 針對機器人奇異點的處理方法有哪些?
針對機器人奇異點的處理方法有哪些?

在調試機器人時,如果機器人處于下圖狀態(處于J4軸和J6軸同軸),會發生報警:MOTN-023或者MOTN-063,在此情況下,機器人只能在關節坐標系下移動。以下姿態即為奇異點位置。
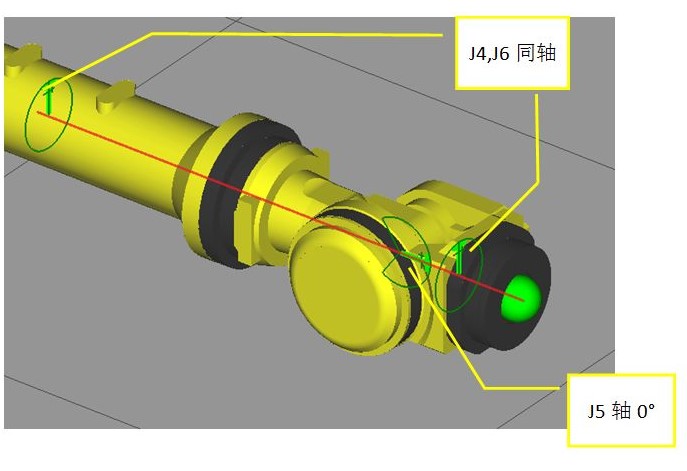
機器人奇異點位置
當機器人J5軸處于0°位置,機器人會出現MOTN-023報警:
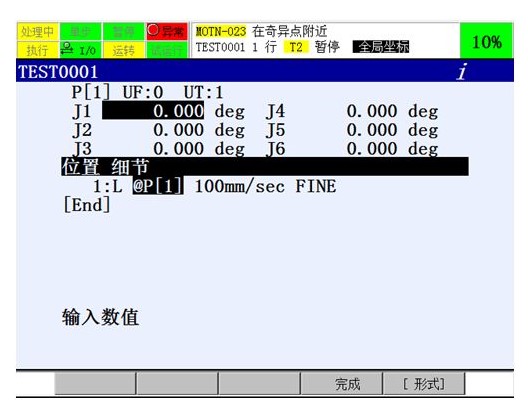
MOTN-023報警
當機器人在執行動作類型為L,C,A的動作指令時,如需經過奇異點,機器人會出現MOTN-063報警。
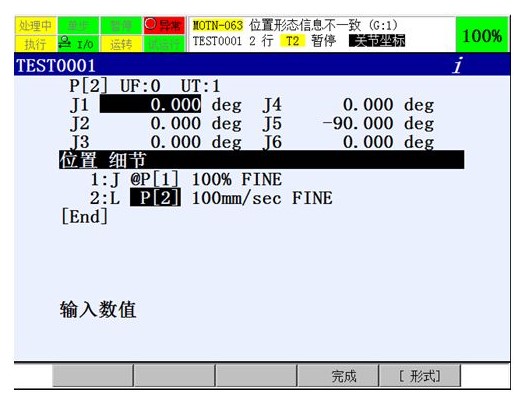
MOTN-063報警
針對奇異點的處理方法
情況一:在機器人示教時遇到奇異點
處理步驟:
a) 將機器人的示教坐標系切換到關節
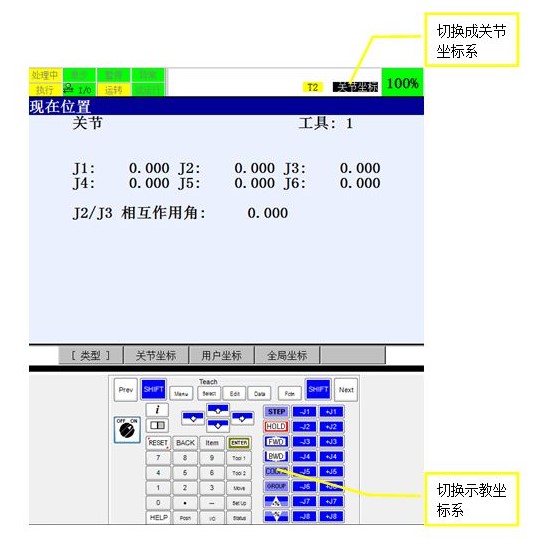
示教坐標系的切換
b) 點動機器人,讓J5軸調離0°的位置,建議小于-3°或者大于3°
c) 按RESET鍵復位報警
情況二:在程序運行時遇到奇異點
方法一:適合在無精細點位要求使用。
當運行程序時遇到奇異點,可以將該行動作指令的動作類型改為J,或者修改機器人的位置姿態,以避開路徑當中存在的奇異點。
方法二:適合在有精細點位要求使用。
在動作指令后添加附加動作指令:手腕關節動作指令WJNT(全名Wrist Joint)。
手腕關節動作指令(Wrist Joint),不在軌跡控制中對手腕的姿勢進行控制(標準設定下,程序運行時,手腕的姿勢始終被控制)。在直線動作、C圓弧動作、A圓弧動作時能夠使用該指令。
當遇到奇異點時,程序中使用該指令,手腕的姿勢在動作中發生變化,避開奇異點造成的手腕軸反轉動作,使得工具中心點繼續沿著軌跡動作。
處理步驟:
a) 將光標移至出現奇異點程序行行末,點擊F4選擇
b) 選擇Wrist Joint
c) 按RESET鍵復位報警
d) 運行程序,觀察運行軌跡。
責任編輯:lq6
-
機器人
+關注
關注
213文章
31092瀏覽量
222354 -
奇異點檢測
+關注
關注
0文章
2瀏覽量
5847
原文標題:干貨 | 發那科機器人中奇異點異常報警的處理辦法
文章出處:【微信號:AMTBBS,微信公眾號:世界先進制造技術論壇】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
探索RISC-V在機器人領域的潛力
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
自制巡線解迷宮機器人(上)
什么是機器人?追溯機器人技術的演變和未來




 工商網監
工商網監
評論