 基于二維MEMS掃描振鏡的激光雷達設計了發射光學系統和接收光學系統
基于二維MEMS掃描振鏡的激光雷達設計了發射光學系統和接收光學系統

摘要:近年來人們對具有安全駕駛、智能控制功能的汽車需求增長,使智能駕駛汽車快速發展起來,激光雷達作為智能駕駛的核心傳感器之一得到廣泛的關注,其中MEMS激光雷達具有高幀率、高分辨率、體積小、成本低的優點,是國內外車載激光雷達的主要發展趨勢之一。光學系統是MEMS激光雷達重要組成部分之一,分為發射光學系統和接收光學系統,本文基于鏡面直徑5 mm的二維MEMS振鏡設計了發射光學系統,將25 W的半導體激光器準直為弧矢方向發散半角為1 mrad,子午方向發散半角為3 mrad的光束;設計了大相對孔徑為1:1、焦距為11.01 mm的鏡頭作為接收鏡頭,并提出采用放大倍率為2.2的纖維光錐與16線APD陣列探測器耦合,擴大接收光學系統的視場;APD陣列探測器采用選通模式,提高雷達系統的信噪比。基于此設計結果搭建激光雷達樣機,實驗驗證系統探測距離可達45 m,全視場角40? × 10?。結果表明系統可一定程度上提高激光雷達探測距離和視場角。
0引言
激光雷達是一種通過使用激光束測量目標距離的測量方法,在航空航天、軍事、氣象等國民經濟生活中得以廣泛的應用。尤其在智能駕駛領域,三維成像激光雷達是實現無人駕駛的關鍵技術之一。目前激光雷達主要的技術方案有固態激光雷達、混合固態激光雷達、機械式激光雷達,其中混合固態激光雷達采用MEMS(Micro Electro Mechanical System)掃描振鏡作為掃描機構,主要系統包括發射系統、接收系統和信號處理系統,可實現三維成像,具有遠距離,高幀率,高分辨率的優點,并且有望實現激光雷達的小型化和低成本化,是國內外車載激光雷達發展的主要趨勢之一。
光學系統作為MEMS激光雷達重要組成部分,分為發射光學系統和接收光學系統,發射光學系統的主要任務是減小發射光束的發散角,使其光束質量更好,主要設計難點是MEMS掃描振鏡的鏡面面積較小,限制光束的直徑,直接影響準直光束的發散角。接收光學系統主要任務是在保證口徑的前提下接收更大視場范圍內的回波光束,主要設計難點是光電探測器面積有限,會限制接收光學系統相對孔徑和視場。
目前國內外研究者基于MEMS掃描振鏡提出了許多不同的光學方案,Ito等開發了配備單光子CMOS焦平面探測器的MEMS激光雷達,可以測量距離高達25 m,全視場角為45? × 11?。Jae-Hyoung Park利用間接時間飛行法,搭建了基于直徑3 mm的二維MEMS掃描振鏡的激光雷達系統,實現了2 m、4 m、6 m、8 m距離處多目標物體的距離測量及三維成像。
邱琪等提出一種6個掃描子系統組成的全向激光探測雷達結構,其中發射光學天線將MEMS鏡±10 °的掃描角擴展到±30°;接收天線物鏡F數為3,視場角為67 °,視場角范圍內接收到的激光回波經過接收天線在探測器上所成的半像高小于1 mm。易可佳等研制的一種小型化實時成像的MEMS激光雷達樣機,其距離分辨率為1 cm,視場角為24°。
本文根據基于二維MEMS掃描振鏡的激光雷達系統的特性,設計了一套激光雷達的光學系統,包括激光雷達發射光學系統和匹配激光雷達大口徑、大視場探測需求與探測器小接收面積的接收光學系統,并搭建了激光雷達原理樣機。
1激光雷達結構
基于二維MEMS掃描振鏡的激光雷達系統采用飛行時間法測距,整體光路采用收發并行光路系統,光源為半導體脈沖激光器,探測器為高靈敏度的APD陣列探測器,如圖1。激光雷達工作時,控制系統使激光器發出高頻率脈沖激光,經由準直系統準直為發散角較小的光束,再控制二維MEMS掃描振鏡的偏轉角,改變出射光束方向,逐點掃描目標;目標反射的回波光束經過接收光學系統會聚到APD陣列探測器表面,APD陣列探測器上對應的單元被選通以接收光信號。控制系統基于時間飛行法(ToF)準確計算激光飛行往返路徑的時間來實現距離測量。
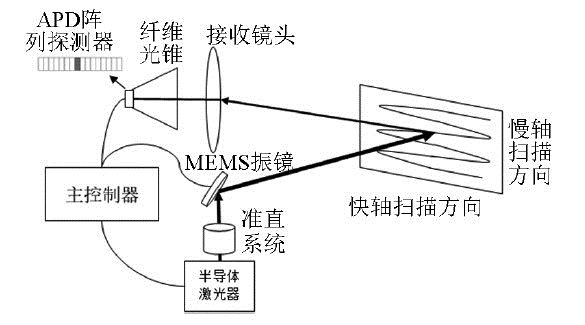
圖1 基于二維MEMS掃描振鏡的激光雷達系統示意圖
激光和微波同屬電磁波,根據微波雷達的作用距離方程可得激光雷達方程為:

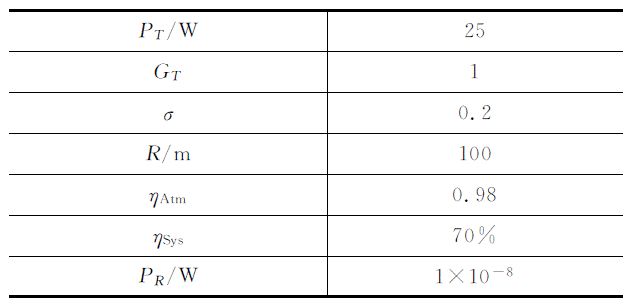
式中,PR是接收激光功率;PT是發射激光功率;GT是發射天線增益;σ是目標散射系數;D是接收孔徑;R是激光雷達到目標的距離;ηAtm是單程大氣傳輸系數;ηSys是激光雷達的光學系統的傳輸系數。根據激光雷達距離公式可知,為激光雷達設計合適的光學系統是實現激光雷達遠距離、大視場的必要條件。其中發射光學系統應盡量選用大功率激光器,且發射光束需發散角較小,遠場能量集中;若要求激光雷達探測距離大于100 m,假設激光雷達作用距離公式中各個參量的值如表1所示,則接收光學系統的入瞳直徑需大于10 mm。考慮大陣列的APD探測器成本較高,為降低激光雷達成本,采用Hamamatsu公司S13645-01CR型1 × 16線陣APD探測器,單個APD面積1 mm × 0.4 mm,總的面積為1 mm × 8 mm。當接收光學系統的入瞳直徑2d為10 mm,視場角θ為40° × 10°,根據f =d/tanθ,則接收光學系統的焦距為2.84 mm,即要求接收光學系統的相對孔徑(2d/f)為10:2.84,光學鏡頭難以滿足要求。因此,本文提出在光電探測器和接收光學系統間加入纖維光錐平衡接收光學系統在光電探測器面積一定的情況下對大口徑和大視場的需求,并且APD陣列探測器采用選通模式,降低大相對孔徑的接收鏡頭接收到的背景光的干擾,提高系統的信噪比。
表1 距離公式變量值
1.1發射光學系統設計
激光雷達光源為波長905 nm的脈沖半導體激光器,該激光器輸出功率為25 W,弧矢方向光斑尺寸為15 μm,發散角為25°(FWHM),子午方向光斑尺寸為74μm,發散角為10°(FWHM)。半導體激光器的弧矢(平行于結平面方向)、子午(垂直于結平面方向)方向發散角不同,故采用兩個母線相互垂直的柱面鏡對弧矢、子午兩個方向分別準直。根據高斯光束遠場發散角定義θ=λ/πω0,準直后束腰半徑越大,MEMS振鏡的鏡面尺寸需越大,而MEMS振鏡的掃描頻率則會隨之減小,綜合考慮激光雷達對準直后光束小發散角和MEMS振鏡高掃描頻率的要求,采用直徑5 mm的MEMS振鏡,其快軸掃描頻率為1.2KHz,慢軸掃描頻率在10 Hz左右。
利用光學仿真軟件,建立柱面鏡準直的仿真模型,如圖2所示。在距離光源45 mm的地方放置了一塊30°傾斜、直徑5 mm的反射鏡,其等效于零掃描角時的MEMS振鏡。
根據半導體激光器的發光特性,設計使用焦距為4.62 mm的非球面柱面鏡進行子午方向的準直;設計使用焦距為13.91 mm的球面柱面鏡進行弧矢方向的準直。
仿真得到準直后距離反射鏡不同距離的光斑,取峰值功率1/e2處光斑半徑,將散點擬合為直線,該直線近似為雙曲線的漸近線,直線方程為
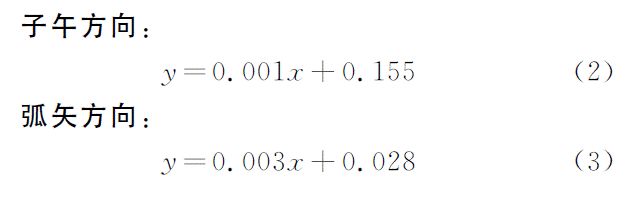
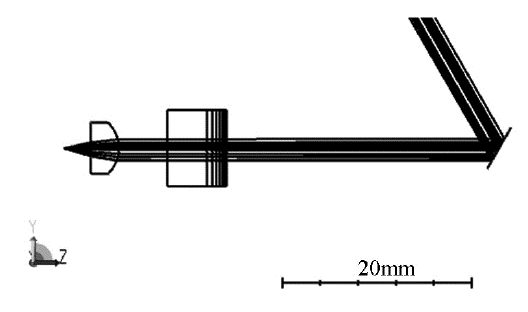
圖2 光學仿真模型
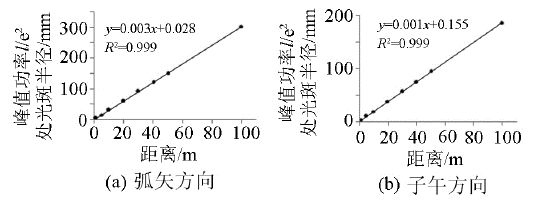
圖3 光斑半徑隨光傳播距離的曲線
直線斜率為準直后光束發散角的正切值,則
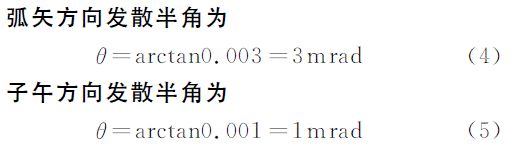

圖4 距離MEMS振鏡100 m時激光光斑截面圖
得到準直后子午方向發散半角為1 mrad,弧矢方向發散半角為3 mrad,如圖3所示。圖4給出了仿真模型中距離MEMS振鏡100 m的探測器接收到的激光光斑,該光斑總能量為24.01 W,即有96%以上的激光能量經由MEMS振鏡反射,僅有包含約4%的激光能量的光束未入射到MEMS振鏡上,沿原方向出射。
1.2接收光學系統設計
如前文所述,為滿足激光雷達遠距離光信號的探測對大口徑、大視場的要求,在接收鏡頭和APD陣列探測器間加入放大倍率為2.2的成像纖維光錐作為中繼元件。該纖維光錐由數千上萬根錐形光纖規則排列組合而成,每根錐形光纖芯徑小于6 μm,纖維光錐入射端面接收到的圖像被分解為與錐形光纖排列相對應的像元;規則排列的錐形光纖將所攜帶的像元信息一一對應地傳遞到纖維光錐的另一端;像元在傳遞過程中隨錐形光纖直徑的變化被放大或縮小,在出射端面按原排列方式組合成像。本文中纖維光錐口徑小的一端直徑10 mm,緊貼APD探測器,口徑大的一端直徑22 mm,位于接收光學鏡頭的像方焦平面位置。
綜合考慮接收光學系統的口徑和視場,接收光學的設計指標如表2。
表2 接收鏡頭設計指標
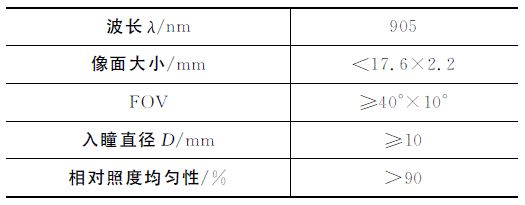
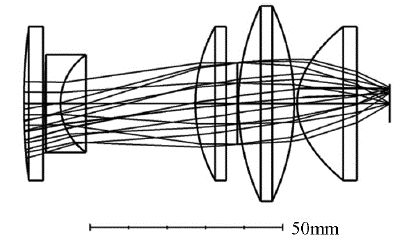
圖5 接收鏡頭仿真模型
在光學仿真軟件中選擇反遠距型鏡頭為初始結構,設置評價函數,選用市場上現有透鏡,優化系統,最終得到接收鏡頭的結構如圖5所示,共有5片鏡片組成,其中最后一個透鏡為非球面透鏡。
接收鏡頭焦距為11.01 mm,視場角為40 ° × 10 °,相對孔徑1:1,系統總長95.08 mm。圖6為接收鏡頭像平面的光跡圖,像面大小為5 mm × 2.2 mm,x方向從左至右依次為視場(0 °,0 °)、(0 °,3.5 °)、(0 °,5 °)的光線在像平面所成光斑,y方向從下至上依次為(0 °,0 °)、(14 °,0 °)、(20 °,0 °)的光線在像平面所成光斑,x方向像高1.10 mm,y方向像高為4.17mm。圖7為像平面的相對照度均勻性,20 °視場角范圍內像平面的相對照度均勻性在90%以上。

圖6 像平面光跡圖
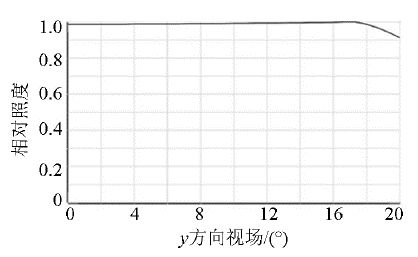
圖7 像平面相對照度均勻性
2實驗結果
根據以上仿真設計結果,結合機械設計,搭建了激光雷達的樣機,如圖8所示。其中,纖維光錐直接緊貼在拆除封裝窗口的APD陣列探測器表面,中間的空隙以松柏油填充,如圖9,可在纖維光錐的大端面看到APD陣列探測器表面的放大像,耦合效率約為74.14%。
圖8 激光雷達樣機
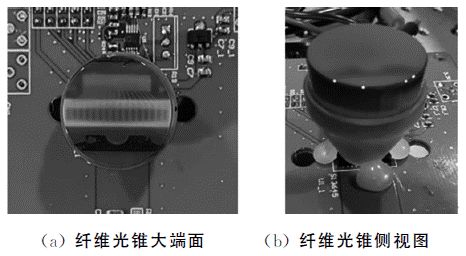
圖9 APD陣列探測器與纖維光錐耦合模塊
圖10 實驗拍攝光斑圖
在距離發射光學系統6.67 m距離的光屏上拍攝了激光光斑圖,如圖10,該光斑的光斑半徑為12.81 mm × 26.78 mm,根據tanθ=r/d,激光的發散角為0.11° × 0.23 °。
在距離激光雷達垂直距離1.5 m的前方有一面白墻,接收光學系統的光軸與墻面垂直,當發射光學系統的掃描角為(0 °,0 °)、(5 °,0 °)、(0 °,5 °)、(0 °,10 °)、(0 °,15 °)、(0 °,20 °)時,對應選通APD探測器從左至右第8個、第8個、第7個、第5個、第3個、第1個單元,APD探測器接收到的回波信號幅值及其修正后電壓幅值如表3所示,相應的計算了修正后電壓幅值與其平均值的差值占其平均值的百分比均小于10%。結果表明該激光雷達的樣機視場角為40 ° × 10 °,接收系統像平面的照度均勻性大于90%。
表3 激光雷達不同視場回波信號測試結果

將激光雷達放置在一地下車庫測試,APD探測器選通第8個單元,發射光學系統掃描角為0 °,發射系統發出的激光脈沖照射在距離樣機45 m的一面白墻上時,將接收系統可以接收到的回波信號連接在示波器上顯示如圖11所示,峰值電壓為4.45 V。
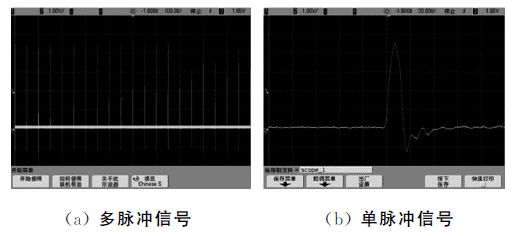
圖11 激光雷達回波信號
3結論
本文為基于二維MEMS掃描振鏡的激光雷達設計了發射光學系統和接收光學系統。系統選用直徑5 mm的MEMS掃描振鏡,利用柱面鏡將25W的半導體激光器,準直為發散角為1 mrad(子午方向)和3 mrad(弧矢方向)的光束;以放大倍率2.2的纖維光錐作為接收鏡頭和APD陣列探測器的中繼元件,設計了焦距為11.01 mm、視場角40 ° × 10°的反遠距鏡頭作為接收鏡頭,其相對孔徑1:1。APD陣列探測器采用選通模式避免大相對孔徑的接收光學系統接收到的干擾光降低雷達系統信噪比。基于仿真結果,搭建了激光雷達原理樣機,實現45 m遠目標的探測,系統全視場角40 ° × 10 °。該激光雷達系統一定程度上解決了大視場探測需求與探測器小接收面積的矛盾問題,若完善該雷達樣機的MEMS掃描振鏡驅動系統、APD陣列探測器選通系統及數據處理系統,有望實現三維成像激光雷達系統的搭建。
-
mems
+關注
關注
129文章
4511瀏覽量
199268 -
光學系統
+關注
關注
5文章
266瀏覽量
19107 -
激光雷達
+關注
關注
981文章
4516瀏覽量
196879
原文標題:基于二維MEMS振鏡的激光雷達系統的光學設計
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
[VirtualLab] 用于微結構晶片檢測的光學系統
OCAD應用:單反射鏡掃描光學系統初始結構設計
3D系統可視化

LED 太陽光模擬器的光學系統設計解析




 工商網監
工商網監
評論