") 機(jī)器人是如何完成避障實(shí)現(xiàn)智能行走的?
機(jī)器人是如何完成避障實(shí)現(xiàn)智能行走的?

避障是指機(jī)器人在行走過程中,通過傳感器感知到其路線規(guī)劃上存在的動態(tài)或靜態(tài)障礙物,按照一定的算法實(shí)時(shí)更新路徑,避開障礙物,最終到達(dá)目的地。
迅速熟知周圍環(huán)境,了解自身定位信息是機(jī)器人開展工作的第一步,而目前思嵐科技激光雷達(dá)傳感器能幫助機(jī)器人實(shí)時(shí)獲取所在環(huán)境的高精度輪廓信息,實(shí)現(xiàn)機(jī)器人的自主定位、建圖及避障等功能。
當(dāng)然,僅靠激光雷達(dá)傳感器是無法達(dá)到我們理想中的效果,為此,思嵐科技推出了充當(dāng)機(jī)器人“小腦”的自主定位導(dǎo)航模塊SLAMWARE,一個(gè)控制機(jī)器人運(yùn)動的核心中樞。
對機(jī)器人來說,小腦可以繪制環(huán)境地圖來指導(dǎo)自身行動,而如何在環(huán)境中找到一條從起點(diǎn)到終點(diǎn),同時(shí)避開障礙物的最優(yōu)路徑顯得更為困難。
思嵐科技模塊化自主定位導(dǎo)航SLAMWARE內(nèi)置基于激光雷達(dá)的同步定位與建圖 (SLAM) 及配套的路徑規(guī)劃功能。同時(shí),它也是思嵐科技推出的服務(wù)機(jī)器人自主行走的全套解決方案之一。
相較于開源ROS機(jī)器人操作系統(tǒng),SLAMWARE內(nèi)置的SLAM算法構(gòu)建出的地圖更加精確,即使受到外界干擾也可以保持較高的定位精度。在實(shí)際應(yīng)用時(shí),除了利用SLAM構(gòu)建環(huán)境地圖與實(shí)時(shí)定位外,我們還希望機(jī)器人在未知環(huán)境中自動避開障礙物,實(shí)現(xiàn)自主移動。SLAMWARE采用D*算法(即動態(tài)啟發(fā)式路徑搜索算法),可以讓機(jī)器人不需要預(yù)先錄入地圖,就可以在陌生環(huán)境中行動自如,躲避動態(tài)障礙物。
通常來說,服務(wù)機(jī)器人的工作環(huán)境都比較復(fù)雜,除了“眼睛”(激光雷達(dá))與“小腦”的組合之外,還需要多傳感器融合。
同時(shí),SLAMWARE還支持多傳感器融合,包括超聲波傳感器,防跌落傳感器、碰撞傳感器和深度攝像頭等,利用多種傳感器信息融合,幫助機(jī)器人實(shí)現(xiàn)更智能的運(yùn)動。
審核編輯 黃昊宇
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31097瀏覽量
222361 -
機(jī)器人避障
+關(guān)注
關(guān)注
0文章
11瀏覽量
7394
發(fā)布評論請先 登錄
智能機(jī)器人線圈在核心驅(qū)動系統(tǒng)中的關(guān)鍵作用
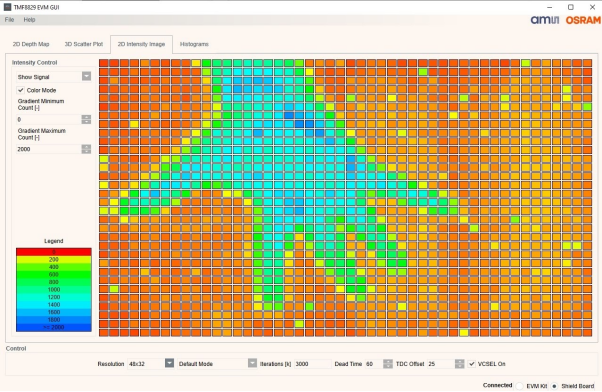
賦能機(jī)器人“慧眼”:TMF8829 48x32 多區(qū) dToF 傳感器,定義避障新高度
RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
當(dāng)復(fù)合機(jī)器人碰到障礙物,會觸發(fā)怎樣的智能繞障機(jī)制?
盤點(diǎn)割草機(jī)器人六大避障傳感器
工業(yè)機(jī)器人的特點(diǎn)
避障也能預(yù)判?視覺黑科技讓掃地機(jī)器人開啟“先知”模式
智能割草機(jī)器人行走輪無感FOC解決方案

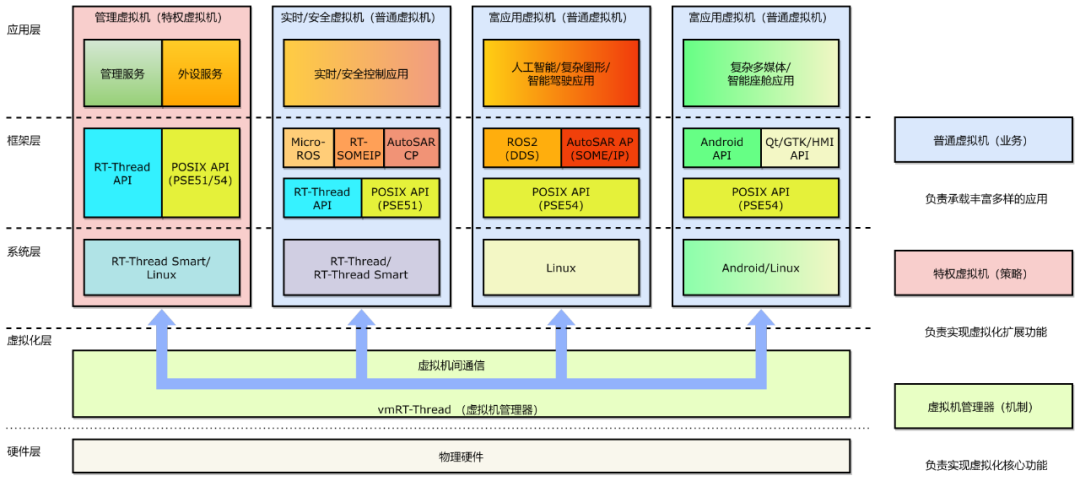
通過vmRT-Thread和ROS2賦能機(jī)器人智能開發(fā)
STM32+Android實(shí)現(xiàn)的智能家政機(jī)器人電路代碼論文及項(xiàng)目源碼
AGV機(jī)器人如何實(shí)現(xiàn)毫秒級避障?深度解析多傳感器融合的核心技術(shù)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論