") Sobel簡介及代碼實現(xiàn)
Sobel簡介及代碼實現(xiàn)

一.Sobel簡介
-
一句話可以概況為,分別求水平與豎直梯度,然后求平方和再開方(近似的話就直接求絕對值之和),最后與設(shè)定的閾值進(jìn)行比較,大于的話就賦值為0,小于的話就賦值為255。
-
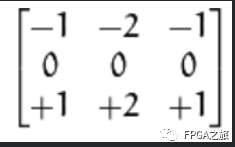
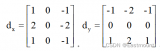
x方向梯度dx的求法:3*3的圖像矩陣與下面的矩陣在對應(yīng)位置相乘然后相加
-
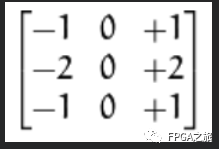
y方向梯度dy的求法:同上
二.代碼實現(xiàn)
:0] Sobel_px ,Sobel_nx;:0] Sobel_py ,Sobel_ny;:0] Sobel_x;:0] Sobel_y;:0] Sobel_data;//x方向的梯度assign Sobel_x = (Sobel_px > Sobel_nx) ? (Sobel_px - Sobel_nx) : (Sobel_nx - Sobel_px);//y方向的梯度assign Sobel_y = (Sobel_py > Sobel_ny) ? (Sobel_py - Sobel_ny) : (Sobel_ny - Sobel_py);=(Sobel_x+Sobel_y>'d135)?'d0:'d255;clk_9M or negedge rst)begin== 1'b0)beginSobel_px <= 'd0;Sobel_nx <= 'd0;endelse if(cur_x >= 'd100 && cur_x <= 'd199 && cur_y >= 'd50)beginSobel_nx <= data_line_11 + data_line_21 + data_line_21 + data_line_31;Sobel_px <= data_line_13 + data_line_23 + data_line_23 + data_line_33;endelsebeginSobel_nx <= 'd0;Sobel_px <= 'd0;endendclk_9M or negedge rst)begin== 1'b0)beginSobel_py <= 'd0;Sobel_ny <= 'd0;endelse if(cur_x >= 'd100 && cur_x <= 'd199 && cur_y >= 'd50)beginSobel_py <= data_line_11 + data_line_12 + data_line_12 + data_line_13;Sobel_ny <= data_line_31 + data_line_32 + data_line_32+ data_line_33;endelsebeginSobel_ny <= 'd0;Sobel_py <= 'd0;endend
審核編輯:湯梓紅
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
FPGA
+關(guān)注
關(guān)注
1660文章
22412瀏覽量
636404 -
sobel
+關(guān)注
關(guān)注
0文章
12瀏覽量
8210
原文標(biāo)題:FPGA實現(xiàn)Sobel邊緣檢測
文章出處:【微信號:zhuyandz,微信公眾號:FPGA之家】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
基于FPGA的Sobel邊緣檢測工作原理
Sobel 邊緣檢測的工作原理是檢測圖像在水平和垂直方向上的梯度變化。為此,將兩個卷積濾波器應(yīng)用于原始圖像,然后組合這些卷積濾波器的結(jié)果以確定梯度的大小。
發(fā)表于 12-14 11:34
?1966次閱讀
基于FPGA的Sobel邊緣檢測的實現(xiàn)
我們在此基礎(chǔ)上修改,從而實現(xiàn),基于FPGA的動態(tài)圖片的Sobel邊緣檢測、中值濾波、Canny算子邊緣檢測、腐蝕和膨脹等。那么這篇文章我們將來實現(xiàn)基于FPGA的Sobel邊緣檢測。圖像
發(fā)表于 08-29 15:41
基于FPGA的邊緣檢測和Sobel算法
轉(zhuǎn)帖摘要: 針對嵌入式軟件無法滿足數(shù)字圖像實時處理速度問題,提出用硬件加速器的思想,通過FPGA實現(xiàn)Sobel邊緣檢測算法。通過乒乓操作、并行處理數(shù)據(jù)和流水線設(shè)計,大大提高算法的處理速度。采用模塊
發(fā)表于 11-29 08:57
【正點原子FPGA連載】第七章OV5640攝像頭Sobel邊緣檢測-領(lǐng)航者ZYNQ之HLS 開發(fā)指南
邊緣檢測實驗,來學(xué)習(xí)如何使用Vivado HLS工具生成實現(xiàn)Sobel邊緣檢測算法的IP核,以及在Vivado中對綜合結(jié)果進(jìn)行驗證的流程。本章包括以下幾個部分:77.1Sobel邊緣檢測簡介
發(fā)表于 10-13 17:05
【米爾MYS-8MMX開發(fā)板免費(fèi)試用】-VI.Sobel邊緣檢測(ZMJ)
【米爾MYS-8MMX開發(fā)板】-VI.Sobel邊緣檢測(ZMJ)1.功能簡介本案例使用 GStreamer API 通過 ARM Cotrex-A53 從 USB 攝像頭獲取 MJPEG 格式視頻
發(fā)表于 09-10 15:41
時間戳的簡介與實現(xiàn)
時間戳?xí)r間戳簡介時間戳的實現(xiàn)時間戳的初始化時間戳簡介簡而言之,就是在代碼中插下標(biāo)注,在代碼運(yùn)行后通過算開始節(jié)點TimeStart和結(jié)束節(jié)點T
發(fā)表于 02-28 06:23
迅為iTOP-RK3568開發(fā)板Sobel 算子邊緣檢測
本小節(jié)代碼在配套資料“iTOP-3568 開發(fā)板\\\\03_【iTOP-RK3568 開發(fā)板】指南教程
\\\\04_OpenCV 開發(fā)配套資料\\\\32”目錄下,如下圖所示:
Sobel
發(fā)表于 09-18 10:27
基于CORDIC的高速Sobel算法實現(xiàn)
為提高圖像邊緣檢測的處理速度,提出一種基于CORDIC的高速Sobel算法實現(xiàn)。

FPGA圖像處理的Sobel邊緣檢測
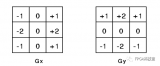
Sobel邊緣檢測 Sobel邊緣檢測原理教材網(wǎng)上一大堆,核心為卷積處理。 Sobel卷積因子為: 該算子包含兩組3x3的矩陣,分別為橫向及縱向,將之與圖像作平面卷積,即可分別得出橫向及縱向的亮度差

淺述Sobel算子在HLS上的實現(xiàn)教程
Sobel 原理介紹 索貝爾算子(Sobel operator)主要用作邊緣檢測,在技術(shù)上,它是一離散性差分算子,用來運(yùn)算圖像亮度函數(shù)的灰度之近似值。在圖像的任何一點使用此算子,將會產(chǎn)生對應(yīng)的灰度
Sobel算子原理介紹與實現(xiàn)方法
索貝爾算子(Sobel operator)主要用作邊緣檢測,在技術(shù)上,它是一離散性差分算子,用來運(yùn)算圖像亮度函數(shù)的灰度之近似值。在圖像的任何一點使用此算子,將會產(chǎn)生對應(yīng)的灰度矢量或是其法矢量Sobel 卷積因子為:
SpinalHDL里如何實現(xiàn)Sobel邊緣檢測
書接上文,趁著今天休假,采用SpinalHDL做一個小的demo,看看在SpinalHDL里如何優(yōu)雅的實現(xiàn)Sobel邊緣檢測。
圖像銳化的Sobel、Laplacian算子基礎(chǔ)知識介紹
Sobel 算子是一種用于邊緣檢測的離散微分算子,它結(jié)合了高斯平滑和微分求導(dǎo)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論