") 視域(FOV)和虛擬圖像距離
視域(FOV)和虛擬圖像距離

“車載抬頭顯示(HUD)未來(lái)的走向”這個(gè)話題乍一聽(tīng)來(lái)似乎會(huì)涉及很多技術(shù)詞匯,但這項(xiàng)顯示技術(shù)在未來(lái)的幾年中將有巨大的應(yīng)用潛力。據(jù)HIS Automotive預(yù)測(cè),全球范圍內(nèi),前裝HUD的汽車銷量將從2012年的120萬(wàn)輛增加至2020年的910萬(wàn)輛——這不包含消費(fèi)者對(duì)其已有車輛使用后裝HUD解決方案的數(shù)量。
如果你是開(kāi)發(fā)人員或是汽車原始設(shè)備制造商(OEM),那么你可能正為將HUD引入下一臺(tái)車輛——無(wú)論是集成式還是后裝解決方案——時(shí)有哪些注意事項(xiàng)而頗為費(fèi)心。開(kāi)發(fā)人員在構(gòu)造不同的產(chǎn)品時(shí)需要考慮很多因素,包括視域(FOV)和圖像質(zhì)量。
推動(dòng)車載HUD未來(lái)發(fā)展的一個(gè)關(guān)鍵領(lǐng)域就是增強(qiáng)現(xiàn)實(shí)(AR)。首先,我們想為這里所指的AR做出定義——雖然目前市場(chǎng)上對(duì)于AR可謂眾說(shuō)紛紜,但對(duì)于AR會(huì)如何影響汽車顯示的未來(lái)的看法則相對(duì)一致。
如果你將真實(shí)世界放在一端,同時(shí)將虛擬現(xiàn)實(shí)(VR)放在另一端,AR就正好位于這兩個(gè)極端的中間。在車輛中,AR在我們看到的真實(shí)世界上覆蓋數(shù)字圖像,從而為駕駛員的視線增強(qiáng)了計(jì)算智能性。
換句話說(shuō),AR HUD使得擋風(fēng)玻璃成為速度和路面危險(xiǎn)等所有相關(guān)數(shù)據(jù)的焦點(diǎn),同時(shí)保證駕駛員始終將注意力放在前方的路面上。雖然在關(guān)于顯示哪些相關(guān)數(shù)據(jù)以及何時(shí)顯示數(shù)據(jù)方面仍有爭(zhēng)議,但現(xiàn)在行業(yè)內(nèi)已經(jīng)有了一些在設(shè)計(jì)AR HUD時(shí)公認(rèn)的需要注意的技術(shù)要點(diǎn)。
視域(FOV)和虛擬圖像距離
視域也許對(duì)于任何一個(gè)HUD來(lái)說(shuō)都是最重要的一個(gè)方面,對(duì)于AR HUD來(lái)說(shuō)更是如此,這是因?yàn)樗苯佑绊戱{駛員看到的圖像尺寸。當(dāng)前,用DLP?技術(shù)實(shí)現(xiàn)的最寬FOV能夠讓OEM的向上投射角度達(dá)到12度——這個(gè)是之前業(yè)內(nèi)所能實(shí)現(xiàn)的數(shù)值的兩倍。
虛擬圖像距離控制一幅圖像的投射距離以及這幅圖像出現(xiàn)在距離駕駛員多遠(yuǎn)的地方。這一點(diǎn)在速度較高時(shí)尤其重要,因?yàn)檫@時(shí)需要更好地指示出路面危險(xiǎn)等情況。當(dāng)前使用DLP芯片的HUD設(shè)計(jì)可以將圖像投射在駕駛員面前2米至20米的任意范圍內(nèi)。
圖像質(zhì)量
需要注意的一點(diǎn)是,在這個(gè)情況下,圖像質(zhì)量并不一定等同于更高的分辨率。圖像質(zhì)量涉及圖像刷新率、色深、亮度等多個(gè)變量。與室內(nèi)影院不同,在如此混亂和有些難以預(yù)料的室外汽車環(huán)境中,去控制圖像質(zhì)量本身就具有很大的挑戰(zhàn)性。白天和夜晚不斷變化的光照強(qiáng)度意味著任何一款汽車AR HUD解決方案必須能夠保持色深和色彩的準(zhǔn)確性,以及一致的高對(duì)比度,以便在大范圍的駕駛條件下正常工作。
例如我們的DLP3000-Q1符合車規(guī)的芯片組,它包括DLP 0.3英寸WVGA數(shù)字微鏡器(DMD)和DLPC120數(shù)字控制器、特有400,000個(gè)快速開(kāi)關(guān)可編程微鏡,從而實(shí)現(xiàn)數(shù)毫秒內(nèi)的高刷新率和增強(qiáng)的圖像質(zhì)量。DLP技術(shù)可以在任意光源下使用,從而使得開(kāi)發(fā)人員可以靈活地采用傳統(tǒng)白熾燈,或鹵素光源,LED,甚至是激光。
開(kāi)發(fā)選項(xiàng)
大多數(shù)汽車AR HUD解決方案需要開(kāi)發(fā)人員在設(shè)計(jì)一款解決方案時(shí)通力協(xié)作,以滿足他們產(chǎn)品和客戶的需求。正如我們之前提到的那樣,HUD解決方案通常是一款集成式解決方案的一部分,而這種解決方案特有先進(jìn)駕駛員輔助系統(tǒng)(ADAS)和其它集中工作的組件,以提供更佳的駕駛體驗(yàn)。
在TI,我們?cè)谂c開(kāi)發(fā)人員和組成TI設(shè)計(jì)公司網(wǎng)絡(luò)的合作伙伴合作方面有悠久的歷史,幫助他們創(chuàng)造出能夠利用和開(kāi)發(fā)我們廣泛半導(dǎo)體器件解決方案產(chǎn)品庫(kù)的產(chǎn)品和服務(wù)。
審核編輯:何安
-
Ar
+關(guān)注
關(guān)注
25文章
5283瀏覽量
176317 -
HUD
+關(guān)注
關(guān)注
16文章
196瀏覽量
48571
發(fā)布評(píng)論請(qǐng)先 登錄
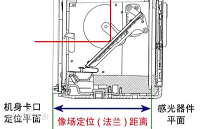
法蘭距離:相機(jī)鏡頭系統(tǒng)的關(guān)鍵參數(shù)
圖像采集卡:連接設(shè)備與數(shù)據(jù)的圖像樞紐

EspeedGrab圖像采集軟件介紹(Cameralink轉(zhuǎn)USB采集)
RK3588采集Cameralink圖像快速搭建系統(tǒng)辦法
工業(yè)鏡頭測(cè)量中的“工作距離”是什么?

AI眼鏡卷出新高度:夸克AI眼鏡首發(fā)Super Raw暗光增強(qiáng)算法+合像距調(diào)節(jié)

KVM虛擬化環(huán)境部署與性能優(yōu)化教程
網(wǎng)線傳輸距離和哪些因素有關(guān)

谷東智能助力AI+AR眼鏡邁向新高度
圖像采集卡選型詳細(xì)指南

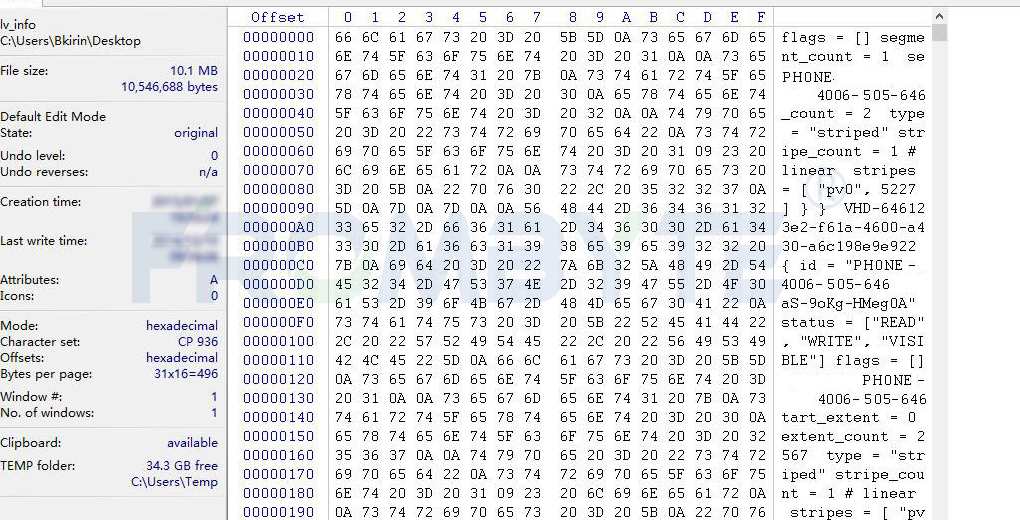
虛擬化數(shù)據(jù)恢復(fù)—XenServer虛擬化平臺(tái)上VPS不可用的數(shù)據(jù)恢復(fù)案例
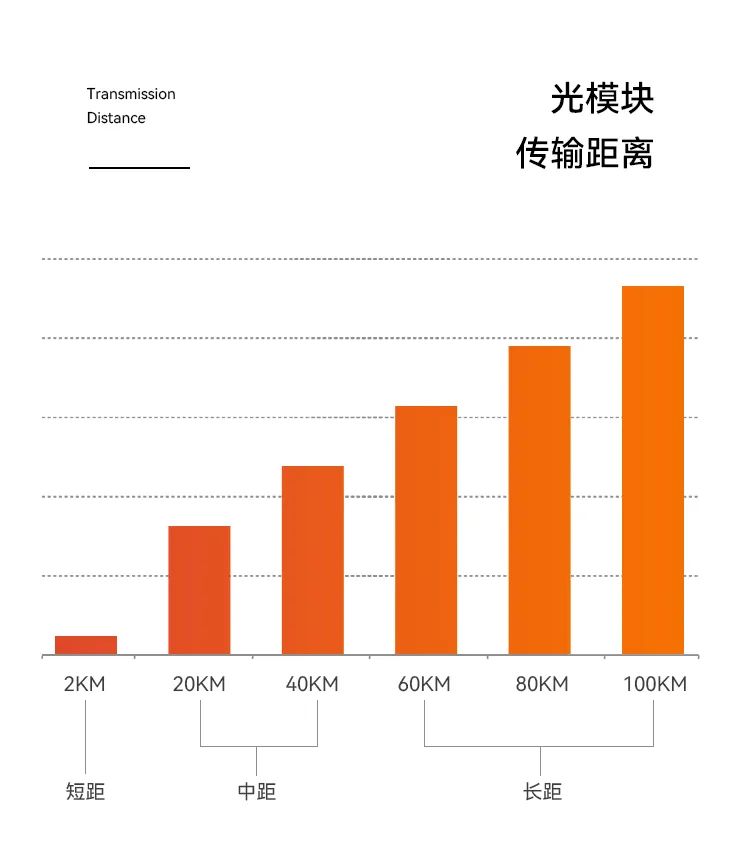
光模塊波長(zhǎng)與傳輸距離
如何增加藍(lán)牙通信距離?

使用VirtualLab Fusion中分布式計(jì)算的AR波導(dǎo)測(cè)試圖像模擬
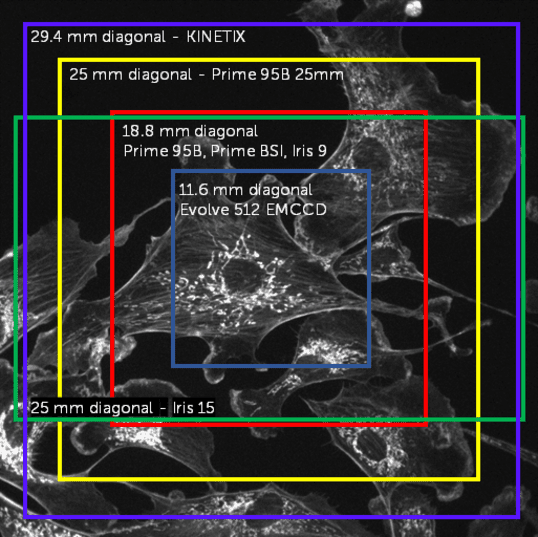
相機(jī)視野相關(guān)介紹



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論