 BUCK開關電源的環路分析(二)
BUCK開關電源的環路分析(二)

上一篇文章中我們介紹了CCM電壓模式下BUCK電源的環路的“手動”補償,也就是通過觀察功率級伯德圖后,根據其特征手動放置零極點補償系統增益和相位。這種方法需要多次嘗試才能達到想要的效果,較為費時費力。
這一篇我們介紹一種所謂的“k”因子方法來實現一次環路補償到位。我們再將功率級開環的伯德圖拿出來看一看。
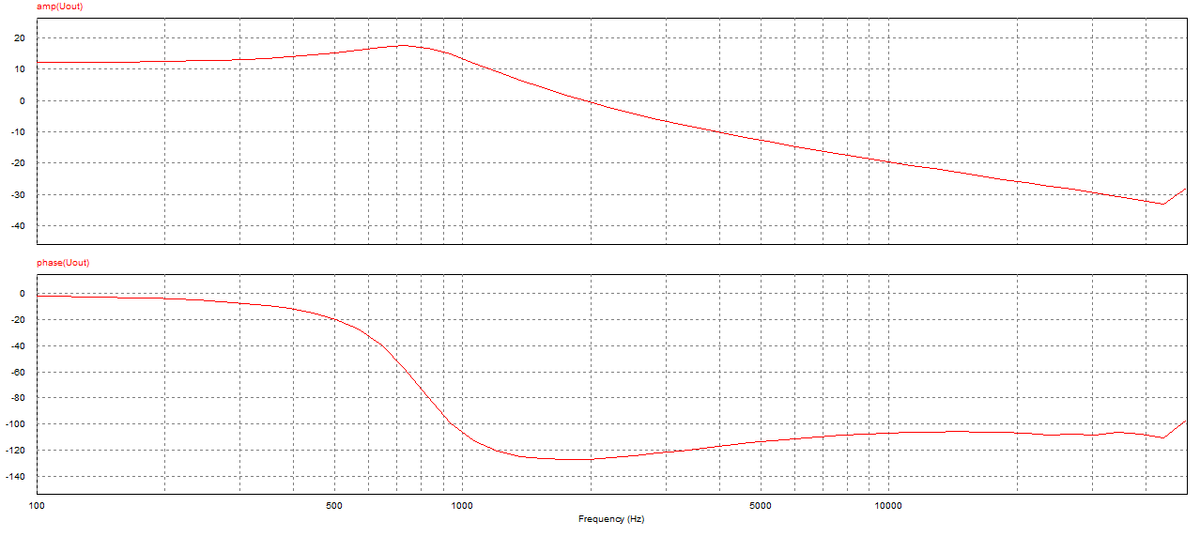
與上篇一樣,我們將系統穿越頻率fc設置在5kHz。根據上圖可知,在功率級的交流響應在5kHz處,相位滯后113°,增益衰減12.7dB。
對比手動放置零極點,我們在這“k”因子方法中需要先提出補償后的系統相位裕量才能進行后面計算,這里我們按照工程一般習慣設置相位裕量為45°。
所以,我們需要在補償電路中提升的相位為P:
P = 45°-(-113°)- 90°=68°
而需要補償的增益為G:
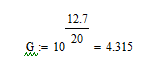
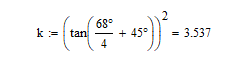
“k”因子的k值可以通過以下公式計算:
K = [ tan(P/4 + 45°)]
則
同樣,這里采用的環路補償類型仍然是放大器類型三:
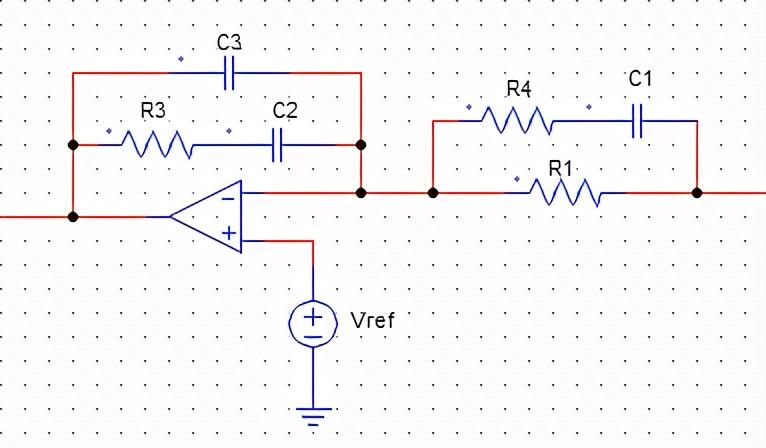
R1通常在分壓輸出網絡中已確定,這里我們選擇R1=14kΩ,其余的參數,我們可以通過以下公式得出。
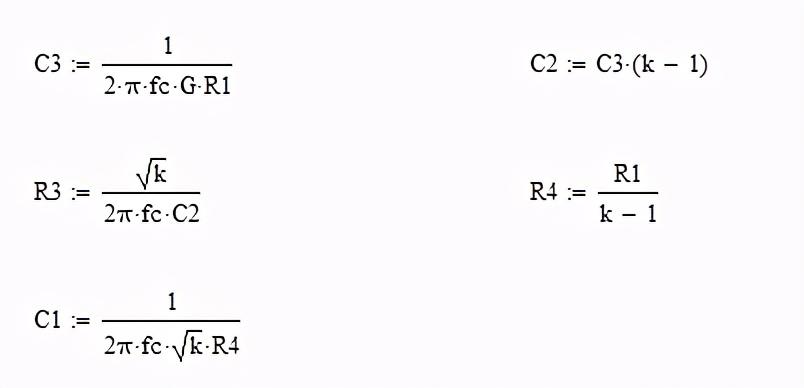
據此,可以得到環路網絡參數:
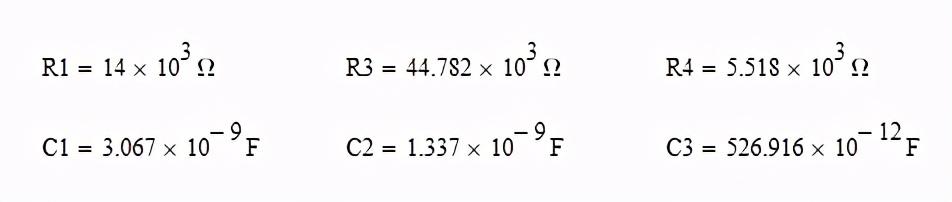
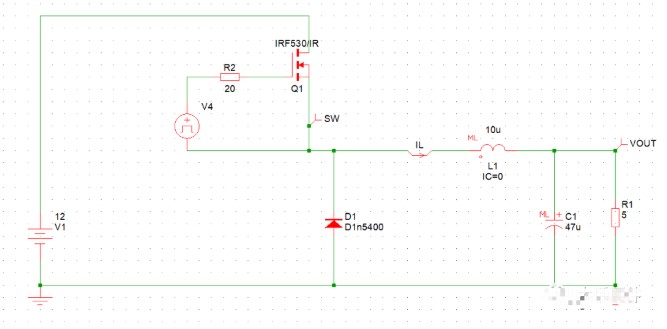
將此補償加入功率級:
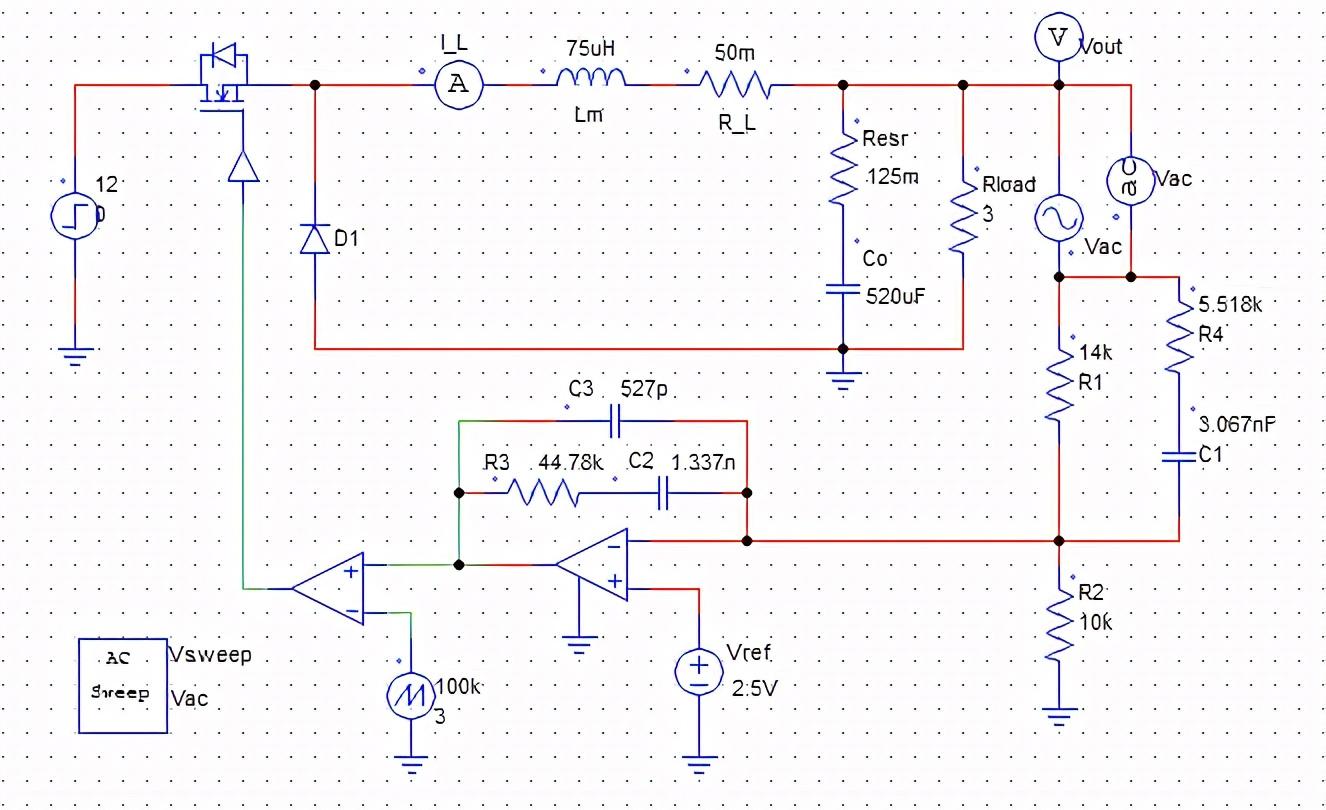
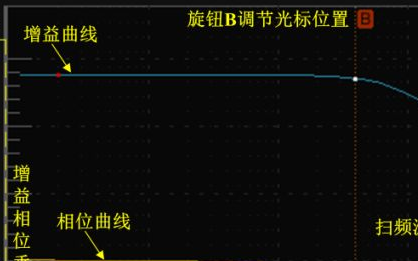
仿真結果如下:
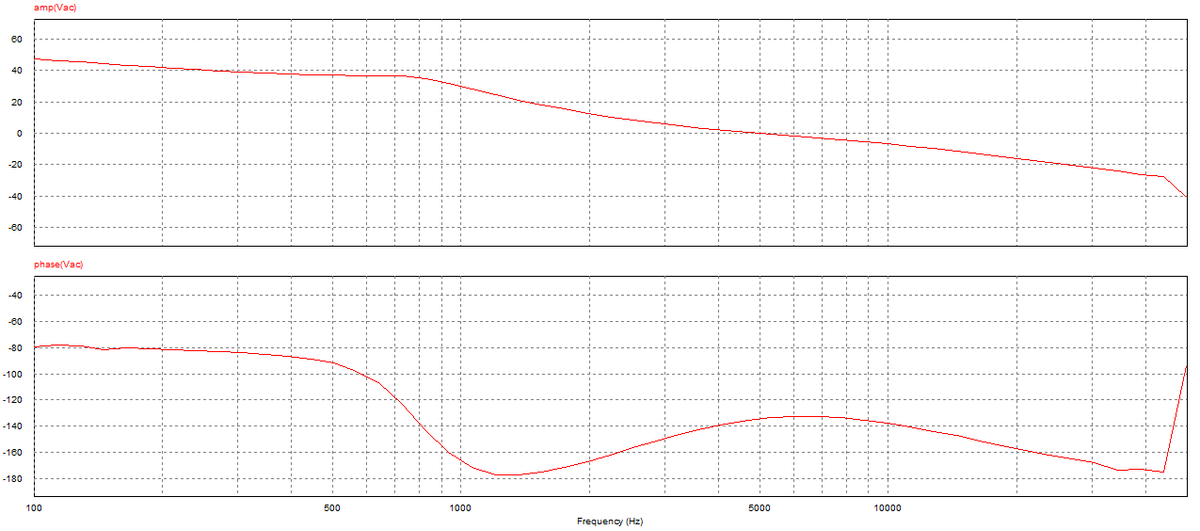
從該伯德圖中可以看到,穿越頻率為5kHz,相位裕量為45°。與設計一致。
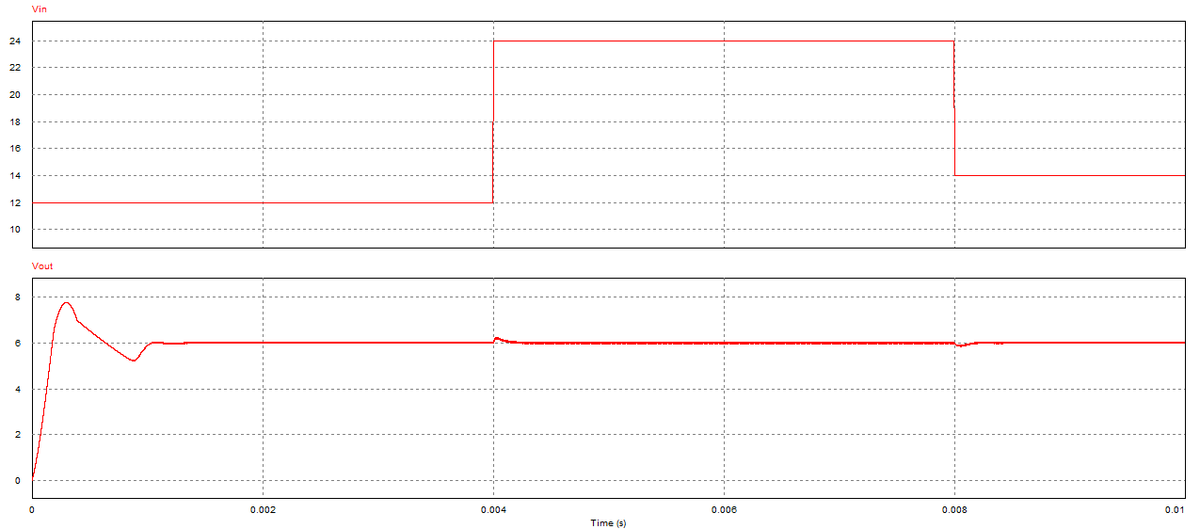
輸入電壓調整能力:輸入電壓改變:12V→24V→14V,輸出響應如下:
輸出負載調整能力: 0.2A→2A→1A,輸出響應如下:
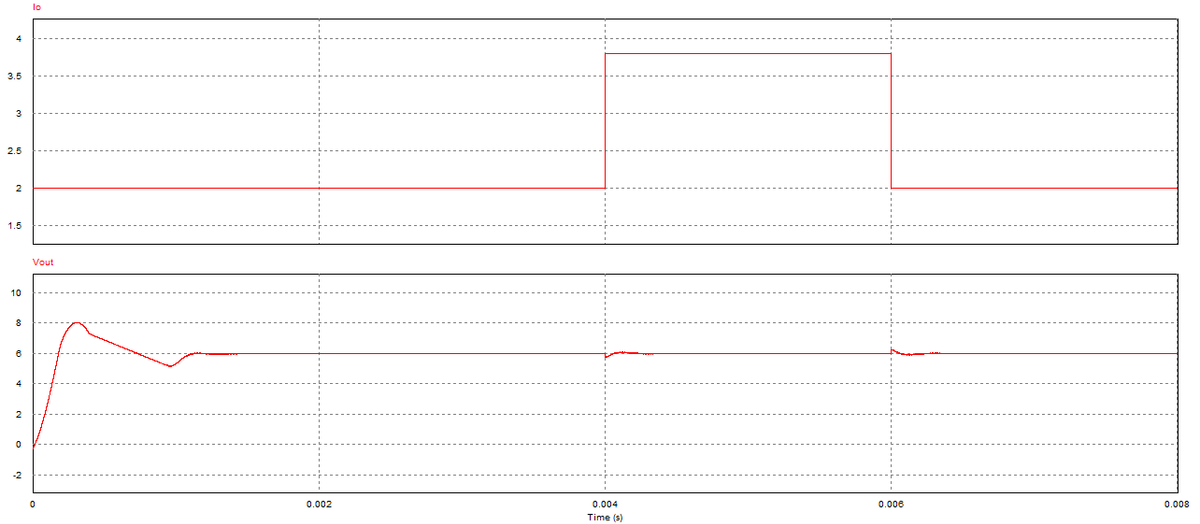
可見,輸入電壓調整能力和輸出負載調整能力比手動放置零極點的補償的效果好。但輸出啟動有較大過沖。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
開關電源
+關注
關注
6570文章
8869瀏覽量
498933 -
BUCK
+關注
關注
32文章
490瀏覽量
68307 -
補償電路
+關注
關注
2文章
81瀏覽量
28539 -
CCM
+關注
關注
0文章
174瀏覽量
25731 -
環路
+關注
關注
0文章
51瀏覽量
12460
發布評論請先 登錄
相關推薦
熱點推薦
開關電源環路穩定性分析(三)
大家好,這里是大話硬件。在前面的章節中,分析了開關電源為什么需要閉環環路控制,并且得出了開關電源需要穩定可靠,就必須增加環路控制的結論。
發表于 11-21 16:15
?5089次閱讀
開關電源環路穩定性分析(二)
,可以很快判斷是純粹放大電路還是微分,積分電路。在開關電源里面,環路比運放的環路要復雜很多,為了分析簡單,只討論Buck變換器,基于PWM調
發表于 11-22 08:00
開關電源的小信號模型和環路原理及設計
開關電源的小信號模型和環路原理及設計
摘要:建立了Buck電路在連續電流模式下的小信號數學模型,并根據穩定性原則分析了電壓模式和電流模式控制下的環
發表于 03-04 16:55
?2075次閱讀
開關電源的小信號模型和環路設計
開關電源的小信號模型和環路設計
建立了Buck電路在連續電流模式下的小信號數學模型,并根據穩定性原則分析了電壓模式和電流模式控制下的
發表于 03-16 11:19
?3826次閱讀




 工商網監
工商網監
評論