") 伺服的電機(jī)轉(zhuǎn)矩、功率、轉(zhuǎn)速、電壓、電流換算公式
伺服的電機(jī)轉(zhuǎn)矩、功率、轉(zhuǎn)速、電壓、電流換算公式

電動(dòng)機(jī)輸出轉(zhuǎn)矩:
使機(jī)械元件轉(zhuǎn)動(dòng)的力矩稱為轉(zhuǎn)動(dòng)力矩,簡(jiǎn)稱轉(zhuǎn)矩。機(jī)械元件在轉(zhuǎn)矩作用下都會(huì)產(chǎn)生一定程度的扭轉(zhuǎn)變形,故轉(zhuǎn)矩有時(shí)又稱為扭矩。
轉(zhuǎn)矩(T)=9550*功率(P)/轉(zhuǎn)速(n)
即:T=9550P/n—公式【1】
由此可推導(dǎo)出:
轉(zhuǎn)矩=9550*功率/轉(zhuǎn)速
功率=轉(zhuǎn)速*轉(zhuǎn)矩/9550,即:
P=Tn/9550——公式【2】
即:P=F*V---————公式【3】
轉(zhuǎn)矩(T)=扭力(F)*作用半徑(R)
推出:F=T/R---——公式【4】
將公式【4】、【5】代入公式【3】得:
P=F*V=(T/R)*(πRn/30)=Tπn/30
P=功率單位W,
T=轉(zhuǎn)矩單位N.m,
n=每分鐘轉(zhuǎn)速單位轉(zhuǎn)/分鐘; 如果將P的單位換成KW,
那么就是如下公式:
P*1000=Tπn/30;
P*1000*30/π=Tn;
(30000/3.1415926)*P=T*n;
9549.297*P=T*n。
這就是為什么會(huì)有功率和轉(zhuǎn)矩*轉(zhuǎn)速之間有個(gè)9550的系數(shù)關(guān)系。
電動(dòng)機(jī)轉(zhuǎn)矩、轉(zhuǎn)速、電壓、電流之間的關(guān)系
由于電功率P=電壓U*電流I,即P=UI————公式【6】
由于公式【2】中的功率P的單位為kw,而電壓U的單位是V,電流I的單位是A,而UI乘積的單位是V.A,即w,所以將公式【6】代入到公式【2】中時(shí),UI需要除以1000以統(tǒng)一單位。
則:
P=Tn/9550=UI/1000————公式【7】
==》Tn/9.55=UI————公式【8】
==》T=9.55UI/n————公式【9】
==》U=Tn/9.55I————公式【10】
==》I=9.55U/Tn————公式【11】
 ?轉(zhuǎn)矩的類型:轉(zhuǎn)矩可分為靜態(tài)轉(zhuǎn)矩和動(dòng)態(tài)轉(zhuǎn)矩。
※靜態(tài)轉(zhuǎn)矩
?轉(zhuǎn)矩的類型:轉(zhuǎn)矩可分為靜態(tài)轉(zhuǎn)矩和動(dòng)態(tài)轉(zhuǎn)矩。
※靜態(tài)轉(zhuǎn)矩
靜態(tài)轉(zhuǎn)矩是值不隨時(shí)間延長(zhǎng)而變化或變化很小、很緩慢的轉(zhuǎn)矩,包括靜止轉(zhuǎn)矩、恒定轉(zhuǎn)矩、緩變轉(zhuǎn)矩和微脈動(dòng)轉(zhuǎn)矩。
靜止轉(zhuǎn)矩的值為常數(shù),傳動(dòng)軸不旋轉(zhuǎn);
恒定轉(zhuǎn)矩的值為常數(shù),但傳動(dòng)軸以勻速旋轉(zhuǎn),如電機(jī)穩(wěn)定工作時(shí)的轉(zhuǎn)矩;
緩變轉(zhuǎn)矩的值隨時(shí)間延長(zhǎng)而緩慢變化,但在短時(shí)間內(nèi)可認(rèn)為轉(zhuǎn)矩值是不變的;
微脈動(dòng)轉(zhuǎn)矩的瞬時(shí)值有幅度不大的脈動(dòng)變化。※動(dòng)態(tài)轉(zhuǎn)矩
動(dòng)態(tài)轉(zhuǎn)矩值是隨時(shí)間延長(zhǎng)而變化很大的轉(zhuǎn)矩,包括振動(dòng)轉(zhuǎn)矩、過(guò)渡轉(zhuǎn)矩和隨機(jī)轉(zhuǎn)矩三種。
振動(dòng)轉(zhuǎn)矩的值是周期性波動(dòng)的;
過(guò)渡轉(zhuǎn)矩是機(jī)械從一種工況轉(zhuǎn)換到另一種工況時(shí)的轉(zhuǎn)矩變化
過(guò)程;隨機(jī)轉(zhuǎn)矩是一種不確定的、變化無(wú)規(guī)律的轉(zhuǎn)矩。
使機(jī)械元件轉(zhuǎn)動(dòng)的力矩稱為轉(zhuǎn)動(dòng)力矩,簡(jiǎn)稱轉(zhuǎn)矩。機(jī)械元件在轉(zhuǎn)矩作用下都會(huì)產(chǎn)生一定程度的扭轉(zhuǎn)變形,故轉(zhuǎn)矩有時(shí)又稱為扭矩。
轉(zhuǎn)矩與功率及轉(zhuǎn)速的關(guān)系:
轉(zhuǎn)矩(T)=9550*功率(P)/轉(zhuǎn)速(n)
即:T=9550P/n—公式【1】
由此可推導(dǎo)出:
轉(zhuǎn)矩=9550*功率/轉(zhuǎn)速
功率=轉(zhuǎn)速*轉(zhuǎn)矩/9550,即:
P=Tn/9550——公式【2】
方程式中:
P—功率的單位(kW);
n—轉(zhuǎn)速的單位(r/min);
T—轉(zhuǎn)矩的單位(N.m);
9550是計(jì)算系數(shù)。
| 功率kw | 轉(zhuǎn)速rpm | 扭矩Nm |
| 0.05 | 3000 | 0.16 |
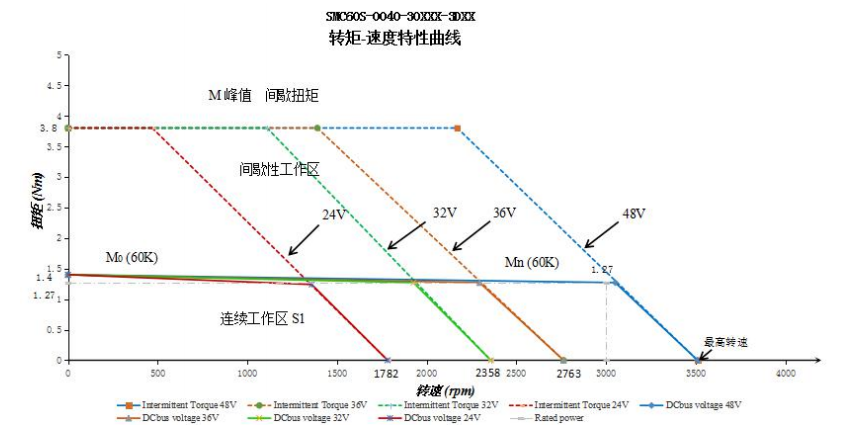
| 0.4 | 3000 | 1.27 |
| 0.75 | 3000 | 2.39 |
| 1 | 3000 | 3.18 |
| 1.2 | 3000 | 3.82 |
| 1.5 | 3000 | 4.78 |
電機(jī)扭矩計(jì)算公式 T=9550P/n 是如何計(jì)算的呢?
分析:功率=力*速度即:P=F*V---————公式【3】
轉(zhuǎn)矩(T)=扭力(F)*作用半徑(R)
推出:F=T/R---——公式【4】
線速度(V)=2πR*每秒轉(zhuǎn)速(轉(zhuǎn)/秒)=2πR*每分轉(zhuǎn)速(n/分)/60=(πRn/30)/分---——公式【5】
將公式【4】、【5】代入公式【3】得:
P=F*V=(T/R)*(πRn/30)=Tπn/30
P=功率單位W,
T=轉(zhuǎn)矩單位N.m,
n=每分鐘轉(zhuǎn)速單位轉(zhuǎn)/分鐘; 如果將P的單位換成KW,
那么就是如下公式:
P*1000=Tπn/30;
P*1000*30/π=Tn;
(30000/3.1415926)*P=T*n;
9549.297*P=T*n。
這就是為什么會(huì)有功率和轉(zhuǎn)矩*轉(zhuǎn)速之間有個(gè)9550的系數(shù)關(guān)系。
電動(dòng)機(jī)轉(zhuǎn)矩、轉(zhuǎn)速、電壓、電流之間的關(guān)系
由于電功率P=電壓U*電流I,即P=UI————公式【6】
由于公式【2】中的功率P的單位為kw,而電壓U的單位是V,電流I的單位是A,而UI乘積的單位是V.A,即w,所以將公式【6】代入到公式【2】中時(shí),UI需要除以1000以統(tǒng)一單位。
則:
P=Tn/9550=UI/1000————公式【7】
==》Tn/9.55=UI————公式【8】
==》T=9.55UI/n————公式【9】
==》U=Tn/9.55I————公式【10】
==》I=9.55U/Tn————公式【11】
方程式【7】、【8】、【9】、【10】、【11】中:
P—功率的單位(kW);
n—轉(zhuǎn)速的單位(r/min);
T—轉(zhuǎn)矩的單位(N.m);
U—電壓的單位(V);
I—電流的單位(A);
9.55是9500÷1000之后的值。
?轉(zhuǎn)矩的類型:轉(zhuǎn)矩可分為靜態(tài)轉(zhuǎn)矩和動(dòng)態(tài)轉(zhuǎn)矩。
※靜態(tài)轉(zhuǎn)矩靜態(tài)轉(zhuǎn)矩是值不隨時(shí)間延長(zhǎng)而變化或變化很小、很緩慢的轉(zhuǎn)矩,包括靜止轉(zhuǎn)矩、恒定轉(zhuǎn)矩、緩變轉(zhuǎn)矩和微脈動(dòng)轉(zhuǎn)矩。
靜止轉(zhuǎn)矩的值為常數(shù),傳動(dòng)軸不旋轉(zhuǎn);
恒定轉(zhuǎn)矩的值為常數(shù),但傳動(dòng)軸以勻速旋轉(zhuǎn),如電機(jī)穩(wěn)定工作時(shí)的轉(zhuǎn)矩;
緩變轉(zhuǎn)矩的值隨時(shí)間延長(zhǎng)而緩慢變化,但在短時(shí)間內(nèi)可認(rèn)為轉(zhuǎn)矩值是不變的;
微脈動(dòng)轉(zhuǎn)矩的瞬時(shí)值有幅度不大的脈動(dòng)變化。※動(dòng)態(tài)轉(zhuǎn)矩
動(dòng)態(tài)轉(zhuǎn)矩值是隨時(shí)間延長(zhǎng)而變化很大的轉(zhuǎn)矩,包括振動(dòng)轉(zhuǎn)矩、過(guò)渡轉(zhuǎn)矩和隨機(jī)轉(zhuǎn)矩三種。
振動(dòng)轉(zhuǎn)矩的值是周期性波動(dòng)的;
過(guò)渡轉(zhuǎn)矩是機(jī)械從一種工況轉(zhuǎn)換到另一種工況時(shí)的轉(zhuǎn)矩變化
過(guò)程;隨機(jī)轉(zhuǎn)矩是一種不確定的、變化無(wú)規(guī)律的轉(zhuǎn)矩。
審核編輯 :李倩
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
電動(dòng)機(jī)
+關(guān)注
關(guān)注
75文章
4197瀏覽量
101499 -
伺服
+關(guān)注
關(guān)注
17文章
693瀏覽量
43369 -
電機(jī)轉(zhuǎn)矩
+關(guān)注
關(guān)注
0文章
22瀏覽量
7401
原文標(biāo)題:伺服的電機(jī)轉(zhuǎn)矩、功率、轉(zhuǎn)速、電壓、電流換算公式,只要記住這個(gè)就夠了
文章出處:【微信號(hào):玩轉(zhuǎn)PLC工業(yè)機(jī)器人,微信公眾號(hào):玩轉(zhuǎn)PLC工業(yè)機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
變頻電機(jī)的恒轉(zhuǎn)矩運(yùn)行和恒功率運(yùn)行
原理 ? 變頻電機(jī)在基頻以下(通常為0-50Hz)通過(guò)電壓/頻率(V/f)協(xié)調(diào)控制,保持氣隙磁通恒定。當(dāng)負(fù)載轉(zhuǎn)矩需求穩(wěn)定時(shí),電機(jī)輸出轉(zhuǎn)矩與定

變頻器頻率和電機(jī)轉(zhuǎn)速關(guān)系
、電機(jī)轉(zhuǎn)速與電源頻率的理論基礎(chǔ) 根據(jù)異步電動(dòng)機(jī)的基本原理,其同步轉(zhuǎn)速(即旋轉(zhuǎn)磁場(chǎng)的轉(zhuǎn)速)由以下公式決定: [ n_s = frac{60 t
功率分析儀電壓、電流及功率采集計(jì)算原理詳解
功率分析儀作為電力電子、電機(jī)驅(qū)動(dòng)、新能源等領(lǐng)域的關(guān)鍵測(cè)試設(shè)備,其核心功能是精確測(cè)量電壓、電流信號(hào)并計(jì)算各種功率參數(shù)。我們將深入探討
基于無(wú)刷直流電機(jī)的積分變結(jié)構(gòu)控制器抑制轉(zhuǎn)矩脈動(dòng)
摘 要:文章基于無(wú)刷直流電機(jī)設(shè)計(jì)了一種積分變結(jié)構(gòu)(IVSC)控制器,以抑制轉(zhuǎn)矩脈動(dòng)。在利用傳統(tǒng)電流控制技術(shù)中,如果反電動(dòng)勢(shì)(EMF)是一種非理想的梯形波,則較易導(dǎo)致轉(zhuǎn)矩脈動(dòng)。基于此,文
發(fā)表于 07-29 16:24
含轉(zhuǎn)矩閉環(huán)的異步電機(jī)微分先行PID雙模糊自整定矢量控制系統(tǒng)
控制系統(tǒng)來(lái)改善輸出轉(zhuǎn)矩性能,并采用微分先行的 PID 雙模糊自整定控制器代替系統(tǒng)轉(zhuǎn)速和磁鏈的 門(mén) 控制器來(lái)改善控制性能的伺服系統(tǒng)。最后通過(guò) Maab/sinmink搭建模型進(jìn)行仿真,結(jié)果表明,輸出
發(fā)表于 07-25 14:21
效率最優(yōu)的感應(yīng)電機(jī)無(wú)差拍直接轉(zhuǎn)矩控制
摘要:提出了一種感應(yīng)電機(jī)無(wú)差拍直接轉(zhuǎn)矩控制系統(tǒng)的效率最優(yōu)控制方法。在定子磁鏈定向坐標(biāo)系中以定子磁鏈和轉(zhuǎn)子磁鏈為狀態(tài)變量,導(dǎo)出了空間矢量無(wú)差拍直接轉(zhuǎn)矩控制的電壓控制律。分析了
發(fā)表于 07-16 19:02
無(wú)轉(zhuǎn)速傳感器抽油電機(jī)扭矩在線監(jiān)測(cè)系統(tǒng)研究
介紹了一種無(wú)轉(zhuǎn)速傳感器抽油機(jī)異步電機(jī)的在線監(jiān)測(cè)系統(tǒng)的軟、硬件設(shè)計(jì)。論述了通過(guò)實(shí)時(shí)采集抽油機(jī)異步電機(jī)的三相電壓和電流,計(jì)算
發(fā)表于 07-14 17:56
無(wú)刷直流電機(jī)改進(jìn)型直接轉(zhuǎn)矩控制研究
摘要:研究了120”導(dǎo)通方式下的無(wú)刷直流電機(jī)直接轉(zhuǎn)矩控制策略。通過(guò)分析了無(wú)刷直流電機(jī)轉(zhuǎn)矩特性知道,只要保持定子磁鏈幅值恒定并控制其旋轉(zhuǎn)速度就
發(fā)表于 06-27 16:45
【電磁兼容單位換算】EMC常用單位轉(zhuǎn)換公式推導(dǎo)
【電磁兼容單位換算】EMC常用單位轉(zhuǎn)換公式推導(dǎo)

三相異步電機(jī)直接轉(zhuǎn)矩控制的圓形磁鏈研究
產(chǎn)生PWM波,并通過(guò)改變轉(zhuǎn)速給定值,得出在不同給定條件下的仿真結(jié)果,并用濾波器對(duì)定子電流進(jìn)行濾波,最后對(duì)仿真結(jié)果進(jìn)行了具體分析。這對(duì)中小功率電機(jī)控制系統(tǒng)實(shí)際開(kāi)發(fā)應(yīng)用等方面有一定的實(shí)用價(jià)
發(fā)表于 06-16 21:50
三相開(kāi)關(guān)磁阻電機(jī)直接轉(zhuǎn)矩控制系統(tǒng)的研究
電壓矢量表確定功率變換器的觸發(fā)相位,使電機(jī)運(yùn)行。在MATLAB/Simulink環(huán)境下,進(jìn)行了開(kāi)關(guān)磁阻電機(jī)直接轉(zhuǎn)矩控制算法的仿真實(shí)驗(yàn)。結(jié)果表
發(fā)表于 06-13 09:35
使用 dsPIC30F 實(shí)現(xiàn) BLDC 電機(jī)的正弦電壓驅(qū)動(dòng)
簡(jiǎn)介
在 BLDC 電機(jī)應(yīng)用中,由于存在噪音和轉(zhuǎn)矩脈動(dòng)問(wèn)題,使用三相正弦波電壓代替六拍電壓是一種理想的控制方法。本文檔介紹的應(yīng)用軟件利用 dsPIC30F 數(shù)字信號(hào)控制器高效且可靠地實(shí)
發(fā)表于 05-14 15:56
為什么直流力矩電動(dòng)機(jī)轉(zhuǎn)矩大、轉(zhuǎn)速低?
直流力矩電動(dòng)機(jī)是一種特殊設(shè)計(jì)的直流電機(jī),其核心特點(diǎn)在于能夠提供大轉(zhuǎn)矩而保持較低的轉(zhuǎn)速。這種特性使其在需要精確控制和高扭矩輸出的場(chǎng)合(如機(jī)器人關(guān)節(jié)、航空航天設(shè)備、醫(yī)療儀器等)中具有不可替代的優(yōu)勢(shì)。要

為什么提高電機(jī)的電壓時(shí),轉(zhuǎn)速會(huì)隨之上升?
的旋轉(zhuǎn)力(轉(zhuǎn)矩)是由施加的電壓和電機(jī)的轉(zhuǎn)速共同決定的(因?yàn)?b class='flag-5'>轉(zhuǎn)矩與電流成正比,而該
發(fā)表于 04-16 13:44
永磁同步電機(jī)的內(nèi)模直接轉(zhuǎn)矩控制
摘要:傳統(tǒng)的直接轉(zhuǎn)矩控制(DTC)存在轉(zhuǎn)矩脈動(dòng)大,轉(zhuǎn)速 PI 調(diào)節(jié)器的參數(shù)整定繁瑣等缺點(diǎn) 。結(jié)合電壓空 間矢量脈寬調(diào)制(SVPWM)和內(nèi)模控制的優(yōu)點(diǎn),將內(nèi)模控制器引入永磁同步
發(fā)表于 03-26 14:21



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論