 如何利用FreeRTOS的多任務機制優化程序呢?
如何利用FreeRTOS的多任務機制優化程序呢?

1
創建任務
創建任務時使用的函數如下:
BaseType_t xTaskCreate( TaskFunction_t pxTaskCode, //函數指針,任務函數
const char * const pcName, //任務的名字
const configSTACK_DEPTH_TYPE usStackDepth,//棧大小,單位為word,10表示40字節
void * const pvParameters, //調用任務函數時傳入的參數
UBaseType_t uxPriority, //優先級
TaskHandle_t * const pxCreatedTask );//任務句柄,以后使用它來操作這個任務
參數說明:
- pvTaskCode:函數指針,可以簡單地認為任務就是一個C函數。它稍微特殊一點:永遠不退出,或者退出時要調用"vTaskDelete(NULL)"
- pcName:任務的名字,FreeRTOS內部不使用它,僅僅起調試作用。長度為:confifigMAX_TASK_NAME_LEN
- usStackDepth:每個任務都有自己的棧,這里指定棧大小。單位是 word ,比如傳入 100 ,表示棧大小為 100 word ,也就是 400 字節。最大值為 uint16_t 的最大值。怎么確定棧的大小,并不容易,很多時候是估計。精確的辦法是看反匯編碼。
- pvParameters:傳入參數,調用 pvTaskCode 函數指針時用到:pvTaskCode(pvParameters)
- uxPriorit:優先級范圍:0~(confifigMAX_PRIORITIES – 1) 數值越小優先級越低, 如果傳入過大的值,xTaskCreate會把它調整為(confifigMAX_PRIORITIES – 1)
- pxCreatedTask:用來保存 xTaskCreate 的輸出結果:task handle 。以后如果想操作這個任務,比如修改它的優先級,就需要這個 handle 。如果不想使用該 handle ,可以傳入 NULL 。
- 返回值:成功:pdPASS ;失敗:errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY( 失敗原因只有內存不足 )
- 注意:文檔里都說失敗時返回值是 pdFAIL ,這不對。pdFAIL 是 0 , errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY 是 -1 。
實例:
void Task1Function(void * param)
{
while (1)
{
printf("1");
}
}
void Task2Function(void * param)
{
while (1)
{
printf("2");
}
}
xTaskCreate(Task1Function, "Task1", 100, NULL, 1, &xHandleTask1);
xTaskCreate(Task2Function, "Task2", 100, NULL, 1, NULL);
開啟任務調度:
vTaskStartScheduler(); //開啟任務調度
結果:

2
刪除任務
刪除任務使用的函數如下:
void vTaskDelete( TaskHandle_t xTaskToDelete );
參數說明:
- xTaskToDelete:任務句柄,使用 xTaskCreate 創建任務時可以得到一個句柄,也可傳入NULL ,這表示刪除自己。
- 句柄的實質就是這個任務結構體的指針,在FreeRTOS中任務的創建利用面向對象的思想,創建的一個個任務都是結構體,刪除任務的實質就類似于C語言中的free釋放內存
實例:
void vTask1( void *pvParameters )
{
const TickType_t xDelay100ms = pdMS_TO_TICKS( 100UL );
BaseType_t ret;
/* 任務函數的主體一般都是無限循環 */
for( ;; )
{
/* 打印任務的信息 */
printf("Task1 is runningrn");
ret = xTaskCreate( vTask2, "Task 2", 1000, NULL, 2, &xTask2Handle );
if (ret != pdPASS) printf("Create Task2 Failedrn");
// 如果不休眠的話, Idle任務無法得到執行
// Idel任務會清理任務2使用的內存
// 如果不休眠則Idle任務無法執行, 最后內存耗盡
vTaskDelay( xDelay100ms );
}
3
任務狀態
- 當前正在進行的任務,是running狀態;其他所有任務都處于not running狀態
- "not running"狀態還可以細分為:
ready :就緒,隨時可以運行 blocked :阻塞,該任務在等待某一事件發生 suspended :掛起,該任務暫停休息
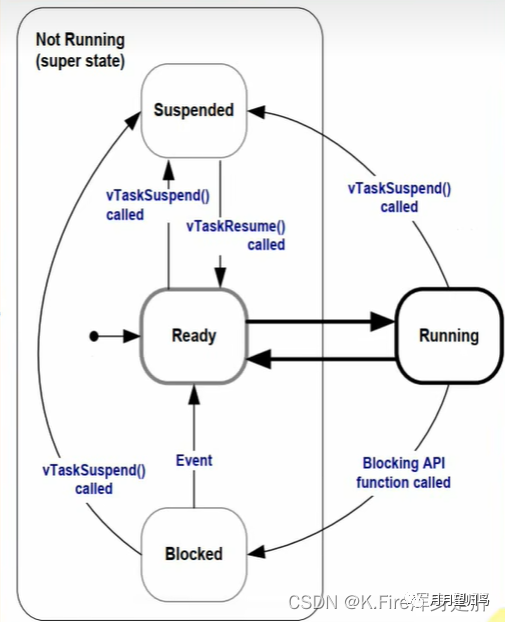
當創建任務并開始任務調度后,所有任務都處于Ready就緒狀態,系統隨機挑選一個任務Running,正在執行的任務可以使用vTaskSuspend函數使自己進入掛起狀態(傳入參數NULL或自己的句柄),也可以使其他任務進入掛起狀態(傳入參數為需要掛起任務的句柄),進入暫停狀態后,需要在別的任務執行過程中調用vTaskResume函數該任務才會重新進入Ready狀態;
在任務執行過程中,需要等待某個函數或事件的發生,則進入掛起狀態(Baocked),當等待的事件(可能是中斷或某個任務)發生后該任務才會恢復Ready狀態。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
C語言
+關注
關注
183文章
7644瀏覽量
145600 -
FreeRTOS
+關注
關注
14文章
499瀏覽量
66941 -
狀態機
+關注
關注
2文章
499瀏覽量
29149
發布評論請先 登錄
相關推薦
熱點推薦
基于 stm32 的 FreeRTOS 的詳細移植步驟及其多任務應用 精選資料分享
目錄本文簡介:學習 FreeRTOS 原理,在 STM32 下完成一個基于 FreeRTOS 的多任務程序,執行 3 個周期性 task ,具體任務
發表于 08-03 07:21
在STM32下完成FreeRTOS的多任務程序開發
基于在STM32下完成FreeRTOS的多任務程序開發 序言 二.項目說明三.實戰過程 1)實驗器材 2)開始實戰 3)任務實現 4)效果展示四. 結語 序言(一)
發表于 08-09 07:27
如何去實現基于stm32的FreeRTOS多任務程序
基于 stm32 的 FreeRTOS多任務程序實現一、什么是FreeRTOS二、AHT20數據采集原理電路繪制三、FreeRTOS的
發表于 08-24 07:45
FreeRTOS多任務系統的相關資料推薦
目錄單片機各編程系統特點1、裸機系統(1)輪詢系統(2)前后臺系統2、多任務系統單片機各編程系統特點單片機編程中有裸機系統與多任務系統。裸機系統又分為輪詢系統和前后臺系統,FreeRTOS就是一種
發表于 01-13 07:51
如何在STM32下完成一個基于FreeRTOS的多任務程序
任務要求:在STM32下完成一個基于FreeRTOS的多任務程序,執行3個周期性task;目錄一.介紹FreeRTOS二.
發表于 01-17 07:10
如何在STM32下完成一個基于FreeRTOS的多任務程序
文章目錄前言一、添加溫濕度采集模塊二、基于FreeRTOS的多任務程序總結前言此次,本菜鳥有兩個任務1.在菜鳥入門5的stm32最小系統中添加 AHT20數據采集原理電路(溫濕度傳感器
發表于 02-10 08:02
什么是多任務系統?FreeRTOS任務與協程簡析
FreeRTOS學習之FreeRTOS任務基礎知識轉行小白一枚,通過博客記錄自我學習,望更多博友多多指點,感激不盡!RTOS系統的核心就是任務管理,學習RTOS系統主要是為了使用RTO
發表于 02-18 06:38
keil下的FreeRtos多任務程序學習
keil下的FreeRtos多任務程序學習目標手動移植FreeRtos(以STM32F103為例)直接使用野火的模板學習目標學習FreeRTOS
發表于 02-21 06:14
基于消息驅動的多任務操作機制
本文對多任務操作機制與傳統的單任務操作機制進行了比較,分析了多任務系統中數據交換的方法,特別是目前最為流行的用消息驅動方式實現的系統。結合程
發表于 05-14 16:56
?0次下載
51單片機多任務機制的實現策略研究
從操作系統實現多任務機制的原理入手,分析了51單片機實現多任務機制的基本條件,論述了5l單片機實現多任務控制的二種方案。
發表于 09-19 17:26
?159次下載

stm32基于FreeRTOS的多任務程序
目錄實驗環境實驗目的實驗步驟代碼:實驗環境1.野火STM32MINI開發板2.keil5實驗目的在STM32下完成一個基于FreeRTOS的多任務程序,執行3個周期性task,具體任務
發表于 12-07 10:36
?14次下載




 工商網監
工商網監
評論