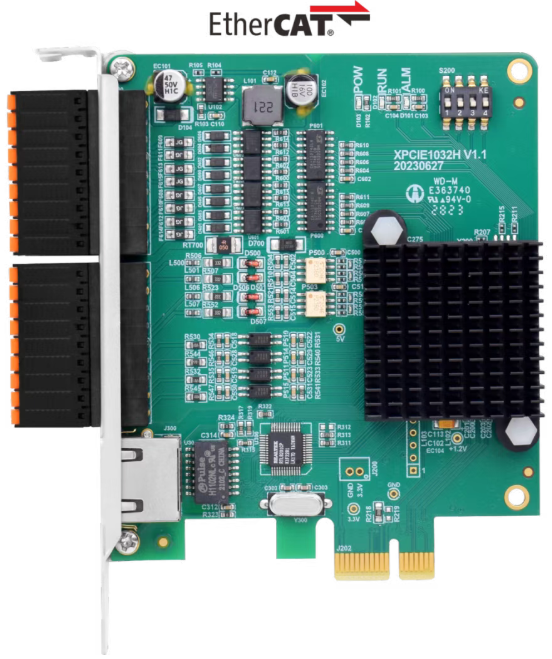
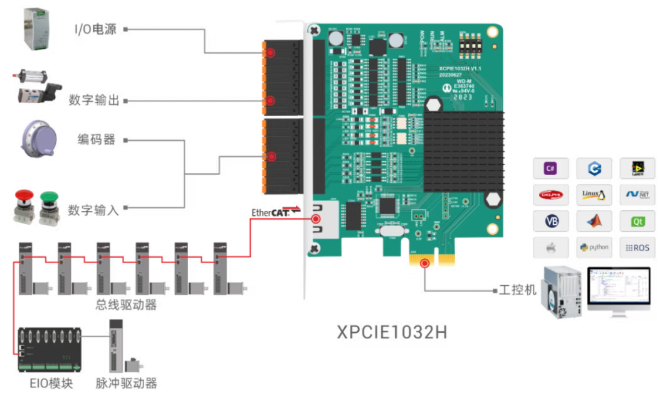
PCIe EtherCAT實時運動控制卡XPCIE1032H
XPCIE1032H是一款基于PCI Express的EtherCAT總線運動控制卡,可選6-64軸運動控制,支持多路高速數字輸入輸出,可輕松實現多軸同步控制和高速數據傳輸。
XPCIE1032H視頻介紹可點擊→高性能PCIe EtherCAT運動控制卡 | XPCIE1032H_。
XPCIE1032H運動控制卡集成了強大的運動控制功能,結合MotionRT7運動控制實時軟核,解決了高速高精應用中,PC Windows開發的非實時痛點,指令交互速度比傳統的PCI/PCIe快10倍。
XPCIE1032H硬件特性:
1.6-64軸EtherCAT總線+脈沖可選,其中4路單端500KHz脈沖輸出。
2.16軸EtherCAT同步周期500us,支持多卡聯動。
3.板載16點通用輸入,16點通用輸出,其中8路高速輸入和16路高速輸出。
4.通過EtherCAT總線,可擴展到512個隔離輸入或輸出口。
5.支持PWM輸出、精準輸出、PSO硬件位置比較輸出、視覺飛拍等。
6.支持直線插補、圓弧插補、連續軌跡加工(速度前瞻)。
7.支持電子凸輪、電子齒輪、位置鎖存、同步跟隨、虛擬軸、螺距補償等功能。
8.支持30+機械手模型正逆解模型算法,比如SCARA、Delta、UVW、4軸/5軸 RTCP...
更多關于XPCIE1032H詳情點擊“不止10倍提速!PCIe EtherCAT實時運動控制卡XPCIE1032H 等您評測!”查看。
市場背景
在實際應用場景中,我們經常能遇到一些精度上的補償問題,下面正運動給大家介紹幾種實際的應用場景,可以更好地解決一些場景應用的問題,無論是導軌的螺距分布不夠均勻,使運動位置不準確和螺距比較大的換向時軸旋轉不能立馬帶動機臺移動的現象,還是流水線傳送帶位置觸發不夠精準,或者機構上無可避免的固定偏差,運動中需要在已有的軌跡避免碰撞做一些微調。
那么接下來我們就來看一下如何通過正運動的指令來進行針對這四種場合的補償。
場景一 運動中微調軌跡補償(可手輪觸發)
應用描述:把主軸運動實時復制到從軸,并保留一個虛擬軸作為微調入口。CONNECT指令把軸0與軸1按1:1比例耦合,確保兩者位移、速度、加減速度一致;同時另設虛擬軸2,通過ADDAX將它的脈沖疊加到軸1,形成“主軸+補償”的復合軌跡。觸發源選用IN0的邊沿信號,上升沿正向補5脈沖,下降沿負向補5脈沖,實現手輪式即時修正,無需停機。
● Basic代碼如下:
'示例一:運動中微調軌跡補償 '適用同步場合或者非同步場合中操作,有些場合可以通過手輪運動微調軌跡,達到在運動中亦可輕微補償 BASE(0,1) ATYPE=1,1 UNITS=100,100 DPOS=0,0 SPEED=20,20 ACCEL=200,200 DECEL=200,200 TRIGGER '自動觸發示波器 CONNECT(1,0) AXIS(1) '軸0連接到軸1,比例為1 MOVE(100) AXIS(0) '軸1運動100,軸0運動100 BASE(2) ATYPE=0 UNITS=100 ADDAX(2) AXIS(1) '設置疊加的綁定軸,虛擬軸2疊加給實際軸1 WHILE 1 IF SCAN_EVENT(IN(0)) > 0 THEN 'IN0上升沿觸發 MOVE(5) AXIS(2) '在運動中微調同步軸1軌跡位置 ELSEIF SCAN_EVENT(IN(0)) < 0 THEN 'IN0下降沿觸發 MOVE(-5) AXIS(2) '在運動中微調同步軸1軌跡位置 ENDIF wend
● 具體指令內容:
①CONNECT-同步運動
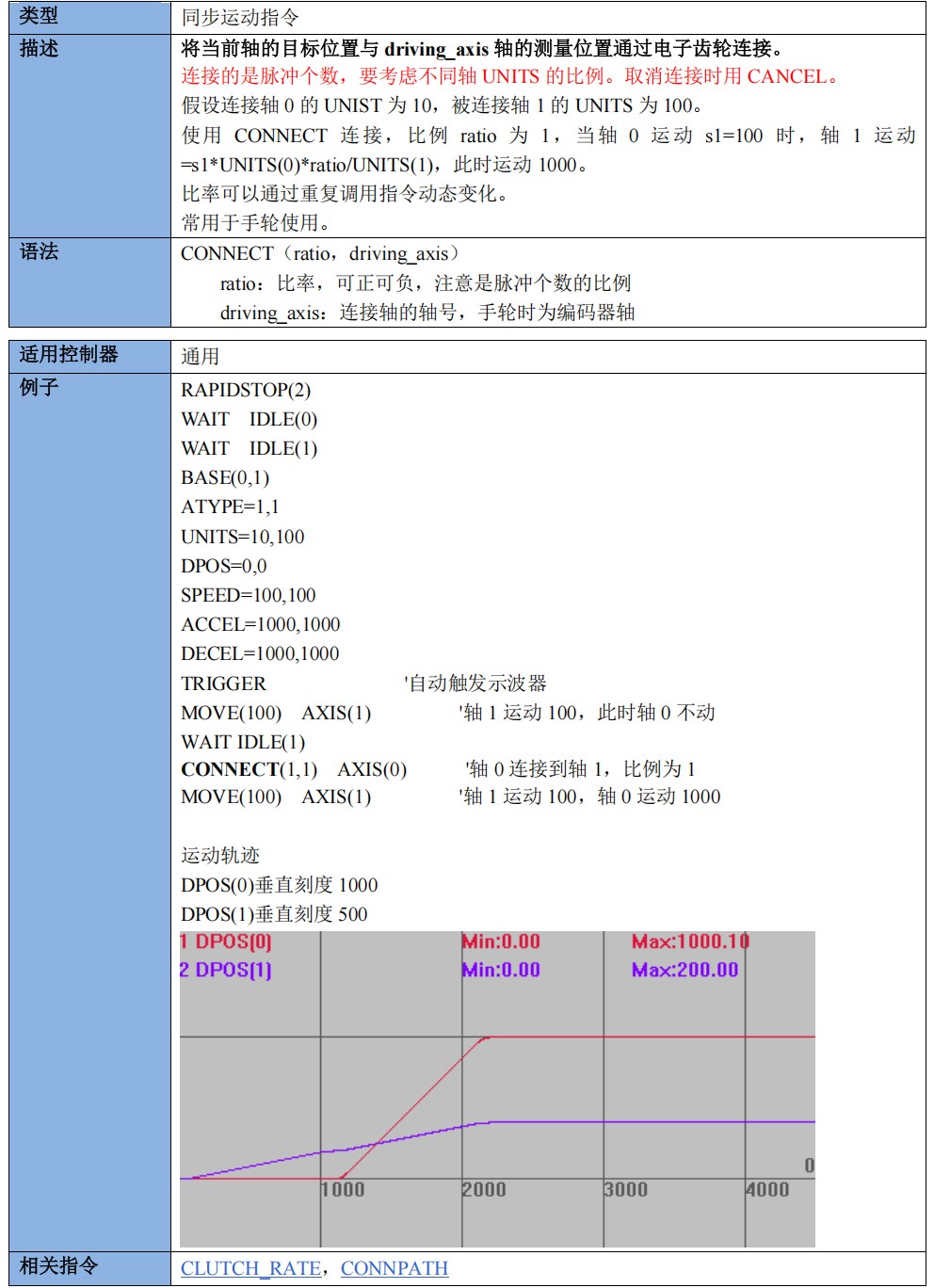
②ADDAX-運動疊加
● 效果如下:
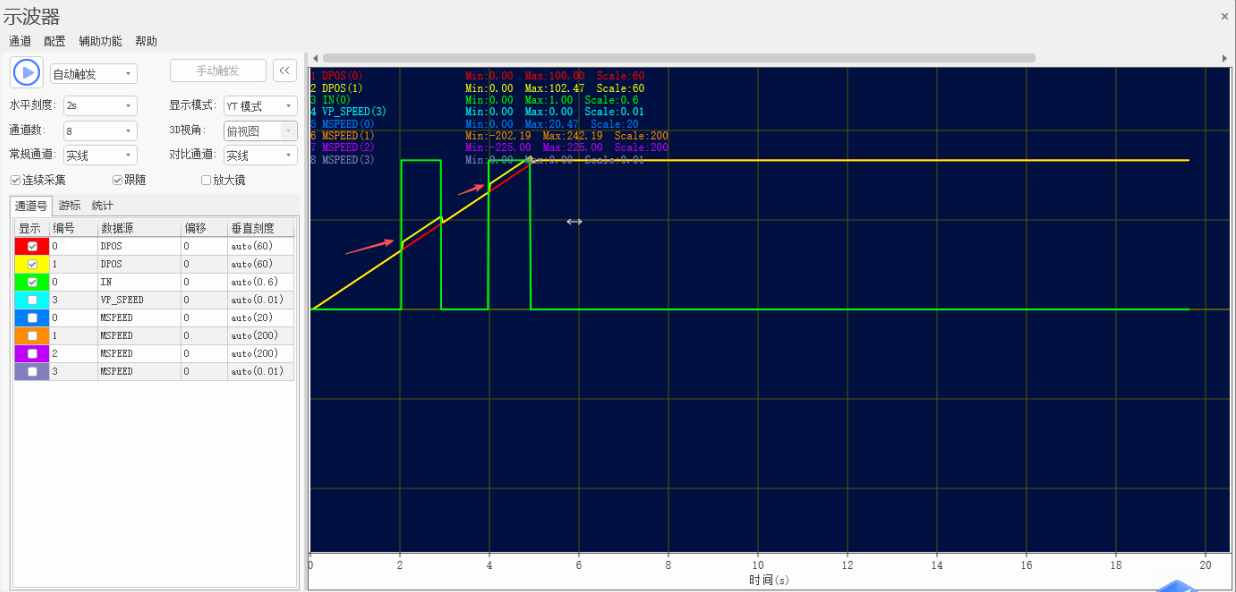
紅色箭頭部分即補償部分,WHILE循環內SCAN_EVENT監測IN0邊沿,MOVE(5)或MOVE(-5) AXIS(2)完成±5脈沖的瞬時疊加,實現運行中補償的效果。
場景二 激光測高Z軸追平
應用描述:激光測高設備通過通訊處理,把激光測出的高度與標準平面差值HighData通過串口實時送達控制器。控制器將軸3設為實際Z軸,軸4設為補償虛擬軸,ADDAX(4) AXIS(3)使補償脈沖直接疊加到Z軸。
當IN1上升或下降沿到達時,MOVEABS(HighData) AXIS(4)立即把激光測得的偏差寫入軌跡,相機在即將拍照瞬間完成焦平面自動對齊。
● Basic代碼如下:
'示例二:激光測高微調相機Z軸高度
'激光器測高補償Z軸示例,讓Z軸上的相機保持拍照平面和目標平面統一高度
'測高數據采用激光器提前通訊過來,激光器保持在相機前方獲取測高數據,提前反饋給Z軸進行微調
DIM HighData '測高偏差數據(通訊或者硬件接口獲取)需要標定好零點參數
BASE(3,4)
ATYPE=1,0'軸3為實際Z軸,軸4為虛擬軸
UNITS=100,100
DPOS=0,0
SPEED=20,20
ACCEL=200,200
DECEL=200,200
ADDAX(4) AXIS(3) '軸4疊加脈沖給軸3
WHILE 1
IF SCAN_EVENT(IN(1)) > 0 THEN 'IN1上升沿觸發
MOVEABS(HighData) AXIS(4) '通過偏差數據補償調整Z軸高度
ELSEIF SCAN_EVENT(IN(1)) < 0 THEN 'IN1下降沿觸發
MOVEABS(HighData) AXIS(4) '通過偏差數據補償調整Z軸高度
ENDIF
wend
● 效果如下:
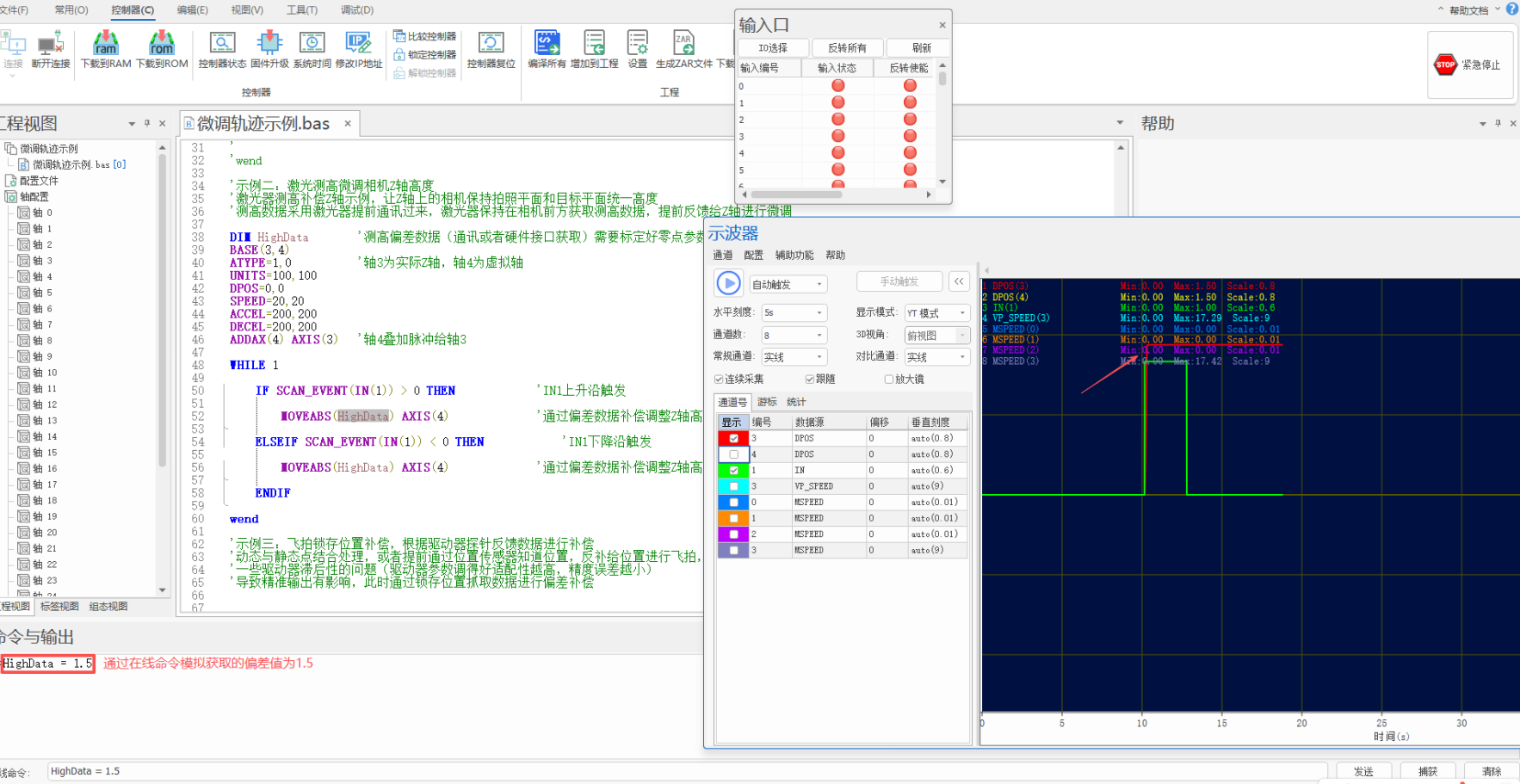
在線命令輸入HighData = 1.5,模擬獲取的偏差值為1.5,通過示波器可以觀察到,輸入口1信號觸發時,紅色曲線Z軸補償移動了1.5。
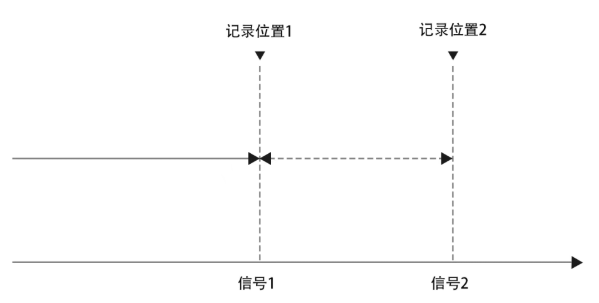
場景三 飛拍鎖存修正
應用描述:將傳感器輸出接入驅動器高速探針口,控制器通過總線讀取鎖存值,與理論目標坐標Target比較得到偏差P。由于驅動器響應滯后,P可能包含伺服周期累積誤差,需在下一插補周期立即補償。
通過REG_POS捕獲實際的飛拍位置,重新修正飛拍位置,當IN0上升或下降沿到達時,立即把偏差寫入table進行修正,觸發一次拍照即修正,根據修正后的位置進行飛拍,無需減速停頓,滿足高速飛拍節拍要求。
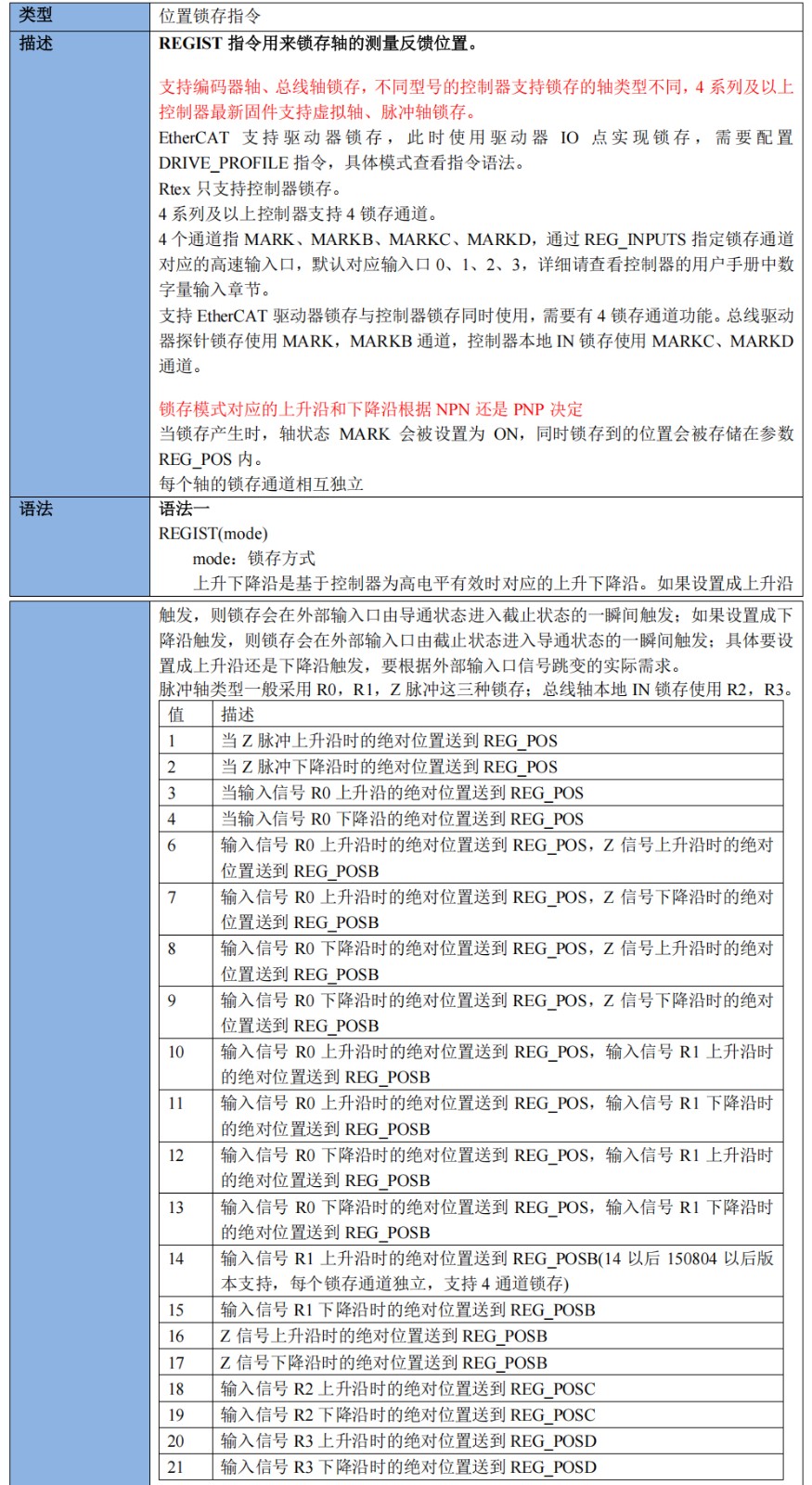
● 具體指令內容:
REGIST-鎖存
● Basic代碼如下:
'示例三:飛拍鎖存位置補償,根據驅動器探針反饋數據進行補償 '動態與靜態點結合處理,或者提前通過位置傳感器知道位置,反補給位置進行飛拍,通過鎖存獲取補償 '一些驅動器滯后性的問題(驅動器參數調得好適配性越高,精度誤差越小) '導致精準輸出有影響,此時通過鎖存位置抓取數據進行偏差補償 '做位置鎖存和計算偏差,并把鎖存值重新寫入飛拍點 '舉例簡單飛拍觸發 BASE(1) ATYPE=1 speed=10000 ACCEL=100000 DECEL=100000 DPOS=0 OP(0,0) TABLE(0)=100 HW_PSWITCH2(1,0,1,0,0,1) MOVEABS(TABLE(0)+50) DIM regist_imode regist_imode=4 BASE(1) '選擇需要鎖存位置的軸號 '當發現速度較快的場合,飛拍位置有偏差,拍照不準,啟動鎖存觸發,捕獲飛拍的實際位置 REGIST(regist_imode) '鎖存模式 IF regist_imode = 4 THEN WAIT UNTIL MARK ?"模式",regist_imode ,"鎖存位置 REG_POS",REG_POS OP(0,0) table(0)= table(0)+(table(0) -REG_POS) 'REG_POS的鎖存飛拍位置保存,與實際偏差做對比得出實際偏差 WAIT IDLE DPOS=0 ENDIF REGIST(regist_imode) '鎖存模式 '重新飛拍修正后的位置 HW_PSWITCH2(1,0,1,0,0,1) MOVEABS(table(0)+50) WAIT UNTIL MARK ?"模式",regist_imode ,"修正后的鎖存位置 REG_POS",REG_POS
● 效果如下:
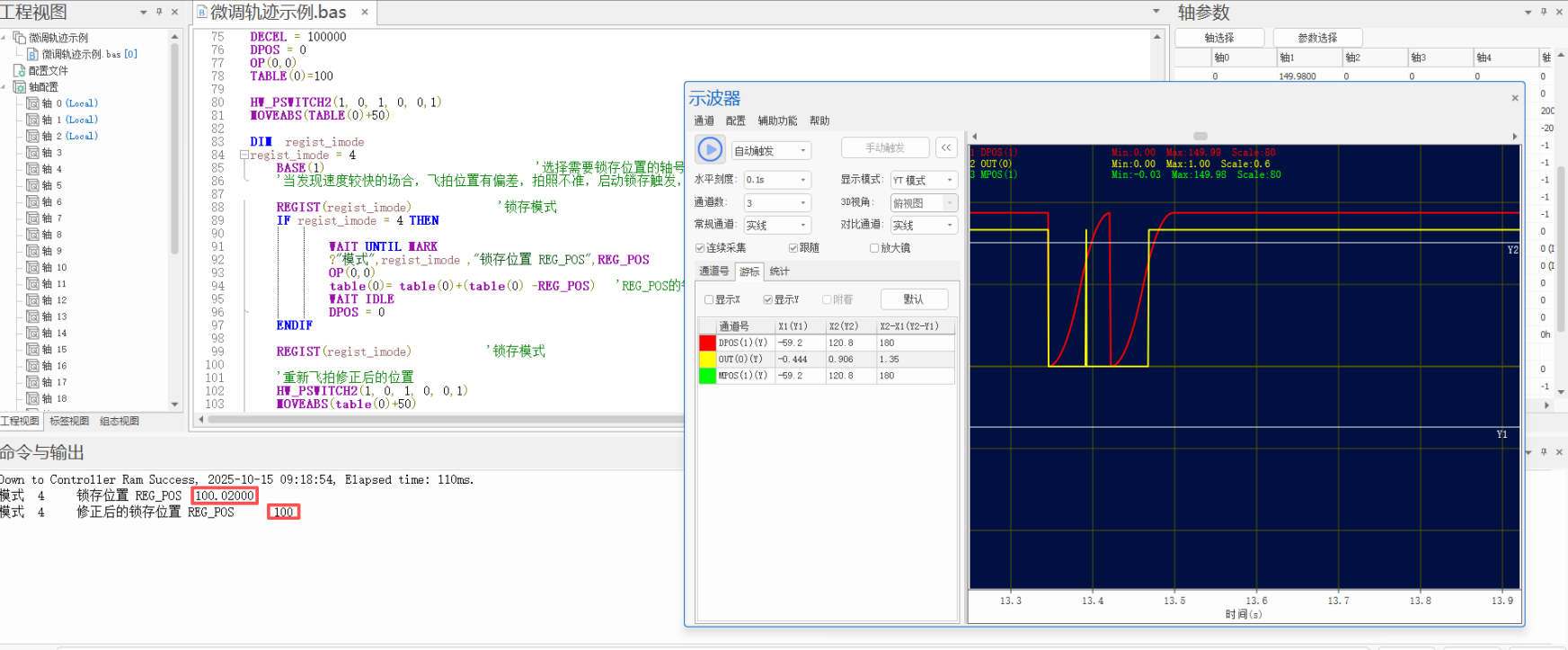
高速情況下,預設飛拍點位為100,但實際在100.02輸出了,后續根據偏差值修正后,重新執行第二次飛拍,實際鎖存到位置為100,和一開始預設點位一致,鎖存飛拍補正完成。
場景四 螺距補償和反向間隙補償
應用描述:在實際應用中,導軌的螺距分布不均勻,可能導致運動位置不準確;而在螺距較大時,換向時軸旋轉可能無法立即帶動機臺移動。針對這些問題,我們可以通過螺距補償和反向間隙補償功能來解決,從而提高運動精度和響應速度。
● 具體指令內容:
螺距補償:每點的補償脈沖個數存儲在TABLE表里面。
PITCHEST-螺距補償
● Basic代碼如下:
'單軸螺距補償: '例一: ATYPE(1)=6 UNITS(1)=100 DPOS(1)=0 BASE(0) ATYPE=1 UNITS=100 SPEED=100 ACCEL=500 DECEL=500 TABLE(0,0*UNITS(0),-30*UNITS(0),-50*UNITS(0),30*UNITS(0),50*UNITS(0),0*UNITS(0))'TBALE存貯螺距補償值,補償值是脈沖個數,不是補償距離值 DPOS=0 MPOS=0 PITCHSET(1,0,100,6,0)'MPOS=0時,開始補償6個點,間隔100 TRIGGER MOVE(700) MOVE(-700) WAITIDLE PITCHSET(0,100,100,6,0)
● 效果如下:
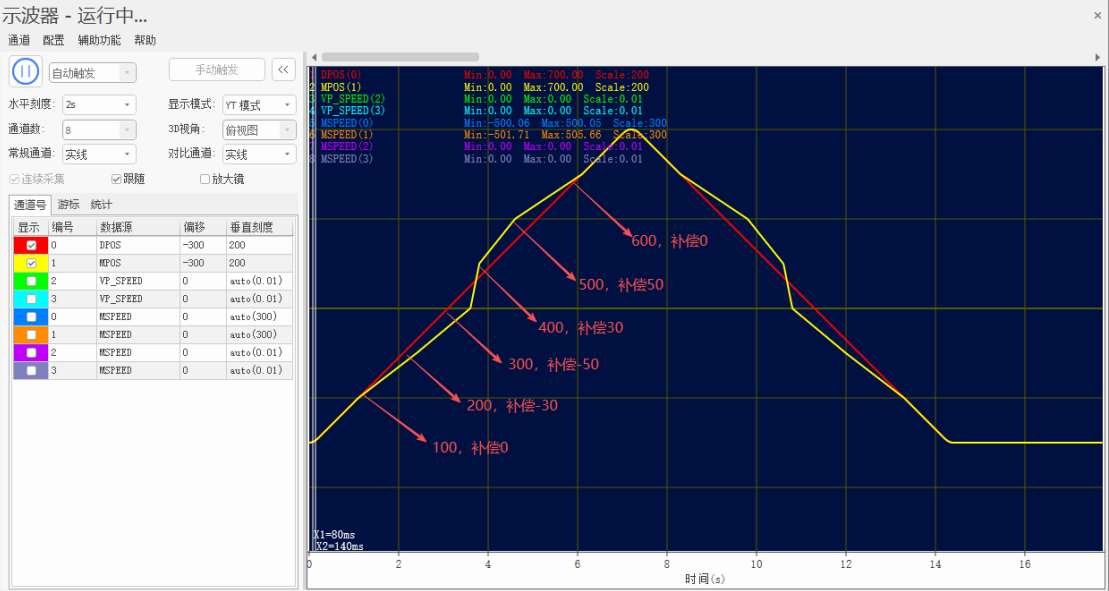
從示波器抓取的數據可以看到,在這段運動中,編碼器軸1實際的位置有六段補償。
教學視頻可點擊→強實時運動控制內核MotionRT750(十):運動控制中的微調軌跡動態補償查看。
本次,正運動技術強實時運動控制內核MotionRT750(十):運動控制中的微調軌跡動態補償,就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師:400-089-8936。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
正運動技術專注于運動控制技術研究和通用運動控制軟硬件產品的研發,是國家級高新技術企業。正運動技術匯集了來自華為、中興等公司的優秀人才,在堅持自主創新的同時,積極聯合各大高校協同運動控制基礎技術的研究,是國內工控領域發展最快的企業之一,也是國內少有、完整掌握運動控制核心技術和實時工控軟件平臺技術的企業。主要業務有:運動控制卡_運動控制器_EtherCAT運動控制卡_EtherCAT控制器_運動控制系統_視覺控制器__運動控制PLC_運動控制_機器人控制器_視覺定位_XPCIe/XPCI系列運動控制卡等等。
審核編輯 黃宇
-
運動控制
+關注
關注
5文章
829瀏覽量
34649 -
動態補償
+關注
關注
0文章
8瀏覽量
7211 -
正運動技術
+關注
關注
0文章
134瀏覽量
905
發布評論請先 登錄
Windows實時運動控制軟核(七):LOCAL高速接口測試之Labview










Windows實時運動控制軟核(六):LOCAL高速接口測試之Matlab

強實時運動控制內核MotionRT750(六):us級高速交互之C++,為智能裝備提速



 工商網監
工商網監
評論