 無人駕駛技術Apollo 1.0用于農業機械的的低成本適配過程
無人駕駛技術Apollo 1.0用于農業機械的的低成本適配過程

2017年7月Apollo 1.0在Github上正式發布。當在新聞上讀到這條消息——“Apollo 1.0開放封閉場地的自動駕駛能力”時,我就在想,我們的農場就是封閉場地,是否可以把Apollo 1.0用做公司機器人系統的無人駕駛模塊呢?
第二天,一到公司我就把源碼下載下來,開始配置運行環境。當用Rosbag在Dreamview里跑起系統自帶的Demo時,我還是很興奮的,立刻被Apollo圈粉了。Apollo是一個比較完整的開放平臺,而且對林肯車和推薦硬件做了適配,偏重實戰。如果按照推薦方案配置,3天之內實現自動駕駛并不夸張。然而基于安全性、可靠性等因素,平臺推薦的硬件配置高、價格昂貴,這對農業場景并不適用。
我認為無人駕駛技術最終的目的是服務大眾,讓人們的生活更便捷、更美好。實際上,這項技術可以應用在很多行業,尤其是農業場景,比較容易落地。如果能夠簡化,實現低成本的方案,將大大加快無人駕駛在農業領域的發展。所以,簡化這項技術,使其更貼近大眾是非常值得一試的。因此,我們嘗試了低成本的硬件方案,下面將和大家分享一下適配過程。
1
車平臺
首先,要有一部實驗車。我們改裝了一部越野電動車,由一個專營電動車的車行定制而成。該車底盤為200x100cm,四輪都有減震,是一個越野底盤,后橋裝有一臺差速電機,能跑40km/h。
此外,我們加裝了EPS轉向助力系統和角度傳感器,同時更換了電機控制器,用來實現線控和RC遙控。然后,我們模擬農場環境做了測試,經過幾次迭代,在進一步改裝之后,增強了車身的可靠性和穩定性,使其可以比較順暢的在顛簸路面上行駛。
(ThorTec農場無人駕駛實驗車)
2
硬件平臺
Apollo 1.0推薦的硬件主要有:IPC、GNSS接收機、IMU和PCI-CAN卡。在1.0中定位是關鍵模塊,只有實現厘米級的定位,才能實現無人駕駛。
IMU的優點是頻率高,在高速的情況下表現好,缺點是存在累計誤差,需要GNSS提供的絕對位置來糾偏。而GNSS設備頻率低,恰好是在低速時表現好,并且在定位絕對位置時,采用RTK差分可以實現厘米級定位。
我們的測試場景是封閉園區低速行駛,速度不超過10km/h。于是,我們對定位設備做了裁剪,去掉了IMU,采用Novatel 617D 板卡RTK差分定位,同時采用雙天線取得航向,最終實現位置精度2cm,航向精度1°的厘米級定位。PCI-CAN卡使用esdcan-pcie402,IPC選用普通的工控機。GPS設備的裁剪一項,使成本降低了10幾萬元,實現了我們的目標。
3
軟件平臺
我們主要對以下5個模塊做了修改:
1.GPS驅動模塊:主要解析Novatel 617D 的三個協議,BestPos,BestVel和Heading。BestPos解析出WGS84大地坐標;BestVel解析水平和垂直速度;Heading解析航向角。具體內容可以參閱Nvatel的技術說明書。
2.Localization:定位模塊的修改,目的是將原來通過IMU獲取的航向、線性速度等數據替換為GNSS接收機解析的數據。
3.Canbus:添加角度傳感器,并適配車輛的控制器CanOpen協議。
4.Control:Apollo 1.0使用通用的LQR和PID控制算法,分別實現車輛動力學的橫向和縱向控制。這里我們主要修改了控制模塊的配置文件,針對我們的車輛調整各項參數,為控制模塊輸入合適的參數,保證控制模塊輸出正確的指令。
5.Common模塊:使用GNSS接收機獲取的數據,修改預瞄算法。
最后,我們模擬農場環境,成功的進行了測試驗證。事實證明,我們的低成本方案是可行的,完全實現了Apollo1.0封閉場地無人駕駛。
我們在適配過程中遇到的很多問題,都在Apollo開發者社區中得到了開發者和Apollo工程師的解答,這對我們的幫助很大。這里,我把我們的適配過程給大家做了簡單的分享,希望同樣對大家有所助益。
-
無人駕駛
+關注
關注
100文章
4297瀏覽量
126853 -
Apollo
+關注
關注
5文章
350瀏覽量
19723
原文標題:開發者說 | Apollo 1.0適用于農業場景的低成本適配過程分享
文章出處:【微信號:Apollo_Developers,微信公眾號:Apollo開發者社區】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
農業機械智慧運維管理IOT平臺解決方案

佑駕創新助力低速無人駕駛行業高質量發展
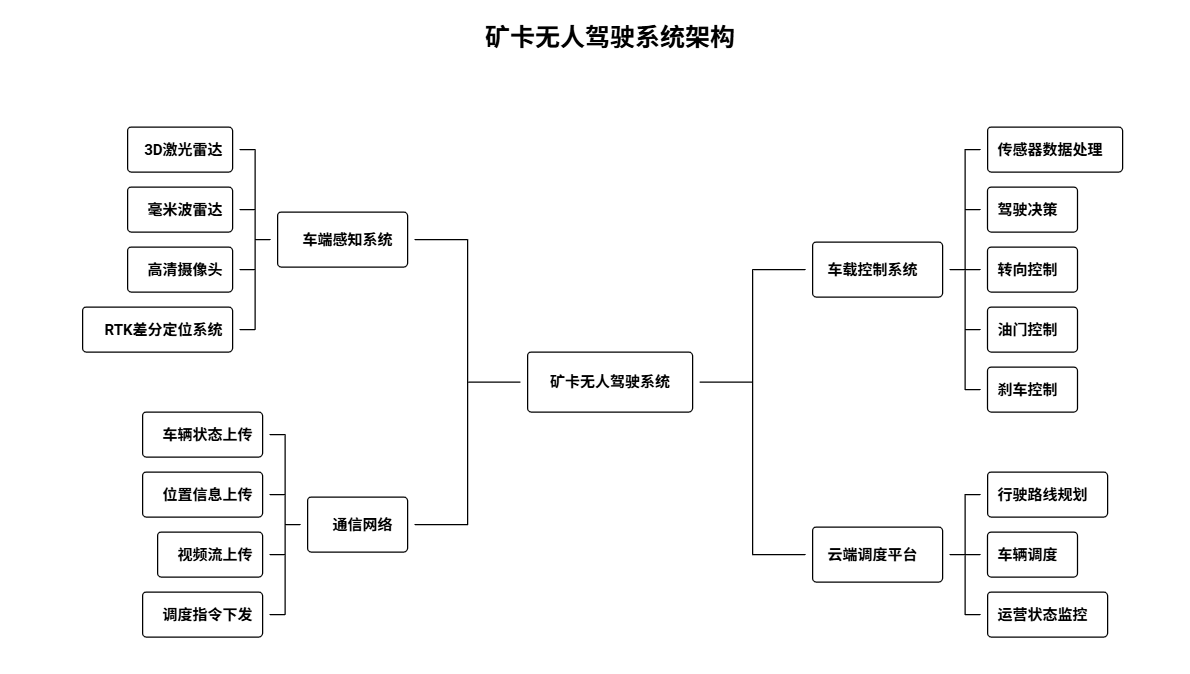
礦卡無人駕駛從理論到落地的全過程記錄(轉載)
小馬智行無人駕駛車參與第十五屆全運會火炬傳遞
中海達亮相2025中國國際農業機械展覽會
華工科技亮相2025中國國際農業機械展覽會
華信天線亮相2025波蘭國際農業機械展
2025無人駕駛技術細節及發展趨勢|(星創易聯細節解析)
無人駕駛:智能決策與精準執行的融合
合眾思壯旗下eSurvey亮相2025印尼國際農業機械展
智行者科技無人駕駛小巴落地海南

合眾思壯亮相2025新疆國際農業機械博覽會
無人駕駛技術未來在哪里?低速才是突破口




 工商網監
工商網監
評論