") 晶振在無(wú)人機(jī)中的關(guān)鍵應(yīng)用
晶振在無(wú)人機(jī)中的關(guān)鍵應(yīng)用

清晨,無(wú)人機(jī)迎著朝陽(yáng)自主啟航,按照預(yù)設(shè)航線精準(zhǔn)巡弋于萬(wàn)畝良田之上;正午時(shí)分,它于百米高空穩(wěn)穩(wěn)懸停,將建筑工地的實(shí)時(shí)高清數(shù)據(jù),無(wú)縫傳回云端指揮系統(tǒng);夜幕低垂,它穿梭于城市樓宇之間,燈光劃出流暢而準(zhǔn)確的軌跡,猶如夜空中的智能信使……
這些看似高度自主的“智能飛行”,背后都倚賴一顆微小卻至關(guān)重要的心臟—高精度晶振(Crystal Oscillator)。它不僅為飛行控制系統(tǒng)提供基準(zhǔn)時(shí)序,更是導(dǎo)航定位、無(wú)線通信與多傳感器數(shù)據(jù)同步的“節(jié)奏之源”,遍布其核心電子系統(tǒng),確保每一次起飛、轉(zhuǎn)向、懸停與降落,都精準(zhǔn)如鐘、穩(wěn)定可靠。
晶振在無(wú)人機(jī)中的關(guān)鍵應(yīng)用
飛行控制主系統(tǒng)
飛行控制主系統(tǒng)是無(wú)人機(jī)的大腦,無(wú)人機(jī)的飛行、懸停、避障以及姿態(tài)的變化等都需要采用大量的傳感器,通過(guò)傳感器進(jìn)行數(shù)據(jù)的采集和回傳,CPU對(duì)數(shù)據(jù)進(jìn)行分析處理后發(fā)出控制指令,隨后由分布在各部位的電機(jī)伺服系統(tǒng)執(zhí)行相應(yīng)動(dòng)作。飛控主處理器(MCU/MPU)需要極高的時(shí)鐘精度來(lái)執(zhí)行復(fù)雜的控制算法(如PID循環(huán))。晶振為飛控MCU提供主時(shí)鐘,確保所有指令的計(jì)算和發(fā)送時(shí)序精確。微小的時(shí)鐘偏差都可能導(dǎo)致控制指令延遲,從而引起飛行抖動(dòng)、漂移甚至失控。通常使用一個(gè)高精度、高穩(wěn)定度的溫補(bǔ)晶振(TCXO),以抵抗因環(huán)境溫度變化引起的頻率漂移,確保在各種氣候條件下飛控核心時(shí)鐘的穩(wěn)定性。
全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)
定位模組(如GPS、北斗)是無(wú)人機(jī)的“地圖和指南針”,提供精確的絕對(duì)位置、速度和授時(shí)信息。為了使GNSS接收芯片能夠準(zhǔn)確鎖定并解調(diào)來(lái)自數(shù)萬(wàn)公里外衛(wèi)星的射頻信號(hào),這里需要極高精度和穩(wěn)定性的溫補(bǔ)晶振TCXO,TCXO能通過(guò)內(nèi)部電路補(bǔ)償因溫度變化引起的頻率漂移,確保在無(wú)人機(jī)從低溫地面到高溫高空的整個(gè)工作溫度范圍內(nèi),頻率依然穩(wěn)定,高端無(wú)人機(jī)GNSS模塊常要求TCXO的頻率精度在±0.5ppm至±2.5ppm以內(nèi)。
同時(shí),模組內(nèi)部通常還有一個(gè)32.768kHz的實(shí)時(shí)時(shí)鐘 (RTC),用于保持實(shí)時(shí)時(shí)鐘運(yùn)行,記錄精確時(shí)間。這在無(wú)人機(jī)斷電后由備用電池供電,用于實(shí)現(xiàn)快速熱啟動(dòng)(記住衛(wèi)星星歷,縮短下次定位時(shí)間)。
數(shù)字圖像傳輸系統(tǒng)
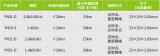
無(wú)人機(jī)圖像傳輸系統(tǒng)將無(wú)人機(jī)相機(jī)拍攝的高清視頻實(shí)時(shí)傳輸?shù)降孛孢b控器,通常采用2.4GHz和5.8GHz頻段,部分場(chǎng)景還依賴4G/5G蜂窩網(wǎng)絡(luò),高穩(wěn)定性的晶振是保障圖傳穩(wěn)定工作的關(guān)鍵。隨著4K/8K超高清視頻的應(yīng)用,攝像頭模組也需采用低抖動(dòng)、低相位噪聲的晶振,以提升圖像準(zhǔn)確性、清晰度和細(xì)節(jié)表現(xiàn),減少失真與噪聲。
此外,晶振還為通信系統(tǒng)提供穩(wěn)定的本振頻率,確保無(wú)人機(jī)與地面控制端之間數(shù)據(jù)傳輸?shù)目煽啃裕瑢?shí)現(xiàn)指令準(zhǔn)確傳達(dá)和圖像流暢回傳。通過(guò)提供統(tǒng)一的時(shí)鐘信號(hào),晶振建立起嚴(yán)格的同步機(jī)制,使發(fā)射與接收端能夠在精確時(shí)序下處理數(shù)據(jù),顯著降低傳輸錯(cuò)誤與丟包率,保障飛行過(guò)程中數(shù)據(jù)的完整性與實(shí)時(shí)性。
視覺(jué)感知與避障系統(tǒng)
現(xiàn)代無(wú)人機(jī)的視覺(jué)感知與避障系統(tǒng)通常依賴攝像頭、超聲波及紅外傳感器實(shí)現(xiàn)環(huán)境感知與自主導(dǎo)航,而晶振通過(guò)為視覺(jué)處理單元(VPU)和圖像傳感器提供精準(zhǔn)的像素時(shí)鐘(MCLK)及數(shù)據(jù)傳輸時(shí)鐘,確保圖像采集、處理和傳輸?shù)母叨韧脚c時(shí)序準(zhǔn)確。多個(gè)時(shí)鐘信號(hào)間的嚴(yán)格同步是保障視覺(jué)數(shù)據(jù)完整性和處理可靠性的基礎(chǔ),直接影響到障礙物識(shí)別與導(dǎo)航?jīng)Q策的實(shí)時(shí)性和準(zhǔn)確性。根據(jù)所采用的接口協(xié)議(如MIPI CSI),該系統(tǒng)往往需選用特定頻率、低抖動(dòng)和低相位噪聲的晶振,以滿足高速圖像信號(hào)傳輸?shù)膰?yán)苛要求,從而提升整個(gè)視覺(jué)系統(tǒng)的穩(wěn)定性和響應(yīng)性能。
-
mcu
+關(guān)注
關(guān)注
147文章
18925瀏覽量
398226 -
晶振
+關(guān)注
關(guān)注
35文章
3564瀏覽量
73448 -
無(wú)人機(jī)
+關(guān)注
關(guān)注
236文章
11300瀏覽量
195683
原文標(biāo)題:高穩(wěn)頻率,精準(zhǔn)導(dǎo)航,讓每一次起飛都精準(zhǔn)無(wú)誤
文章出處:【微信號(hào):huktd0722,微信公眾號(hào):泰晶科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
無(wú)人機(jī)巡檢系統(tǒng)在現(xiàn)代產(chǎn)業(yè)中的應(yīng)用價(jià)值
無(wú)人機(jī)巡檢系統(tǒng)在風(fēng)電運(yùn)維中的關(guān)鍵技術(shù)解析
陀螺儀在無(wú)人機(jī)中的應(yīng)用:無(wú)人機(jī)精準(zhǔn)飛行的關(guān)鍵保障

離軸技術(shù):賦能無(wú)人機(jī)精準(zhǔn)配送的核心芯片應(yīng)用
低空物流:無(wú)人機(jī)開(kāi)啟未來(lái)配送新篇章
酷芯微電子核心技術(shù)在無(wú)人機(jī)中的應(yīng)用
愛(ài)普生M-G370PDS慣性測(cè)量單元在無(wú)人機(jī)導(dǎo)航中的應(yīng)用

石英晶振在無(wú)人機(jī)領(lǐng)域的應(yīng)用

晶科鑫晶振守護(hù)無(wú)人機(jī)全場(chǎng)景運(yùn)行
淺談反無(wú)人機(jī)技術(shù)的核心原理
溫濕度試驗(yàn)箱在大載重無(wú)人機(jī)產(chǎn)品測(cè)試中的應(yīng)用

晶振化身空中交警,為無(wú)人機(jī)飛行保駕護(hù)航

愛(ài)普生TG2520SMN溫補(bǔ)晶振在無(wú)人機(jī)導(dǎo)航與通信的應(yīng)用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論