") 點(diǎn)云配準(zhǔn)任務(wù)中的點(diǎn)特征與一般點(diǎn)特征的區(qū)別在哪里?
點(diǎn)云配準(zhǔn)任務(wù)中的點(diǎn)特征與一般點(diǎn)特征的區(qū)別在哪里?

0.筆者個人體會:這個工作來自于華中科技大學(xué),發(fā)表于ICCV 2021。這個工作聚焦于點(diǎn)云的點(diǎn)特征表示學(xué)習(xí),但是,與一般的點(diǎn)特征學(xué)習(xí)方法并不一樣。我們知道,基于深度學(xué)習(xí)的三維點(diǎn)云處理已經(jīng)在近年來得到了廣發(fā)關(guān)注,從先驅(qū)性的工作例如PointNet到近期的Point Transformer等。這些工作都能有效的學(xué)習(xí)點(diǎn)特征表示。但是,這些方法學(xué)習(xí)點(diǎn)特征都是基于輸入的某一個點(diǎn)云而言的,所有的操作也都集中在一個點(diǎn)云上,并且追求特征的描述性,力求能準(zhǔn)確表示三維點(diǎn)云的局部幾何結(jié)構(gòu)。但是,這篇論文針對點(diǎn)云配準(zhǔn)工作提出了另一種點(diǎn)云設(shè)計(jì)方式。我們知道配準(zhǔn)的目的是求解輸入的點(diǎn)云對之間的相對變換以使它們最好的對齊,在這個過程中,聚焦于用學(xué)到的點(diǎn)特征表示構(gòu)造可靠的匹配對。為此,對于點(diǎn)特征的魯棒性需求也很重要。為了實(shí)現(xiàn)這個目的,本工作提出從輸入的兩個點(diǎn)云出發(fā),利用這兩個點(diǎn)云之間的交互進(jìn)一步調(diào)整點(diǎn)特征學(xué)習(xí),使得到的點(diǎn)特征表示源于同時感知到當(dāng)前點(diǎn)云和另一個需要配對的點(diǎn)云,從而追求正確的匹配點(diǎn)的可匹配性的提升。也就是說這是一個針對特定任務(wù)而設(shè)計(jì)的點(diǎn)特征學(xué)習(xí)方法,或許此方法學(xué)到的點(diǎn)特征難以應(yīng)用到其他任務(wù),例如分類、分割等,但對于匹配、配準(zhǔn)而言應(yīng)該更加適用。1、論文相關(guān)內(nèi)容介紹:論文標(biāo)題:? ?Feature Interactive Representation for Point Cloud Registration作者列表:? ? ?Bingli Wu, Jie Ma, Gaojie Chen, Pei An摘要:點(diǎn)云配準(zhǔn)是使用兩個點(diǎn)云中的共同結(jié)構(gòu)將它們拼接在一起。為了找出這些共同的結(jié)構(gòu)并使這些結(jié)構(gòu)更準(zhǔn)確地匹配,源點(diǎn)云和目標(biāo)點(diǎn)云的交互信息是必不可少的。然而,當(dāng)前對顯式建模這種特征交互的關(guān)注有限。為此,我們提出了一個特征交互表示學(xué)習(xí)網(wǎng)絡(luò),它可以從不同層次探索源點(diǎn)云和目標(biāo)點(diǎn)云之間的特征交互。具體來說,我們首先介紹了一種基于點(diǎn)云內(nèi)特征交互的組合特征編碼器(CFE)。CFE提取每個點(diǎn)云內(nèi)的交互特征并將它們組合起來以增強(qiáng)網(wǎng)絡(luò)描述局部幾何結(jié)構(gòu)的能力。然后,我們提出了一種點(diǎn)云間的特征交互機(jī)制,它包括一個局部交互單元(LIU)和一個全局交互單元(GIU)。前者用于跨兩個點(diǎn)云的點(diǎn)對之間的信息交互,從而使一個點(diǎn)云中的點(diǎn)特征與另一個點(diǎn)云中的相似點(diǎn)特征能夠相互感知。后者用于根據(jù)兩個點(diǎn)云的全局交互信息調(diào)整每個點(diǎn)特征,因此一個點(diǎn)云具有對另一個點(diǎn)云的全局感知。對部分重疊點(diǎn)云配準(zhǔn)的大量實(shí)驗(yàn)表明,我們的方法實(shí)現(xiàn)了最先進(jìn)的性能。主要貢獻(xiàn):1)我們提出了一種組合特征編碼器來提取局部區(qū)域的交互特征,其通過結(jié)合不同層的特征,增強(qiáng)網(wǎng)絡(luò)提取局部幾何和語義信息的能力。2)我們設(shè)計(jì)了一種新穎的點(diǎn)云間特征交互機(jī)制,使每個點(diǎn)云都具有另一個點(diǎn)云的上下文感知,從而為后續(xù)模塊提供更具辨別力的特征3)我們的端到端 FIRE-Net在多種實(shí)驗(yàn)設(shè)置下于 ModelNet40 基準(zhǔn)數(shù)據(jù)集上實(shí)現(xiàn)了最先進(jìn)的性能,從而證明了其有效性和泛化能力。方法介紹:給定輸入點(diǎn)云

, ,我們的目標(biāo)是求解旋轉(zhuǎn)矩陣
,我們的目標(biāo)是求解旋轉(zhuǎn)矩陣 和平移向量
和平移向量 以實(shí)現(xiàn)輸入點(diǎn)云最好的對齊。Fig1展示了我們的FIRE-Net的整體流程。簡要地說,我們的網(wǎng)絡(luò)的輸入包括源和目標(biāo)原始點(diǎn)云。組合特征編碼器(CFE)首先提取源和目標(biāo)的初始特征,將所有點(diǎn)編碼到一個公共特征空間中。然后,設(shè)計(jì)了一個局部交互單元(LIU)和一個全局交互單元(GIU)來建模點(diǎn)云間的特征交互。最終的交互特征被送到關(guān)鍵點(diǎn)層以選擇兩個點(diǎn)云中的公共結(jié)構(gòu)。最后,我們使用剛性變換計(jì)算模塊以迭代的方式來獲得可靠的對應(yīng)關(guān)系和計(jì)算剛性變換。每個模塊的詳細(xì)信息將在以下部分進(jìn)行說明。
以實(shí)現(xiàn)輸入點(diǎn)云最好的對齊。Fig1展示了我們的FIRE-Net的整體流程。簡要地說,我們的網(wǎng)絡(luò)的輸入包括源和目標(biāo)原始點(diǎn)云。組合特征編碼器(CFE)首先提取源和目標(biāo)的初始特征,將所有點(diǎn)編碼到一個公共特征空間中。然后,設(shè)計(jì)了一個局部交互單元(LIU)和一個全局交互單元(GIU)來建模點(diǎn)云間的特征交互。最終的交互特征被送到關(guān)鍵點(diǎn)層以選擇兩個點(diǎn)云中的公共結(jié)構(gòu)。最后,我們使用剛性變換計(jì)算模塊以迭代的方式來獲得可靠的對應(yīng)關(guān)系和計(jì)算剛性變換。每個模塊的詳細(xì)信息將在以下部分進(jìn)行說明。
,我們的目標(biāo)是求解旋轉(zhuǎn)矩陣和平移向量以實(shí)現(xiàn)輸入點(diǎn)云最好的對齊。Fig1展示了我們的FIRE-Net的整體流程。簡要地說,我們的網(wǎng)絡(luò)的輸入包括源和目標(biāo)原始點(diǎn)云。組合特征編碼器(CFE)首先提取源和目標(biāo)的初始特征,將所有點(diǎn)編碼到一個公共特征空間中。然后,設(shè)計(jì)了一個局部交互單元(LIU)和一個全局交互單元(GIU)來建模點(diǎn)云間的特征交互。最終的交互特征被送到關(guān)鍵點(diǎn)層以選擇兩個點(diǎn)云中的公共結(jié)構(gòu)。最后,我們使用剛性變換計(jì)算模塊以迭代的方式來獲得可靠的對應(yīng)關(guān)系和計(jì)算剛性變換。每個模塊的詳細(xì)信息將在以下部分進(jìn)行說明。
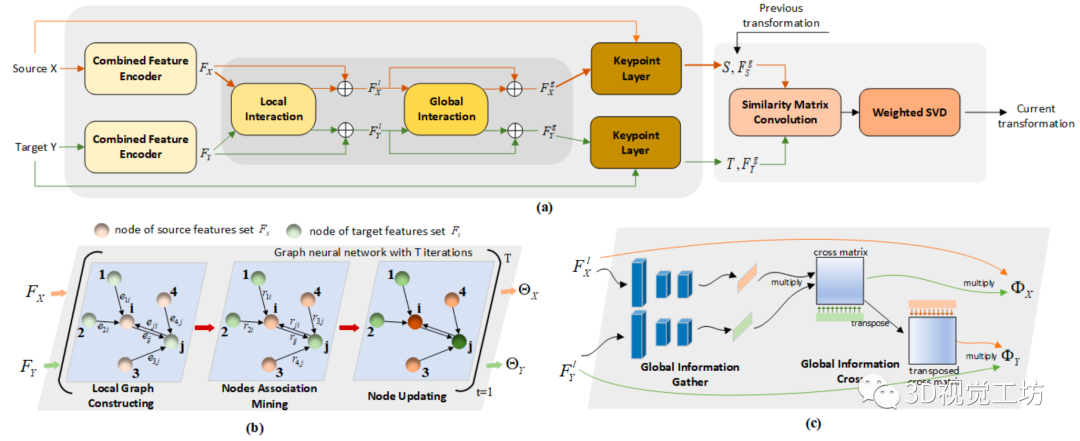
Fig1:(a)FIRE-Net的整體框架,(b)局部特征交互單元,(c)全局特征交互單元。一、組合特征編碼:CFE的主要目標(biāo)是描述源點(diǎn)云和目標(biāo)點(diǎn)云的局部結(jié)構(gòu)。同時,作為我們特征交互模型的第一級,CFE 實(shí)現(xiàn)了點(diǎn)云內(nèi)的特征交互。我們的 CFE 是一個基于 GNN 的網(wǎng)絡(luò),可以通過在3D坐標(biāo)空間中構(gòu)建固定圖并應(yīng)用串聯(lián)連接多層來分層的輸出來提取點(diǎn)的多級交互特征,其過程如圖2所示。

Fig2.組合特征編碼坐標(biāo)空間中的局部圖:為了表示給定點(diǎn)云的局部幾何結(jié)構(gòu),我們將每個點(diǎn)作為一個中心節(jié)點(diǎn),分別構(gòu)造一個kNN圖。
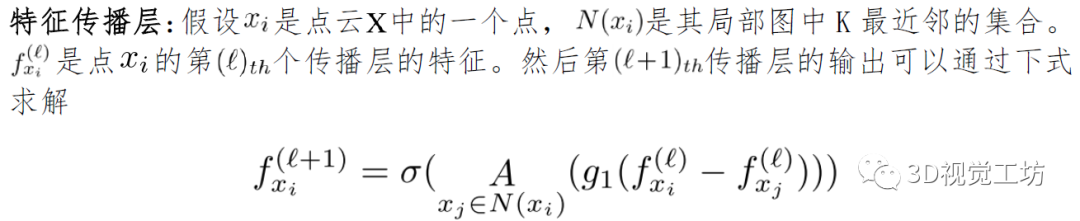
其中 是用于中心點(diǎn)及其近鄰點(diǎn)的相對特征的共享MLP。A是最大池化。σ是線性層。初始特征:為了增強(qiáng)模塊捕獲幾何和語義信息的能力,我們通過串接每個傳播層的輸出向量來合并低階和高階交互特征。最后,我們在串接的向量上應(yīng)用共享 MLP以獲得初始特征
是用于中心點(diǎn)及其近鄰點(diǎn)的相對特征的共享MLP。A是最大池化。σ是線性層。初始特征:為了增強(qiáng)模塊捕獲幾何和語義信息的能力,我們通過串接每個傳播層的輸出向量來合并低階和高階交互特征。最后,我們在串接的向量上應(yīng)用共享 MLP以獲得初始特征 和
和 。這個過程可以表述為:
。這個過程可以表述為:
是用于中心點(diǎn)及其近鄰點(diǎn)的相對特征的共享MLP。A是最大池化。σ是線性層。初始特征:為了增強(qiáng)模塊捕獲幾何和語義信息的能力,我們通過串接每個傳播層的輸出向量來合并低階和高階交互特征。最后,我們在串接的向量上應(yīng)用共享 MLP以獲得初始特征和 。這個過程可以表述為:

其中 是一個共享的 MLP。
是一個共享的 MLP。 表示
表示 層中的特征,L表示傳播層數(shù)。二、點(diǎn)云間的特征交互該模塊旨在對點(diǎn)云交互進(jìn)行建模,它由兩個串行單元組成:LIU學(xué)習(xí)局部交互函數(shù)以獲得局部交互特征
層中的特征,L表示傳播層數(shù)。二、點(diǎn)云間的特征交互該模塊旨在對點(diǎn)云交互進(jìn)行建模,它由兩個串行單元組成:LIU學(xué)習(xí)局部交互函數(shù)以獲得局部交互特征 。然后,GIU學(xué)習(xí)一個全局交互函數(shù)
。然后,GIU學(xué)習(xí)一個全局交互函數(shù) 得到全局特征交互
得到全局特征交互
是一個共享的 MLP。表示層中的特征,L表示傳播層數(shù)。二、點(diǎn)云間的特征交互該模塊旨在對點(diǎn)云交互進(jìn)行建模,它由兩個串行單元組成:LIU學(xué)習(xí)局部交互函數(shù)以獲得局部交互特征。然后,GIU學(xué)習(xí)一個全局交互函數(shù)得到全局特征交互

。請注意,我們將 和作為殘差項(xiàng),為可學(xué)習(xí)尺度參數(shù)和β和原始特征提供附加變化,即,
和作為殘差項(xiàng),為可學(xué)習(xí)尺度參數(shù)和β和原始特征提供附加變化,即,
和作為殘差項(xiàng),為可學(xué)習(xí)尺度參數(shù)和β和原始特征提供附加變化,即,

其中 和
和 是 LIU之后更新的特征、
是 LIU之后更新的特征、 和
和 是GIU之后更新的特征。1.局部特征交互單元:在CFE編碼了輸入點(diǎn)云到一個共同的特征空間的前提下,點(diǎn)云間的局部交互可以通過在特征空間上應(yīng)用GNN 來實(shí)現(xiàn)。特征空間的局部圖:在公共特征空間中,我們有M個源點(diǎn)云特征和N個目標(biāo)點(diǎn)云特征。我們首先構(gòu)造一個混合特征集
是GIU之后更新的特征。1.局部特征交互單元:在CFE編碼了輸入點(diǎn)云到一個共同的特征空間的前提下,點(diǎn)云間的局部交互可以通過在特征空間上應(yīng)用GNN 來實(shí)現(xiàn)。特征空間的局部圖:在公共特征空間中,我們有M個源點(diǎn)云特征和N個目標(biāo)點(diǎn)云特征。我們首先構(gòu)造一個混合特征集 ,然后將其中的每個特征
,然后將其中的每個特征 作為中心節(jié)點(diǎn)并應(yīng)用KNN 構(gòu)造局部圖
作為中心節(jié)點(diǎn)并應(yīng)用KNN 構(gòu)造局部圖 ,從而得到混合圖
,從而得到混合圖
和是 LIU之后更新的特征、和 是GIU之后更新的特征。1.局部特征交互單元:在CFE編碼了輸入點(diǎn)云到一個共同的特征空間的前提下,點(diǎn)云間的局部交互可以通過在特征空間上應(yīng)用GNN 來實(shí)現(xiàn)。特征空間的局部圖:在公共特征空間中,我們有M個源點(diǎn)云特征和N個目標(biāo)點(diǎn)云特征。我們首先構(gòu)造一個混合特征集,然后將其中的每個特征作為中心節(jié)點(diǎn)并應(yīng)用KNN 構(gòu)造局部圖,從而得到混合圖

。構(gòu)建局部圖有兩種策略:(1) 如圖 3左側(cè)所示,無論鄰居特征屬于 還是
還是 ,我們都連接中心節(jié)點(diǎn)與其鄰居節(jié)點(diǎn)之間的所有邊。(2) 如圖3右側(cè)所示,邊只在屬于不同點(diǎn)云的節(jié)點(diǎn)之間構(gòu)建。在局部圖中,我們將邊視為兩個節(jié)點(diǎn)間的關(guān)系,例如表示從
,我們都連接中心節(jié)點(diǎn)與其鄰居節(jié)點(diǎn)之間的所有邊。(2) 如圖3右側(cè)所示,邊只在屬于不同點(diǎn)云的節(jié)點(diǎn)之間構(gòu)建。在局部圖中,我們將邊視為兩個節(jié)點(diǎn)間的關(guān)系,例如表示從 到的關(guān)系。因此在圖3中,類型 1 對特征空間中的關(guān)系進(jìn)行了更全面的建模,而類型 2 比類型 1 更清楚地將消息從另一個點(diǎn)云傳遞到中心節(jié)點(diǎn)。
到的關(guān)系。因此在圖3中,類型 1 對特征空間中的關(guān)系進(jìn)行了更全面的建模,而類型 2 比類型 1 更清楚地將消息從另一個點(diǎn)云傳遞到中心節(jié)點(diǎn)。
有兩種策略:(1) 如圖 3左側(cè)所示,無論鄰居特征屬于還是,我們都連接中心節(jié)點(diǎn)與其鄰居節(jié)點(diǎn)之間的所有邊。(2) 如圖3右側(cè)所示,邊只在屬于不同點(diǎn)云的節(jié)點(diǎn)之間構(gòu)建。在局部圖中,我們將邊視為兩個節(jié)點(diǎn)間的關(guān)系,例如表示從到的關(guān)系。因此在圖3中,類型 1 對特征空間中的關(guān)系進(jìn)行了更全面的建模,而類型 2 比類型 1 更清楚地將消息從另一個點(diǎn)云傳遞到中心節(jié)點(diǎn)。
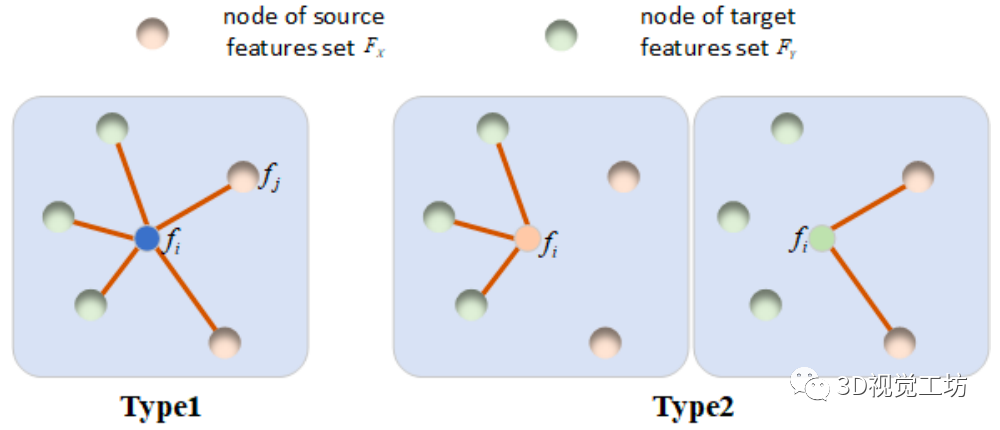
Fig3.特征空間的局部圖結(jié)構(gòu)節(jié)點(diǎn)關(guān)系挖掘:通過上面定義的局部圖,可以通過節(jié)點(diǎn)特征及其鄰居點(diǎn)特征的邊來挖掘節(jié)點(diǎn)關(guān)系,例如,使用 獲得關(guān)系向量
獲得關(guān)系向量 。為了找到更有效的關(guān)系函數(shù),我們研究了三種不同形式的關(guān)系函數(shù)。
。為了找到更有效的關(guān)系函數(shù),我們研究了三種不同形式的關(guān)系函數(shù)。
獲得關(guān)系向量。為了找到更有效的關(guān)系函數(shù),我們研究了三種不同形式的關(guān)系函數(shù)。
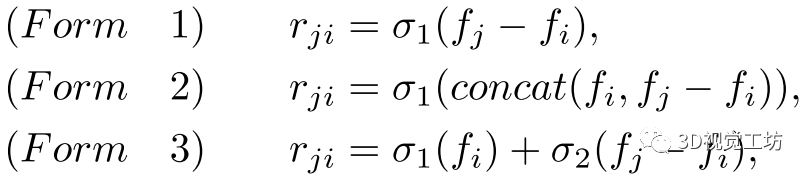
其中 表示中心點(diǎn)特征,
表示中心點(diǎn)特征,  是其相鄰特征之一。
是其相鄰特征之一。 是線性層。我們通過聚合關(guān)聯(lián)向量來更新中心的特征,即:
是線性層。我們通過聚合關(guān)聯(lián)向量來更新中心的特征,即:
表示中心點(diǎn)特征, 是其相鄰特征之一。是線性層。我們通過聚合關(guān)聯(lián)向量來更新中心的特征,即:
其中A是聚合函數(shù),例如最大池化。
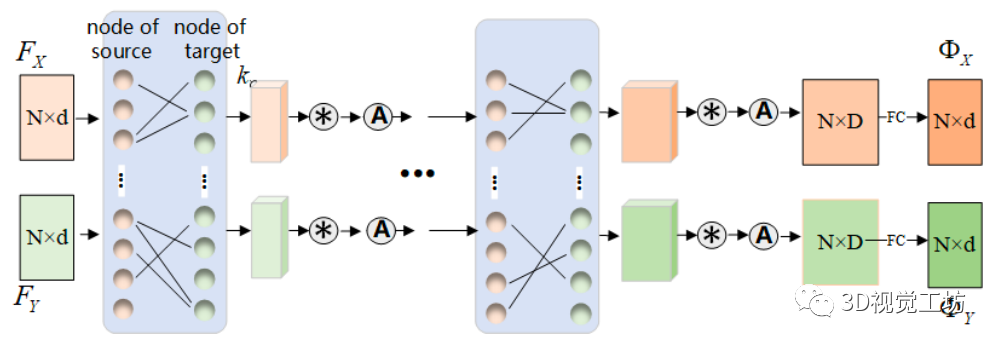
Fig4.局部特征交互單元的流程細(xì)節(jié)局部交互特征:更一般地,我們重復(fù)上述操作幾次,得到一個高級關(guān)聯(lián)表示 及其相應(yīng)的聚合輸出特征
及其相應(yīng)的聚合輸出特征 。請注意,局部圖將隨著節(jié)點(diǎn)特征更新而動態(tài)重新計(jì)算,如圖4所示。這是與在固定輸入圖上工作的CFE的重要區(qū)別。最后,我們在聚合輸出特征上應(yīng)用非線性層來得到調(diào)整后的特征
。請注意,局部圖將隨著節(jié)點(diǎn)特征更新而動態(tài)重新計(jì)算,如圖4所示。這是與在固定輸入圖上工作的CFE的重要區(qū)別。最后,我們在聚合輸出特征上應(yīng)用非線性層來得到調(diào)整后的特征 ,即局部交互特征。這個過程可以描述為:
,即局部交互特征。這個過程可以描述為:
及其相應(yīng)的聚合輸出特征。請注意,局部圖將隨著節(jié)點(diǎn)特征更新而動態(tài)重新計(jì)算,如圖4所示。這是與在固定輸入圖上工作的CFE的重要區(qū)別。最后,我們在聚合輸出特征上應(yīng)用非線性層來得到調(diào)整后的特征,即局部交互特征。這個過程可以描述為:

通過LIU,每個點(diǎn)的特征具有局部鄰域的特點(diǎn)。在LIU之后,源和目標(biāo)的特征更新為 和
和 ,然后后面緊接GIU。2.全局特征交互單元:為了共享全局信息并全面學(xué)習(xí)源和目標(biāo)之間的交互,我們設(shè)計(jì)了一個 GIU。所提出的GIU獲得源和目標(biāo)全局特征的交叉矩陣,然后通過將交叉矩陣投影到它們的潛在表示空間來更新點(diǎn)特征。全局信息聚合:我們首先聚合
,然后后面緊接GIU。2.全局特征交互單元:為了共享全局信息并全面學(xué)習(xí)源和目標(biāo)之間的交互,我們設(shè)計(jì)了一個 GIU。所提出的GIU獲得源和目標(biāo)全局特征的交叉矩陣,然后通過將交叉矩陣投影到它們的潛在表示空間來更新點(diǎn)特征。全局信息聚合:我們首先聚合 和
和 以獲得全局特征。此聚合操作串聯(lián)池化后的特征,然后使用共享的 MLP對其進(jìn)行進(jìn)一步調(diào)整,其過程可以表示如下:
以獲得全局特征。此聚合操作串聯(lián)池化后的特征,然后使用共享的 MLP對其進(jìn)行進(jìn)一步調(diào)整,其過程可以表示如下:
和,然后后面緊接GIU。2.全局特征交互單元:為了共享全局信息并全面學(xué)習(xí)源和目標(biāo)之間的交互,我們設(shè)計(jì)了一個 GIU。所提出的GIU獲得源和目標(biāo)全局特征的交叉矩陣,然后通過將交叉矩陣投影到它們的潛在表示空間來更新點(diǎn)特征。全局信息聚合:我們首先聚合和以獲得全局特征。此聚合操作串聯(lián)池化后的特征,然后使用共享的 MLP對其進(jìn)行進(jìn)一步調(diào)整,其過程可以表示如下:

其中 是共享的MLP操作。全局信息交叉:對于源點(diǎn)云全局特征
是共享的MLP操作。全局信息交叉:對于源點(diǎn)云全局特征
是共享的MLP操作。全局信息交叉:對于源點(diǎn)云全局特征
和目標(biāo)點(diǎn)云全局特征

,我們構(gòu)建 成對交互:
成對交互:
成對交互:
其中 是交叉特征矩陣,d是特征的維數(shù)。通過交叉操作,每個可能的特征交互在交叉特征矩陣中明確建模。全局交互特征:為了將交叉矩陣中包含的信息投影到每個點(diǎn)特征中,我們將源點(diǎn)云特征乘以交叉矩陣,同時目標(biāo)點(diǎn)云特征乘以轉(zhuǎn)置交叉矩陣
是交叉特征矩陣,d是特征的維數(shù)。通過交叉操作,每個可能的特征交互在交叉特征矩陣中明確建模。全局交互特征:為了將交叉矩陣中包含的信息投影到每個點(diǎn)特征中,我們將源點(diǎn)云特征乘以交叉矩陣,同時目標(biāo)點(diǎn)云特征乘以轉(zhuǎn)置交叉矩陣 。這個過程由下式表示,最終得到了源點(diǎn)云全局交互特征
。這個過程由下式表示,最終得到了源點(diǎn)云全局交互特征 和目標(biāo)點(diǎn)云全局交互特征
和目標(biāo)點(diǎn)云全局交互特征  。
。
是交叉特征矩陣,d是特征的維數(shù)。通過交叉操作,每個可能的特征交互在交叉特征矩陣中明確建模。全局交互特征:為了將交叉矩陣中包含的信息投影到每個點(diǎn)特征中,我們將源點(diǎn)云特征乘以交叉矩陣,同時目標(biāo)點(diǎn)云特征乘以轉(zhuǎn)置交叉矩陣。這個過程由下式表示,最終得到了源點(diǎn)云全局交互特征和目標(biāo)點(diǎn)云全局交互特征 。
通過 GIU,源點(diǎn)云和目標(biāo)點(diǎn)云可以交互全局上下文信息。即源點(diǎn)云的特征不僅集成了源點(diǎn)云全局信息,還集成了目標(biāo)點(diǎn)云全局信息,反之亦然。GIU之后,特征被更新為 和
和 。三、關(guān)鍵點(diǎn)層給定最終的交互特征,我們通過一個簡單高效的關(guān)鍵點(diǎn)層來選擇源點(diǎn)云和目標(biāo)點(diǎn)云公共的興趣點(diǎn)。我們的關(guān)鍵點(diǎn)層可以表示如下:
。三、關(guān)鍵點(diǎn)層給定最終的交互特征,我們通過一個簡單高效的關(guān)鍵點(diǎn)層來選擇源點(diǎn)云和目標(biāo)點(diǎn)云公共的興趣點(diǎn)。我們的關(guān)鍵點(diǎn)層可以表示如下:
和。三、關(guān)鍵點(diǎn)層給定最終的交互特征,我們通過一個簡單高效的關(guān)鍵點(diǎn)層來選擇源點(diǎn)云和目標(biāo)點(diǎn)云公共的興趣點(diǎn)。我們的關(guān)鍵點(diǎn)層可以表示如下:

其中是共享的MLP, 輸出每個點(diǎn)的顯著性分?jǐn)?shù)。這里,
輸出每個點(diǎn)的顯著性分?jǐn)?shù)。這里, 提取給定輸入的K個最大元素的索引。
提取給定輸入的K個最大元素的索引。 是從原始點(diǎn)云中選擇的關(guān)鍵點(diǎn)集。
是從原始點(diǎn)云中選擇的關(guān)鍵點(diǎn)集。 和
和 表示相應(yīng)的關(guān)鍵點(diǎn)特征集。四、剛性變換計(jì)算給定點(diǎn)對的坐標(biāo)和特征,剛性變換計(jì)算模塊采用IDAM中的相似矩陣卷積 (SMC) 來回歸每個點(diǎn)對的相似性得分。不同之處在于IDAM將點(diǎn)對的特征串聯(lián)起來作為 SMC輸入的一部分,而我們的模型使用點(diǎn)對的特征差異。最后,SMC獲得的對應(yīng)關(guān)系被傳遞到SVD層以計(jì)算剛性變換。
表示相應(yīng)的關(guān)鍵點(diǎn)特征集。四、剛性變換計(jì)算給定點(diǎn)對的坐標(biāo)和特征,剛性變換計(jì)算模塊采用IDAM中的相似矩陣卷積 (SMC) 來回歸每個點(diǎn)對的相似性得分。不同之處在于IDAM將點(diǎn)對的特征串聯(lián)起來作為 SMC輸入的一部分,而我們的模型使用點(diǎn)對的特征差異。最后,SMC獲得的對應(yīng)關(guān)系被傳遞到SVD層以計(jì)算剛性變換。
輸出每個點(diǎn)的顯著性分?jǐn)?shù)。這里,提取給定輸入的K個最大元素的索引。是從原始點(diǎn)云中選擇的關(guān)鍵點(diǎn)集。和表示相應(yīng)的關(guān)鍵點(diǎn)特征集。四、剛性變換計(jì)算給定點(diǎn)對的坐標(biāo)和特征,剛性變換計(jì)算模塊采用IDAM中的相似矩陣卷積 (SMC) 來回歸每個點(diǎn)對的相似性得分。不同之處在于IDAM將點(diǎn)對的特征串聯(lián)起來作為 SMC輸入的一部分,而我們的模型使用點(diǎn)對的特征差異。最后,SMC獲得的對應(yīng)關(guān)系被傳遞到SVD層以計(jì)算剛性變換。
審核編輯 :李倩
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
-
編碼器
+關(guān)注
關(guān)注
45文章
3955瀏覽量
142715 -
建模
+關(guān)注
關(guān)注
1文章
321瀏覽量
63311 -
點(diǎn)云
+關(guān)注
關(guān)注
0文章
59瀏覽量
4079
原文標(biāo)題:點(diǎn)云配準(zhǔn)任務(wù)中的點(diǎn)特征與一般點(diǎn)特征的區(qū)別在哪里?
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點(diǎn)推薦
全面解說:發(fā)電機(jī)中性點(diǎn)接地電阻柜與變壓器中性點(diǎn)接地電阻柜的差異
發(fā)電機(jī)中性點(diǎn)接地電阻柜與變壓器中性點(diǎn)接地電阻柜的核心共性的是:均為中性點(diǎn)經(jīng)電阻接地的成套保護(hù)裝置,核心功能都是限制接地故障電流、抑制暫態(tài)過電壓二者的本質(zhì)區(qū)別在于:發(fā)電機(jī)中性

如何克服毫米波雷達(dá)點(diǎn)云稀疏問題?
細(xì)致描繪物體輪廓的致密點(diǎn)云,毫米波雷達(dá)輸出的數(shù)據(jù)就顯得比較“吝嗇”,通常每幀圖像只能提供幾十個離散的探測點(diǎn)。 這種點(diǎn)云稀疏化現(xiàn)象直接限制了毫

如何解決激光雷達(dá)點(diǎn)云中“鬼影”和“膨脹”問題?
[首發(fā)于智駕最前沿微信公眾號]之前在聊激光雷達(dá)點(diǎn)云“鬼影”和“膨脹”的文章中( 相關(guān)閱讀: 激光雷達(dá)點(diǎn)云中“鬼影”和“膨脹”是什么原因?qū)е碌模浚芏嘈』锇槎继岬?/div>
![的頭像]() 發(fā)表于 01-02 09:30
?385次閱讀
發(fā)表于 01-02 09:30
?385次閱讀

激光雷達(dá)點(diǎn)云為什么會出現(xiàn)吸點(diǎn)現(xiàn)象?
相信各位在開車時一定遇到過這么一個場景,有一個很小的障礙物在車前,當(dāng)障礙物非常靠近車輛時,你在駕駛位置上是完全看不到的,這就是俗稱的“盲區(qū)”。對于激光雷達(dá)來說,也會出現(xiàn)類似的問題,當(dāng)障礙物離激光雷達(dá)足夠近時,它也會出現(xiàn)“盲區(qū)”,
自動駕駛模型是如何“看”懂點(diǎn)云信息的?
[首發(fā)于智駕最前沿微信公眾號]在自動駕駛中,點(diǎn)云是一個非常重要的感知信號,如激光雷達(dá)(LiDAR)生成的點(diǎn)

如何通過地址生成器實(shí)現(xiàn)神經(jīng)網(wǎng)絡(luò)特征圖的padding?
,從而使卷積輸出特征圖結(jié)果滿足我們的需求,這種補(bǔ)零的操作稱之為padding,如下圖所示。
關(guān)于padding的實(shí)現(xiàn),一般有兩種操作,第一種是使用稀疏地址生成器,尋找padding數(shù)據(jù)地址的規(guī)律,當(dāng)
發(fā)表于 10-22 08:15
AI 驅(qū)動三維逆向:點(diǎn)云降噪算法工具與機(jī)器學(xué)習(xí)建模能力的前沿應(yīng)用
在三維逆向工程領(lǐng)域,傳統(tǒng)方法在處理復(fù)雜數(shù)據(jù)和構(gòu)建高精度模型時面臨諸多挑戰(zhàn)。隨著人工智能(AI)技術(shù)的發(fā)展,點(diǎn)云降噪算法工具與機(jī)器學(xué)習(xí)建模能力的應(yīng)用,為三維逆向工程帶來了創(chuàng)新性解決方案,顯著提升

如何使用樹莓派+OpenCV實(shí)現(xiàn)姿態(tài)估計(jì)和面部特征點(diǎn)追蹤?
大家好,這是一個樹莓派和OpenCV的連載專題。使用樹莓派與OpenCV實(shí)現(xiàn)姿態(tài)估計(jì)和面部特征點(diǎn)追蹤使用樹莓派與OpenCV實(shí)現(xiàn)面部和運(yùn)動追蹤的云臺系統(tǒng)使用樹莓派和OpenCV實(shí)現(xiàn)手部

Mark點(diǎn)的防呆設(shè)計(jì)
什么是Mark點(diǎn)?Mark點(diǎn)是PCB加工和貼片過程中用于機(jī)器視覺定位的一種標(biāo)記點(diǎn)。它幫助貼片機(jī)、焊接機(jī)等設(shè)備準(zhǔn)確識別電路板的位置和方向,確保組裝精度。Mark

CANFD節(jié)點(diǎn)的采樣點(diǎn)如何測量?
本文導(dǎo)讀為提升CAN/CANFD網(wǎng)絡(luò)的通信可靠性,各節(jié)點(diǎn)需盡可能配置合適且一致的采樣點(diǎn)。然而在設(shè)備CAN通信采樣點(diǎn)參數(shù)未知的情況下,如何驗(yàn)證各節(jié)點(diǎn)采樣點(diǎn)設(shè)置的

發(fā)電機(jī)中性點(diǎn)接地和不接地的區(qū)別
發(fā)電機(jī)中性點(diǎn)接地與不接地的主要區(qū)別在于故障處理、絕緣要求和供電可靠性。中性點(diǎn)接地系統(tǒng)(直接或經(jīng)阻抗接地)故障電流大,保護(hù)裝置可快速切除故障,抑制過電壓,絕緣要求低,但會立即停電,適用于高壓系統(tǒng)。中性
自動駕駛中常提的“點(diǎn)云”是個啥?
[首發(fā)于智駕最前沿微信公眾號]在自動駕駛系統(tǒng)中,點(diǎn)云技術(shù)作為三維空間感知的核心手段,為車輛提供了精確的距離和形狀信息,從而實(shí)現(xiàn)目標(biāo)檢測、環(huán)境建模、定位與地圖構(gòu)建等關(guān)鍵功能。那所謂的“點(diǎn)

云服務(wù)器和獨(dú)立服務(wù)器的區(qū)別在哪?一文讀懂如何選擇
面對云服務(wù)器與獨(dú)立服務(wù)器的選擇,許多人常因概念模糊而糾結(jié)。云服務(wù)器和獨(dú)立服務(wù)器的區(qū)別在于資源分配方式、擴(kuò)展性及成本結(jié)構(gòu),選擇時需結(jié)合業(yè)務(wù)需求權(quán)衡利弊。本文將從兩者核心差異進(jìn)行對比,為大家提供參考依據(jù)。
一種基于點(diǎn)、線和消失點(diǎn)特征的單目SLAM系統(tǒng)設(shè)計(jì)
本文提出了一種穩(wěn)健的單目視覺SLAM系統(tǒng),該系統(tǒng)同時利用點(diǎn)、線和消失點(diǎn)特征來進(jìn)行精確的相機(jī)位姿估計(jì)和地圖構(gòu)建,有效解決了傳統(tǒng)基于點(diǎn)特征的SL

- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗(yàn)
- 設(shè)計(jì)大賽
- 電子發(fā)燒友
- 關(guān)于我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 張迎輝:mikezhang@elecfans.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察

版權(quán)所有 ? 長沙勒克斯教育咨詢有限公司
湖南省長沙市開福區(qū)月湖街道匍園路20號聚恒科技園1棟2301-1房
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023036445號-105-1
工商網(wǎng)監(jiān)
湘ICP備2023036445號-105-1
評論