 自動駕駛攝像頭與工業相機中的短波紅外新秀
自動駕駛攝像頭與工業相機中的短波紅外新秀

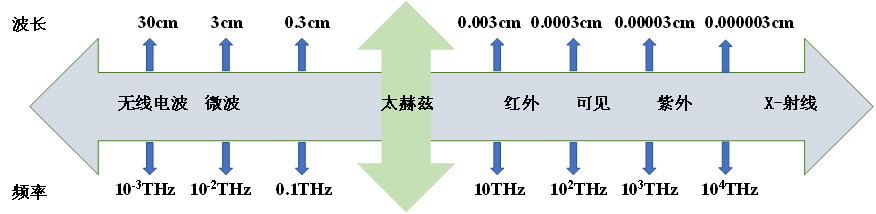
電子發燒友網報道(文/周凱揚)在追求高精度自動視覺檢測的圖像傳感器中,我們常常提到紅外這一波段。要想進一步細分的話,往往750nm到1000nm的波段范圍稱為近紅外(NIR),而1000nm到1600nm之間的波段稱為短波紅外(SWIR)。
在短波紅外的波段下,這類傳感器得以看到不少與傳統CMOS圖像傳感器不同的畫面,其成像或對比結果可以直接用于自動視覺檢測中,且無需較高的像素,比如晶圓制造中的薄膜工藝,或是智能穿戴設備的溫度監測。
而最近不少廠商都在進一步推動SWIR傳感器往低成本的方向走,從而盡快集成到更多消費和工業應用中去。除了基于鍺基的SWIR傳感器以外,也有選擇銦鎵砷材料的,不過后者在成本要更高一些,也成了阻礙其大規模普及的痛點之一。
短波紅外波段下的超高量子效率
SWIR圖像傳感器的一大特色就是,在短波紅外波段去追求最大的量子效率。索尼在2020年發布了兩款廣譜銦鎵砷圖像傳感器,IMX990和IMX991,分別是一款1/2英寸134萬有限像素和1/4英寸34萬有效像素的SWIR圖像傳感器。
索尼的這兩款傳感器,就能在1200nm下做到大于75%的量子效率,即便是在可見光波段下,其相對量子效率也不會低于0.7。此外,索尼的SWIR圖像傳感器與其他產品一樣,已經集成了片上ADC等功能,所以可以直接實現數字輸出,加速相關相機產品的開發。
至于上面提到的銦鎵砷成本問題,索尼似乎選擇了D2W的混合封裝方案,利用混合鍵合技術,將銦鎵砷探測器轉移到硅探測器讀出芯片上。這一設計方案不僅顯著降低了制造成本,也同樣縮小了像素尺寸,做到了5微米,得以輸出更高的解像度。
自動駕駛的傳感器融合中也有SWIR一席之地?
在自動駕駛的傳感器融合策略中,現有的VIS攝像頭往往用于檢測路面標識、交通標志、車輛和行人等,毫米波等雷達傳感器則用于測量物體的距離和速度,激光雷達則是用于實現更高分辨率的測量。
但無論是VIS攝像頭還是激光雷達,都存在一定的痛點,比如VIS攝像頭在夜晚與濃霧風沙天氣喜愛的局限性,或是激光雷達高昂的成本、更大的體積等等。可如果我們考慮將SWIR作為視覺補充的話,這些痛點就一并解決了。
SWIR圖像傳感器不必去負責VIS攝像頭傳感器的工作,它只需要解決眩光、惡劣天氣和夜間這類場景下的感知問題就好。而且SWIR圖像傳感器還有勝過VIS與激光雷達的一點,那就是它是可以置于車內的,諸如反射之類的顏色干擾根本不會對其造成影響,因為它可以通過頻譜響應直接對材料進行判斷,所以也無需像激光雷達和傳統ADAS攝像頭那樣,為了最大化成像清晰度和分辨率必須置于車外。
Trieye的Raven就是這樣一款面向汽車/ADAS應用的鍺基SWIR圖像傳感器,像素量達到120萬,同時覆蓋了400nm到1600nm的可見光+SWIR波段,最大輸出規格可達1284x960分辨率和120FPS。
小結
SWIR圖像傳感器無疑在工業與自動駕駛領域有著相當大的潛力,即便是索尼這樣的巨頭也都開始布局。更重要的是,SWIR圖像傳感器以目前的參數水平來說,還有很大的提升空間。索尼SWIR的官方開發人員也提到,如果加入AI技術,可以進一步提高傳感器的精度,這也是當下所有圖像傳感器未來的開發方向。
在短波紅外的波段下,這類傳感器得以看到不少與傳統CMOS圖像傳感器不同的畫面,其成像或對比結果可以直接用于自動視覺檢測中,且無需較高的像素,比如晶圓制造中的薄膜工藝,或是智能穿戴設備的溫度監測。
而最近不少廠商都在進一步推動SWIR傳感器往低成本的方向走,從而盡快集成到更多消費和工業應用中去。除了基于鍺基的SWIR傳感器以外,也有選擇銦鎵砷材料的,不過后者在成本要更高一些,也成了阻礙其大規模普及的痛點之一。
短波紅外波段下的超高量子效率
SWIR圖像傳感器的一大特色就是,在短波紅外波段去追求最大的量子效率。索尼在2020年發布了兩款廣譜銦鎵砷圖像傳感器,IMX990和IMX991,分別是一款1/2英寸134萬有限像素和1/4英寸34萬有效像素的SWIR圖像傳感器。
索尼的這兩款傳感器,就能在1200nm下做到大于75%的量子效率,即便是在可見光波段下,其相對量子效率也不會低于0.7。此外,索尼的SWIR圖像傳感器與其他產品一樣,已經集成了片上ADC等功能,所以可以直接實現數字輸出,加速相關相機產品的開發。
至于上面提到的銦鎵砷成本問題,索尼似乎選擇了D2W的混合封裝方案,利用混合鍵合技術,將銦鎵砷探測器轉移到硅探測器讀出芯片上。這一設計方案不僅顯著降低了制造成本,也同樣縮小了像素尺寸,做到了5微米,得以輸出更高的解像度。
自動駕駛的傳感器融合中也有SWIR一席之地?
在自動駕駛的傳感器融合策略中,現有的VIS攝像頭往往用于檢測路面標識、交通標志、車輛和行人等,毫米波等雷達傳感器則用于測量物體的距離和速度,激光雷達則是用于實現更高分辨率的測量。
但無論是VIS攝像頭還是激光雷達,都存在一定的痛點,比如VIS攝像頭在夜晚與濃霧風沙天氣喜愛的局限性,或是激光雷達高昂的成本、更大的體積等等。可如果我們考慮將SWIR作為視覺補充的話,這些痛點就一并解決了。
SWIR圖像傳感器不必去負責VIS攝像頭傳感器的工作,它只需要解決眩光、惡劣天氣和夜間這類場景下的感知問題就好。而且SWIR圖像傳感器還有勝過VIS與激光雷達的一點,那就是它是可以置于車內的,諸如反射之類的顏色干擾根本不會對其造成影響,因為它可以通過頻譜響應直接對材料進行判斷,所以也無需像激光雷達和傳統ADAS攝像頭那樣,為了最大化成像清晰度和分辨率必須置于車外。
Trieye的Raven就是這樣一款面向汽車/ADAS應用的鍺基SWIR圖像傳感器,像素量達到120萬,同時覆蓋了400nm到1600nm的可見光+SWIR波段,最大輸出規格可達1284x960分辨率和120FPS。
小結
SWIR圖像傳感器無疑在工業與自動駕駛領域有著相當大的潛力,即便是索尼這樣的巨頭也都開始布局。更重要的是,SWIR圖像傳感器以目前的參數水平來說,還有很大的提升空間。索尼SWIR的官方開發人員也提到,如果加入AI技術,可以進一步提高傳感器的精度,這也是當下所有圖像傳感器未來的開發方向。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
自動駕駛
+關注
關注
793文章
14883瀏覽量
179900
發布評論請先 登錄
相關推薦
熱點推薦
高清數字攝像頭視頻卡頓?黑屏?
一前言伴隨電動汽車技術的蓬勃發展,人們對高級駕駛輔助系統(ADAS)與自動駕駛的需求日益增長。在汽車領域,數字高清攝像頭逐步取代傳統模擬攝像頭,憑借在性能、可靠性、系統集成度等方面的顯

自動駕駛汽車如何依靠攝像頭判斷距離?
[首發于智駕最前沿微信公眾號]車載攝像頭在自動駕駛中,就像是“看見世界”的眼睛,其主要任務是把外界的光學信息轉換成計算機能理解的像素數據,再通過一系列算法,從這些像素中提煉出“有什么物體、在什么位置

自動駕駛攝像頭要如何做標定?
問題在拍照時影響并不大,但是對于自動駕駛攝像頭來說,如果出現這些問題,就會讓自動駕駛汽車無法看懂世界,無法判斷距離,使得小偏差變成大問題。
自動駕駛中提到的“深度相機”是個啥?
自動駕駛的實現離不開各類傳感器的支持,其中純視覺方案成為很多技術方案的選擇,但由于攝像頭無法感知到環境深度信息,因此有部分技術方案提到了“深度相機”的技術。
自動駕駛既然有雙目攝像頭了,為什么還要三目攝像頭?
[首發于智駕最前沿微信公眾號]在自動駕駛領域,純視覺方案一直受到不少人的認可。雙目攝像頭由于模擬了人眼的工作方式,能夠通過視差計算還原三維信息,在距離判斷和空間感知上具有天然優勢,因此被廣泛應用于純

決定自動駕駛攝像頭質量的因素有哪些?
[首發于智駕最前沿微信公眾號]攝像頭在自動駕駛系統中的作用非常重要,并不是簡單的“多拍幾張照片就行”的設備,它更像是一整套從光學到電子再到軟件的感知子系統。把一塊光學玻璃、一片圖像傳感器、一套ISP

如何確保自動駕駛汽車感知的準確性?
感知的定義及原理 在聊這個話題之前,我們先聊一聊感知是什么,自動駕駛感知系統就是一個把外界變成機器可用信息的工程流水線。感知系統的輸入主要依靠如攝像頭(可見光、近紅外)、激光雷達(LiDAR)、毫米波雷達(RADAR)、超聲

激光振鏡掃描錫焊技術在車載攝像頭模組中的應用
車載攝像頭模組是汽車智能駕駛系統的核心視覺傳感器,集成了光學成像、光電轉換、信號處理等模塊,為ADAS(高級駕駛輔助系統)和自動駕駛提供實時環境感知數據。激光振鏡掃描錫焊技術在車載
紅外攝像頭模組是什么?科技時代的眼睛
在現代科技迅速發展的背景下,紅外攝像頭模組逐漸成為各類智能設備中的重要組成部分。無論是在安防監控、智能家居還是汽車領域,紅外攝像頭模組以其獨

索尼FCB-EV9520L攝像頭:賦能自動駕駛新體驗
在自動駕駛技術飛速發展的當下,索尼FCB-EV9520L攝像頭憑借其卓越性能,正成為眾多自動駕駛解決方案中不可或缺的關鍵組件,為自動駕駛車輛
一文聊聊自動駕駛攝像頭
[首發于智駕最前沿微信公眾號]自動駕駛車輛的攝像頭是感知模塊的重要組成,其成本低、分辨率高且能捕捉豐富的語義信息,使其在車道識別、障礙物檢測、交通標志和信號燈識別等任務中不可或缺。不同類型的攝

看不見的光,看得見的細節:短波紅外工業相機的神秘力量!
隨著市場需求的挖掘和機器視覺技術的發展,短波紅外工業相機在工業、醫療、食品等領域的應用越來越廣泛。其中半導體檢測和食品檢測是兩大主要應用市場




 工商網監
工商網監
評論