 測試和分析機器人導航系統的成功
測試和分析機器人導航系統的成功

如果您正在設計機器人導航系統,例如用于自動真空吸塵器,那么重要的是它能夠準確地找到自己的方式。在確定正確的傳感器并將系統組裝在一起后,有必要進行測試以證明導航算法并確保一致的高性能。
但是,您如何進行此測試并衡量性能呢?
對于地面機器人,其定位算法必須準確跟蹤其位置,而其他算法則有助于其實現更大的功能。為導航而設計的算法和實現機器人目標的算法在沒有正確方向的情況下是沒有意義的。
對于需要覆蓋整個表面才能完成其工作的清潔機器人尤其如此。其映射越準確,完成工作的速度就越快,最終用戶就越滿意。同樣的原理也適用于任何地面機器人:例如,大型倉庫機器人的精確移動意味著客戶可以更快地獲得產品,從而提高效率。
由于輪式機器人傾向于直線移動,因此航向精度和航向漂移(航向誤差如何隨時間變化)是重要的指標。雖然航向是機器人前進方向的一個組成部分,但最重要的是它最終到達的地方。測量軌跡誤差,或者我們的機器人到達的距離,將有助于我們了解我們的系統到底有多準確。
測試環境
在這個例子中,我們選擇了航向誤差和軌跡誤差作為我們要研究的兩個最重要的標準。現在,我們需要一個參考點或事實,來與機器人的輸出進行比較。為了通過跟蹤機器人的運動來實現這一目標,基于紅外的攝像頭系統可以提供靈活性,準確性和精確性。基于紅外的相機系統與用于電影動作捕捉和全球機器人實驗室的技術相同。
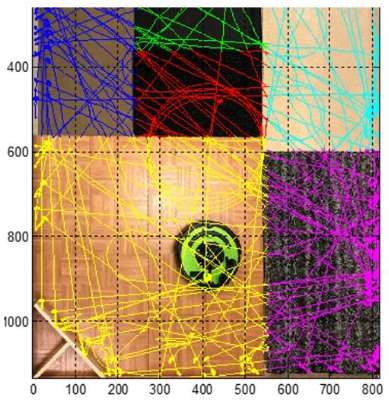
圖 1:機器人動作捕捉。
機器人應該在預期的部署環境等條件下進行測試 - 無論是模擬倉庫,模擬醫院還是模擬客廳。環境在許多方面各不相同,例如房間大小、物體所在的位置、地板、磁場和溫度的變化。確保您的測試環境能夠涵蓋這些類型的更改,可以構建更強大的解決方案。
例如,CEVA的機器人真空測試是在基于國際標準的模擬客廳中完成的。該標準非常具體,包含多件家具,地板的變化,傾斜度,顛簸,甚至對墻壁上內容的要求(與VSLAM機器人相關)。通過使用這組障礙物和設置,我們可以收集在使用過程中看到的相同場景的航向和軌跡數據。
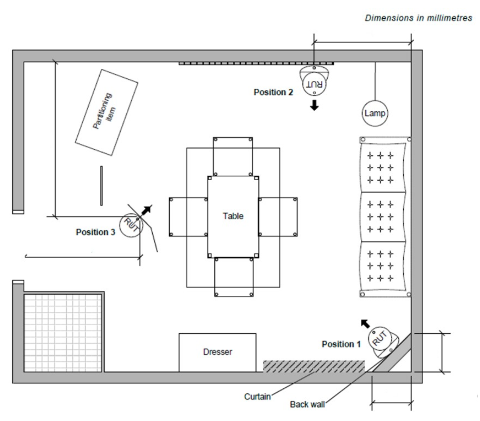
圖2:機器人真空測試室。
保持真實
我們的測試需要調查當我們以類似于現實世界的方式改變環境時會發生什么。例如,我們知道航向誤差是由于溫度變化引起的慣性傳感器不準確而引入的。然后,我們應該驗證機器人在其預期溫度范圍內的操作。
與我們組織良好的測試環境相比,我們知道現實世界是混亂的。我們的機器人經常會受到意外變化的影響:人或動物會撞到它,我們的測試設置中可能還有其他障礙物,或者地板材料可能是意想不到的。
測試需要反映這些方案才能可靠。迭代次數越多,我們的圖片就越完整,我們就越能更好地調整算法以提高系統性能。
例如,我們可以包括以下測試:
基線 – 在測試環境中的預期范圍內變化溫度
顛簸 – 添加突然的方向變化或位移以模擬偶然的顛簸
障礙 – 增加物體數量和中斷
使用壽命 – 增加測試運行時間,以模擬在工業環境中的使用
理想情況下,我們應該在多個測試平臺上多次運行這些測試,以收集盡可能多的數據。如果您正在測試整個機器人,這顯然更加昂貴和復雜。
CEVA專注于傳感器,測試騎在同一機器人上的多個傳感器,以獲取盡可能多的數據。這使我們能夠使用多個數據點跟蹤相對于事實的航向,并更深入地了解基礎和外部因素如何影響其性能。
分析此
如果沒有適當的分析,數據就什么都不是,通過精心的管理,我們可以優化機器人的跟蹤性能。例如,通過我們全面的測試計劃,我們可以查看機器人的感知航向偏離我們的運動捕捉系統測量的航向的速度有多快。
如果您只用幾個數字(例如每個試驗結束時的標題差)來匯總航向準確性,您可能會錯過有價值的見解,因為有時可能會有大錯誤,后來被其他大錯誤抵消,或者也許除了最后的短暫故障外,一個測試基本上是準確的。
因此,相反,我們檢查每個時刻的錯誤增長率(例如,在滾動的15秒窗口內),并將每個錯誤都視為單獨的數據點。然后,我們在 CDF(累積分布函數)中繪制每次試驗的這些誤差增長值的分布,如圖 3 所示。查看圖(此處越靠近左側的線條越好),我們可以輕松地將中位數性能與最壞情況或其他百分位數進行比較,并確定異常值。
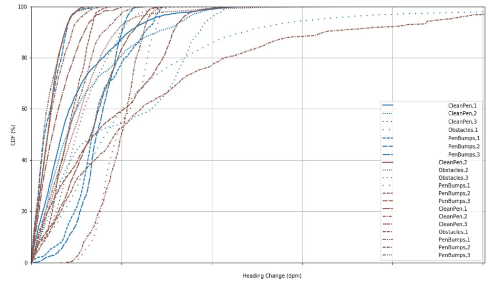
圖 3:不同條件下多種算法的 CDF。
這有助于我們確定哪些傳感器和算法的運行航向漂移比其他傳感器和算法少,并向我們展示如何調整這些值以獲得更高的精度。
我們可以在查看軌跡誤差的同時執行類似的分析。它可以通過多種方式進行測量:
絕對誤差獨立比較感知軌跡和實際軌跡的終點。這使我們能夠在長時間的試驗中看到航向和距離誤差的積累。
相對誤差將兩個數據集調整到每個測量窗口上的相同起點。這將先前誤差的累積與標題誤差引起的誤差增長隔離開來。
重新定向的相對誤差考慮了每個測量窗口開始時的平移和旋轉差異。這會將單位距離的整體誤差增長與先前累積的誤差隔離開來。這是識別軌跡誤差源的最有用指標,軌跡誤差在重新定向的相對誤差中顯示為“熱點”。
結論
設計和測試機器人導航系統似乎是一項艱巨的任務,但通過將其分解成其組成部分,它變得更加易于管理。使用正確的傳感器和正確的軟件來組合其數據,機器人可以在項目規格范圍內盡可能準確。
本文中描述的測試方法可用于確定機器人的準確性及其在典型真實條件下的行為。通過在合適的環境中進行測試,并適當地分析測試數據,我們可以確保完成的機器人無論遇到什么條件,都能按預期運行。
審核編輯:郭婷
-
傳感器
+關注
關注
2576文章
55062瀏覽量
791509 -
機器人
+關注
關注
213文章
31093瀏覽量
222358
發布評論請先 登錄
探索RISC-V在機器人領域的潛力
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
工業機器人的特點
組合導航系統中的慣性導航系統是什么?

組合導航系統中的慣性導航系統是什么?
輪式移動機器人電機驅動系統的研究與開發
明遠智睿SSD2351開發板:語音機器人領域的變革力量
能夠精準定位的樹莓派機器人!




 工商網監
工商網監
評論