") 美國癱瘓患者用腦信號使用雙機械臂吃蛋糕
美國癱瘓患者用腦信號使用雙機械臂吃蛋糕

上個月,癱瘓 30 多年的羅伯特·布茲·克米勒維斯基(Robert Buz Chmielewski)向世界展示了如何通過大腦,控制兩支機械手臂拿起餐具給自己喂食的全過程。
在視頻中,Chmielewski 通過自己的大腦信號使用刀叉切割食物,隨后命令機械手臂將食物帶到嘴邊幾英寸處,進而吃掉。
Chmielewski 的成就標(biāo)志著,受疾病或傷害影響的患者將向恢復(fù)自控能力邁出了一大步,第一次,人類可以用雙側(cè)大腦植入物使截癱患者控制兩條機械手臂,并產(chǎn)生了兩手觸摸的感覺。
解碼腦信號 控制雙臂
Chmielewski 是一名 C6 脊髓損傷的患者,他的大腦健康,脖子以下神經(jīng)完好無損,但肩膀以下均為癱瘓狀態(tài),僅剩肩膀和手腕的一些殘余功能。2019 年 1 月,Chmielewski 作為約翰斯·霍普金斯大學(xué)一項腦機接口研究的參與者,通過一次長達 10 小時的手術(shù),將六個微電極陣列(MEA)植入大腦兩側(cè)。隨后,研究者一直試圖通過不斷的改善和訓(xùn)練,讓他獲得同時控制兩個假肢的能力。
據(jù)悉,這項由國防高級研究計劃局(DARPA)撥款,由約翰·霍普金斯大學(xué)的物理醫(yī)學(xué)與康復(fù)學(xué)系(PM&R)、應(yīng)用物理實驗室(APL)、神經(jīng)內(nèi)科與神經(jīng)外科共同合作的臨床研究,旨在研究可以幫助癱瘓和肢體殘缺患者獲得更加獨立生活能力的技術(shù)。
該團隊的主要方法是,將六個微電極陣列(MEA)分別植入到參與者的大腦兩個半球中,其中一半在運動皮層中,另一半在感覺皮層中。
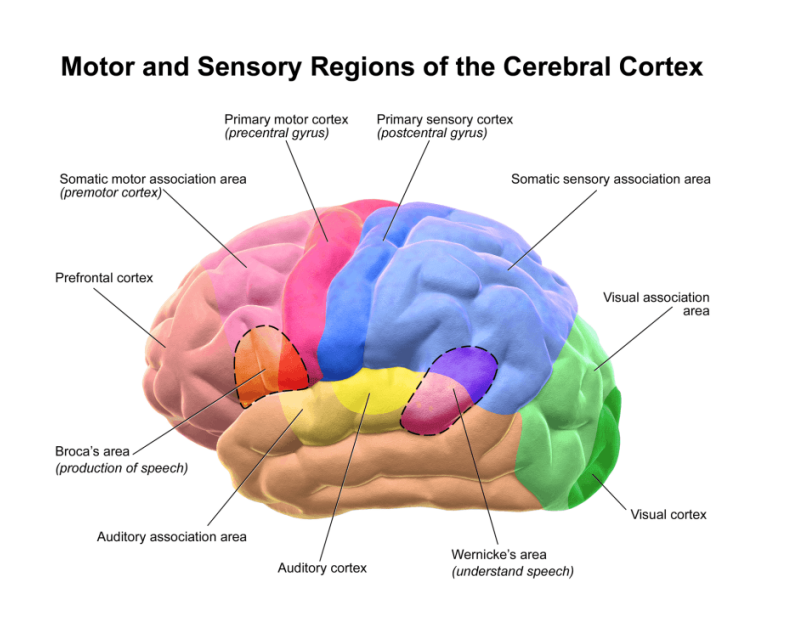
眾所周知,運動皮層是額葉的一個區(qū)域,位于中央溝前的后中央回的一大塊灰質(zhì),在解剖學(xué)上稱“中央前回”,亦稱“第Ⅰ軀體運動區(qū)”。它是大腦皮層中參與計劃、控制和執(zhí)行自主運動的區(qū)域,支配軀體各部分的運動,電刺激該部位會引起運動反應(yīng)。
感覺皮層則是負(fù)責(zé)接收和解讀來自身體不同部位的感覺信息。從不同的感受器(例如傷害感受器和熱感受器)接收的刺激被轉(zhuǎn)導(dǎo)為動作電位,該動作電位可以沿著一個或多個傳入神經(jīng)元傳遞到大腦的特定部位。
在該項目中,MEA 可以繞過受損的脊髓,讀取大腦產(chǎn)生的運動信號,并刺激感覺信號。此外,這些 MEA 還可以通過電線連接到機械臂(或其他效應(yīng)器,如光標(biāo)屏幕,虛擬效應(yīng)器等),從而允許來自大腦的神經(jīng)信號向其他設(shè)備發(fā)送消息,反之亦然。
在實驗中,研究小組植入的 MEA 允許計算機讀取來自參與者運動皮層的信號,這些信號傳達了運動意圖。緊接著,計算機解碼這些信號并將其發(fā)送到機械臂,從而使參與者可以像他真實的手臂一樣,控制其運動。
此外,研究小組通過多電極陣列讀取大腦信號的方法,有助于開發(fā)一種機器學(xué)習(xí)算法,該算法可解碼用戶的意圖,并將其轉(zhuǎn)變?yōu)樘囟ǖ纳窠?jīng)信號模式,最后通過計算機的轉(zhuǎn)換以指導(dǎo)手臂運動。隨著 Chmielewski 在腦機接口上進行更多的訓(xùn)練,該算法“學(xué)習(xí)”他的想法,然后移動手臂,最終會變得越來越熟練。
除了控制義肢,團隊還設(shè)想,MEA 還應(yīng)當(dāng)可以讓參與者使用神經(jīng)信號來控制計算機上的光標(biāo)或向智能家居設(shè)置、提供指令。
雙邊植入 模擬觸感
盡管控制癱瘓肢體對于癱瘓者來說是一項開創(chuàng)性的工作,但這只能解決一半的問題。如果沒有感覺的反饋,參與者控制的,實際上只是兩只麻木的手臂。沒有感官反饋,參與者很難使用正確的力量來拿起杯子,因此,觸感可以讓參與者無需看手臂就能知道手臂的位置。
和其它腦機接口不同的是,該團隊不僅構(gòu)建了一種可以讀取神經(jīng)信號并將其轉(zhuǎn)化為運動的解碼器,還最先在大腦兩個半球植入 MEA ,使參與者在獨立控制左右機械臂的同時,還能感知雙手的觸感。
該團隊將 MEA 植入到參與者的感覺皮層中的目的,就是模擬感覺,以便在觸摸假肢時,參與者將能夠感覺到觸碰,并精確定位其位置。
當(dāng)參與者想要移動手臂時,神經(jīng)信號從他的大腦傳播到計算機,再到假肢。當(dāng)假肢手指觸摸到某物時,微小的傳感器會將信息發(fā)送回他的大腦。對于參與者而言,即使信號反方向流動,他的感覺依舊像是他在用真正的手觸摸某物。
在一次采訪中,Chmielewski 表示:“他們(手臂)接觸的地方變化時,我會有不同的感覺。” “壓力變化的范圍,從像有人在握住你的手,到細(xì)砂紙摩擦手指。”
“我們的最終目標(biāo)是使諸如飲食之類的活動容易完成,讓機器人完成一部分工作,并讓參與者負(fù)責(zé)細(xì)節(jié):吃什么、在哪里切、切多大塊。”專門從事人機協(xié)作的 APL 高級機器人專家 Handelman 解釋道,“通過將腦機接口信號與機器人技術(shù)、人工智能相結(jié)合,我們可以使人類專注于其它更加的重要事情中去。”
APL 神經(jīng)科學(xué)家 Tenore 則表示,下一步,這項工作將不僅要增加參與者可以通過人機協(xié)作展示的日常生活活動的數(shù)量和類型,“此外,在執(zhí)行這些任務(wù)時為他提供更多的感官反饋,這樣他就不必完全依靠視覺來知道他是否成功”。
原文標(biāo)題:美國癱瘓患者用“大腦意念”使用雙機械臂吃蛋糕
文章出處:【微信公眾號:DeepTech深科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
責(zé)任編輯:haq
-
信號
+關(guān)注
關(guān)注
12文章
2914瀏覽量
80167
原文標(biāo)題:美國癱瘓患者用“大腦意念”使用雙機械臂吃蛋糕
文章出處:【微信號:deeptechchina,微信公眾號:deeptechchina】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
射頻RFID+機械臂:工業(yè)零部件加工后智能分揀
為什么高端機械臂都開始用它?詳解凌科DL28連接器5大“硬核實力”

告別圍欄時代!激光雷達讓機械臂產(chǎn)線“智能守衛(wèi)”效率飆升

復(fù)合機器人對比傳統(tǒng)AGV和機械臂的優(yōu)勢何在?

當(dāng)機械臂學(xué)會“雙語對話”:Modbus轉(zhuǎn)Profinet如何破解工業(yè)互聯(lián)的困局

3C 電子 / 汽車 / 物流與新零售:協(xié)作機械臂的三大行業(yè)落地范式

傳統(tǒng)測試設(shè)備的局限與協(xié)作機械臂的破局

機器人機械臂效率提升的革命性解決方案:上海永銘電容器實踐

EtherCAT轉(zhuǎn)Profinet協(xié)議轉(zhuǎn)換網(wǎng)關(guān)實現(xiàn)PLC與機械臂通訊的配置案例

創(chuàng)想智控焊縫跟蹤+發(fā)那科機器人實現(xiàn)工程機械臂架焊接智能化升級
協(xié)作機械臂產(chǎn)品介紹
PROFINET轉(zhuǎn)MODBUS TCP網(wǎng)關(guān)在機械臂通信操作中的應(yīng)用研究
GZCOM-NET:為機械臂測試帶來高效無線解決方案!




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論