 北大博士設計的無人駕駛船問世
北大博士設計的無人駕駛船問世

除了還未完全成熟的自動駕駛技術,解決交通擁堵問題還有另外一種思路:立體化的出行方式。比如紅極一時的 Uber 飛行汽車,以及,馬斯克在地下挖洞搞得風生水起的 Boring 公司 ——“用時速 240 公里的隧道客艙,送你到機場,只要 1 美元!”
你確定是汽車不是飛機嗎? 所以天上地下都有了,是不是就差水上?荷蘭的阿姆斯特丹運河使得該市被稱為 “北方的威尼斯”,乘游船觀光也是體驗這座城市的最佳途徑之一。 如果河上行駛的是無人船,你還敢上船嗎?
這就是麻省理工學院 (MIT) 計算機科學和人工智能實驗室 (CSAIL) 日前公布一個新項目,一艘能夠運送乘客的自動駕駛船。 研究人員還給這款船起了個有趣的諧音梗名字 ——Roboat II。 Roboat 是一個為期 5 年的研究項目,研究人員的初衷是希望通過這些自主駕駛船來改造阿姆斯特丹的運河,比如可以用它來收集水上垃圾、運送貨物或人員。
去年,CSAIL 研發了第一代自動駕駛船,這些船可以根據用途的不同自動組裝成用于各種浮動結構。今年,CSAIL 推出了第 2 代自動駕駛船 ——Roboat II,這是一艘可以搭載乘客的船只。“Roboat II” 比原版更大、更智能,能夠支持更多的重量。 這艘船只有 2 米長,可以搭載兩名乘客通過阿姆斯特丹的運河。MIT 稱之為 “疫情友好型”,因為乘客可以保持安全的社交距離。 這艘船共有四個推進器,可以向任何方向進行移動,還裝備了激光雷達、GPS 和慣性傳感器來幫助它導航。雖然單體船只很小,但是它依然是模塊化設計,這就意味著 Roboat II 可以由一艘領航船為主組裝成體積更大的船只。
MIT 將最初的 Roboat 規格定為普通船只的四分之一大小,而 Roboat II 發展到一半大小,這表明它正在慢慢發展到可以搭載 4-6 名乘客的全尺寸,據稱,這個更大的版本已經在阿姆斯特丹建造中,但是尚不得知其測試時間。 在阿姆斯特丹運河中,Roboat II 自主導航了 3 個小時,收集數據返回了起始位置,誤差 0.17 米。
未來,MIT 的研究小組希望繼續改進 Roboat 的算法,使其能夠更好地應對船只可能遇到的挑戰,比如水流和海浪的干擾。研究小組也在努力使它更有能力識別和 “理解” 它遇到的物體,這樣 Roboat 就能更好地處理與周邊環境的關系。 MIT 研究人員解釋開發這種船的幾個原因。首先,這個項目背后的團隊肩負著為荷蘭阿姆斯特丹市打造 “世界上第一支” 自主船隊的任務,所以 Roboat II 的開發是這個義務的一部分。同時,Roboat II 也可以在全球其他城市發揮巨大的作用,只要它們有運河或水道。
像這樣的小型自主船只可以舀起垃圾,運送包裹,甚至作為自動駕駛的水上出租車,將人們從一個地方運送到另一個地方。 MIT 教授 Daniela Rus 表示,我們正在開發可以運送人員和貨物的 Roboat 船隊,并與其他 Roboat 連接,形成一系列自主平臺,編組成浮式平臺,例如浮橋、舞臺、更大型的運輸平臺等等,以幫助緩解城市繁忙街道的擁堵狀況。
無人船可以自發搭建起一座浮橋,又不會給航運帶來太大影響,這在未來將是智慧城市的一部分 北大畢業博士為論文第一作者
目前,有關 Roboat II 的這篇研究已經在國際智能機器人與系統會議上展示,值得一提的是,這篇 最新論文的一作王偉是來自北大的一名博士畢業生。博士論文主要研究自主智能仿生機器人魚。 2016 年畢業后,王偉進入 MIT 進行博士后研究。現在,王偉是 MIT Senseable City 實驗室和 CSAIL 的高級博士后,也是 MIT 城市研究及規劃學系的研究人員。
船體之間無需通信,自主規劃路徑并且免碰撞
Roboat II 看上去像是幾個相連的矩形塊打造的 “拼圖”。長方形的船體包裹著傳感器、推進器、微控制器、攝像機和其他硬件。船體之間無需通信,跟隨者可預估領隊意圖并調整自己移動軌跡。 通過運行 SLAM 算法,利用激光雷達和 GPS 傳感器,以及用于定位、姿態和速度的慣性測量單元,船只可以進行自我定位。控制器跟蹤來自規劃器的參考軌跡,規劃器更新其路徑以避開檢測到的障礙。
在自動駕駛領域,早起的想法是將一輛人類駕駛的領頭車放在一串機器人車的前面。這就是所謂的列隊行駛(platooning),看起來就像一只母鵝帶領著一群小鵝。 這種 “跟隨領頭羊” 的游戲也可以應用到水上交通,傳統的列隊行駛,為了獲得準確的感知,需要在系統種每一個節點上都設置傳感器。 而船只可以很容易接觸和串聯移動,所以可以有比車隊串聯更復雜的安排。有了這種領頭 - 追隨的體系,就不必了每一個船上都設置傳感器了。
通常每個 Roboat 上運行的分布式控制器需要連接結構的速度信息 (以結構中心的速度表示),但 Roboat II 知道自己相對于結構中心的位置。也就是說,Roboat II 的算法不需要相對位置,每個 Roboat II 使用自己的速度,而不是結構中心的速度。 當領隊 Roboat II 開始向給定的目的地移動時,另一個 Roboat II 可以估計領隊的意圖并調整自己的移動軌跡。領隊船還可以通過調整輸入來引導 Roboat II 的其余部分,而不需要兩艘船之間進行任何通信。 研究人員計劃在未來使用人工智能來估計 Roboat 的關鍵參數。他們還打算探索自適應控制器,當物體被放置在船上時,允許結構的動態變化,船可以以各種方式 “變形” 成有用的結構,就像一個在河面或者湖泊上的組合積木, 自動充電也是可能的。船只可以自己插上電源,就像有自動充電功能的掃地機器人一樣。
阿姆斯特丹高級都市解決方案研究所正在建造一個 4 米的全尺寸模型,用于在阿姆斯特丹的運河中進行測試。 完全自動化是最終的目標,該團隊對 Roboat 的未來想象是,白天路面上的基礎設施運輸服務,到了半夜,可以在水路上繼續運作,比如物流、垃圾管理、廢物管理等等。一個很有趣的例子 —— 荷蘭每年有 1.2 萬輛自行車 “死于” 河道中,Roboat 就可以在這方面發揮作用。 王偉表示,還希望最終將該技術應用在其他船上實施,讓船只普遍具有自主性。
MIT 團隊的無人駕駛船只研究已有 5 年歷史。 2016 年,該項目的第一款作品 Roboat 問世,根據預寫的路線,它已經可以在阿姆斯特丹的運河道里行駛。當時其原型也在運河上進行了簡單的測試。 到 2018 年 5 月,研究人員設計了更低成本的 3D 打印機器船,大小僅為之前版本的 1/4,這些船只相比前代更為高效靈活,還配備了先進的軌跡跟蹤算法。 2019 年 6 月,團隊再次研發了一種 “自動鎖定機制”,船只會瞄準目標、相互緊扣,一旦失敗還會繼續嘗試。 2020 年,則是前文介紹的 Roboat 再次更新。
總的來說 MIT 的這個方案大大拓寬了未來無人船的商用化應用領域,AI 的目的就是讓人的生活更加省時省力。除了文中所描述的一些城市應用場景外,在港口轉運時,采用這種可編組無人平臺,可以搭建臨時碼頭,提高碼頭的空間利用率,甚至通過合理的程序優化,可以提升裝卸效率,現在有很多水路因為橋梁高度限制通航條件,或者在登陸戰的時候,我們可以采用這種智能化平臺扮演臨時碼頭的角色,協助轉運等等。 總之相關應用方向有很多值得發掘,人類只有不斷嘗試,才能知道未來是什么樣子的。
原文標題:北大博士設計的無人駕駛船問世!MIT歷時五年打造完工,可載人且自主規劃路徑和避障
文章出處:【微信公眾號:DeepTech深科技】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
人工智能
+關注
關注
1817文章
50105瀏覽量
265552 -
自動駕駛
+關注
關注
794文章
14890瀏覽量
180027
原文標題:北大博士設計的無人駕駛船問世!MIT歷時五年打造完工,可載人且自主規劃路徑和避障
文章出處:【微信號:deeptechchina,微信公眾號:deeptechchina】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
格陸博科技榮獲2025低速無人駕駛行業TOP20核心供應鏈獎
佑駕創新助力低速無人駕駛行業高質量發展
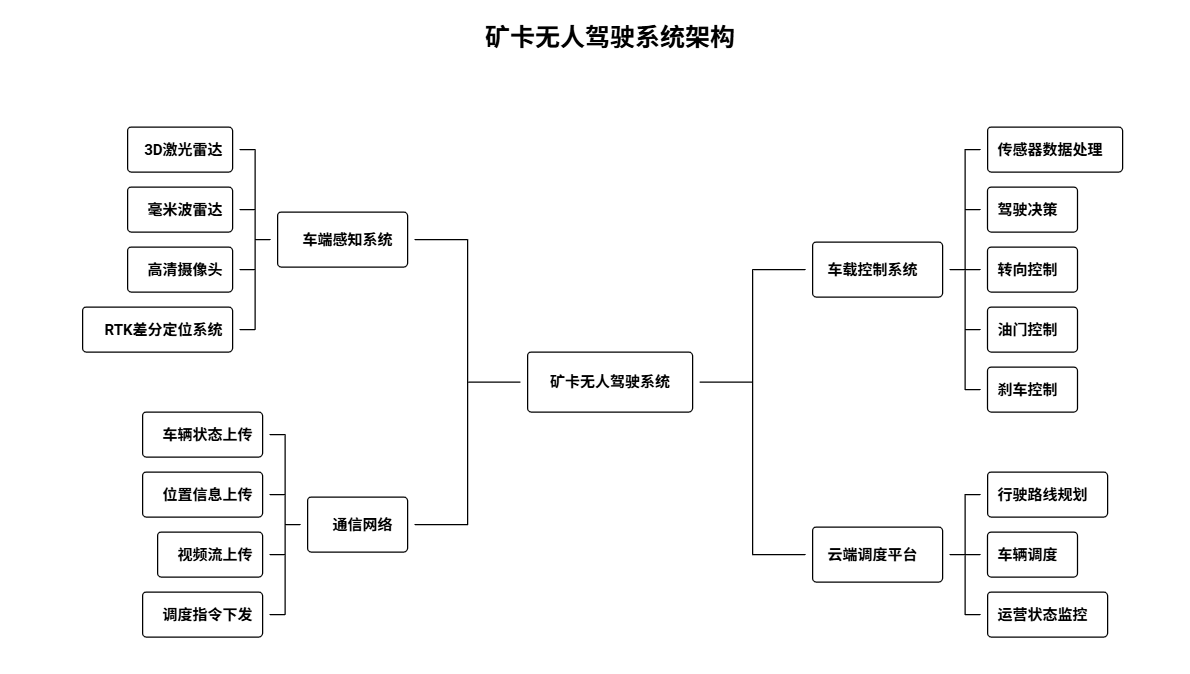
礦卡無人駕駛從理論到落地的全過程記錄(轉載)
小馬智行無人駕駛車參與第十五屆全運會火炬傳遞
2025無人駕駛技術細節及發展趨勢|(星創易聯細節解析)
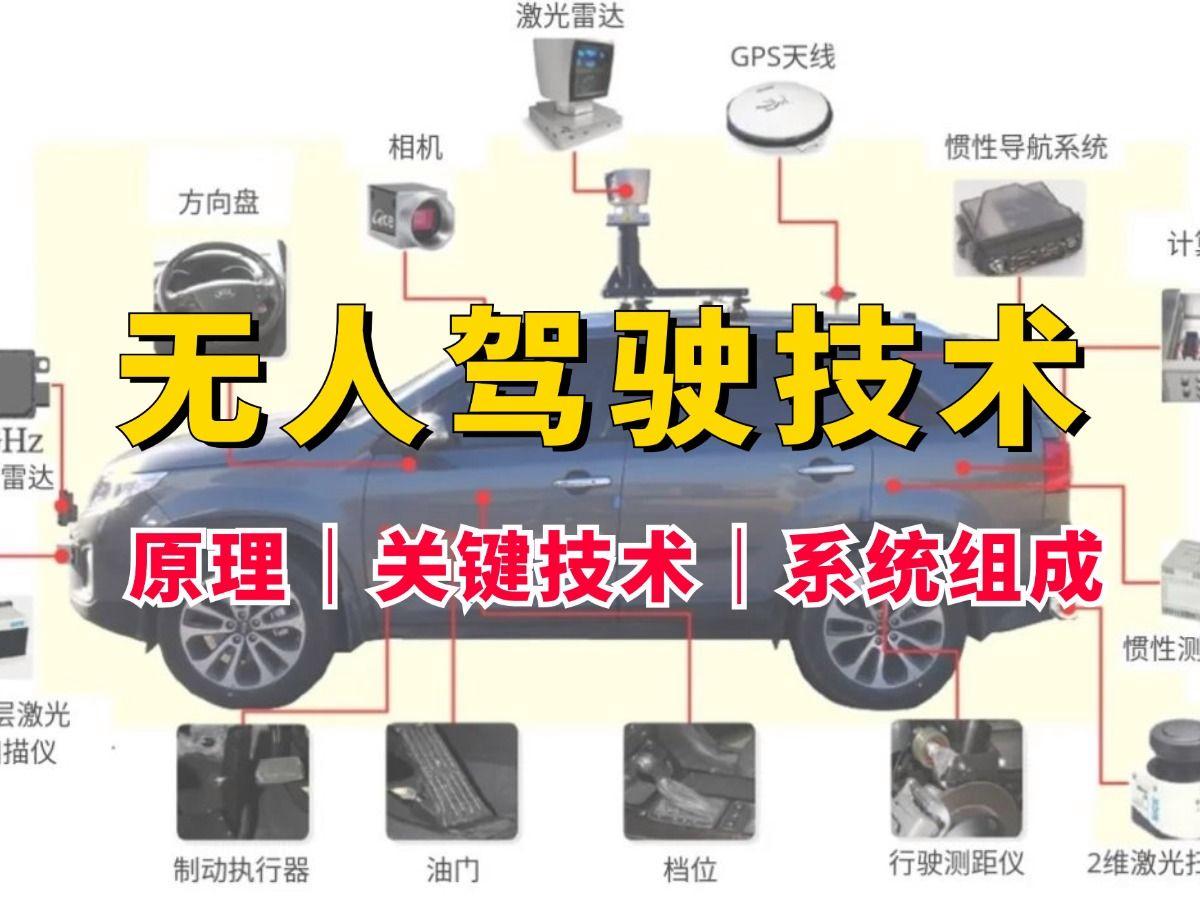
無人駕駛:智能決策與精準執行的融合
臂螺旋天線:為無人駕駛機器打造高精度導航新體驗
主線科技無人駕駛集卡助力中越智慧口岸建設
智行者科技無人駕駛小巴落地海南

無人駕駛技術未來在哪里?低速才是突破口

內蒙古首個超百臺增程式無人駕駛礦卡項目落地
易控智駕無人駕駛技術再次取得新突破
無人駕駛解決方案包含哪些方面?感知、決策與控制



 工商網監
工商網監
評論