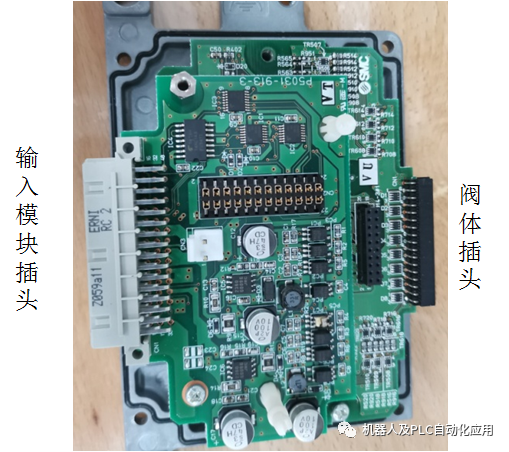
") 機(jī)器人US2時(shí)閥導(dǎo)的輸入模塊無(wú)故障
機(jī)器人US2時(shí)閥導(dǎo)的輸入模塊無(wú)故障

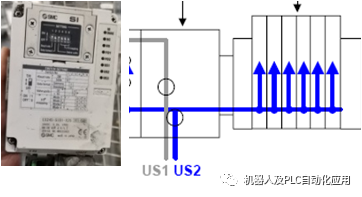
1.給上使能后SF燈亮沒(méi)有閥的輸出 更換閥頭

給上”使能”后US2電給供給,SF燈亮,通過(guò)機(jī)器人控制閥導(dǎo)無(wú)輸出,閥部動(dòng)作證明不是單純的某一個(gè)閥損壞,更換閥頭故障解決。
2.給上使能后輸入信號(hào)全無(wú)
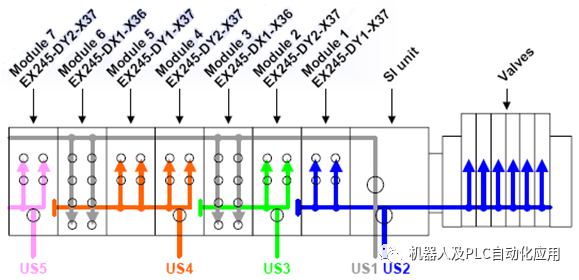
在機(jī)器人沒(méi)有給上”使能”US2時(shí)閥導(dǎo)的輸入模塊無(wú)故障,顯示正常。給上使能后輸入模塊的輸入點(diǎn)都無(wú)電,相當(dāng)于給輸入模塊斷US1。更換閥頭EX245模塊。
US1電源供給故障存在故障
3.給上使能后輸出閥組的第一位信號(hào)自動(dòng)給入,SF燈亮。
在機(jī)器人沒(méi)有進(jìn)行控制的時(shí)候,就有閥導(dǎo)的電,對(duì)其余閥進(jìn)行控制不能控制,閥無(wú)動(dòng)作。
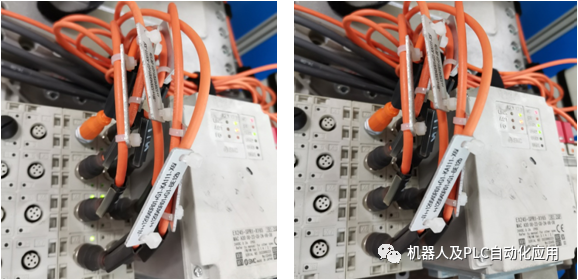
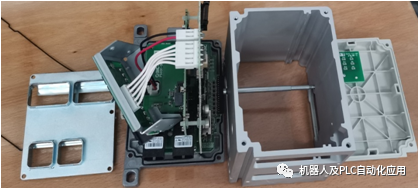
拆卸閥體測(cè)試

拆卸損壞的閥頭

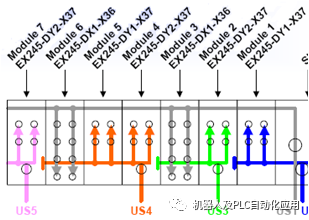
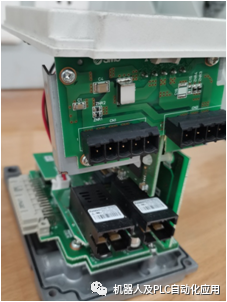
US電源分配板

電源分配板
拆解完畢
責(zé)任編輯:pj
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
電源
+關(guān)注
關(guān)注
185文章
18842瀏覽量
263595 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
31092瀏覽量
222332 -
控制閥
+關(guān)注
關(guān)注
1文章
96瀏覽量
14477
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
再談低溫?zé)Y(jié)銀的應(yīng)用:從春晚四家機(jī)器人出鏡的幕后推手說(shuō)起
、芯片封裝、功率模塊的關(guān)鍵支撐;而低溫?zé)Y(jié)銀正從實(shí)驗(yàn)室走向機(jī)器人、新能源、第三代半導(dǎo)體等產(chǎn)業(yè)核心,成為高端電子互連的 隱形推手。
一、春晚四家機(jī)器人:幕后推手與技術(shù)硬核
1 四家機(jī)器人
發(fā)表于 02-17 14:07
探索RISC-V在機(jī)器人領(lǐng)域的潛力
利用Gazebo仿真環(huán)境(在x86主機(jī)上運(yùn)行)和MUSE Pi Pro上的ROS 2節(jié)點(diǎn)進(jìn)行了聯(lián)合仿真。
? 場(chǎng)景: 在PC的Gazebo中運(yùn)行一個(gè)TurtleBot3機(jī)器人模型,MUSE Pi
發(fā)表于 12-03 14:40
RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
機(jī)器人· 應(yīng)用領(lǐng)域:迎賓機(jī)器人、養(yǎng)老機(jī)器人、導(dǎo)覽機(jī)器人· 多攝像頭輸入:同時(shí)實(shí)現(xiàn)人臉識(shí)別(迎賓)
發(fā)表于 10-29 16:41
小蘿卜機(jī)器人的故事
經(jīng)過(guò)我的申請(qǐng),
馬老師發(fā)放了,
小蘿卜機(jī)器人的,
開(kāi)發(fā)權(quán)限,
原來(lái)的小蘿卜公司,
因?yàn)榻?jīng)營(yíng)不善倒閉,
作為科研產(chǎn)品,
幾個(gè)技術(shù)對(duì)此惋惜,
自掏腰包,
要讓小蘿卜機(jī)器人,
再生,
每次聽(tīng)到小蘿卜說(shuō)
發(fā)表于 10-23 05:24
自制巡線(xiàn)解迷宮機(jī)器人(上)
為原理驗(yàn)證機(jī)且為了提高項(xiàng)目整體的開(kāi)發(fā)速度,機(jī)器人的所有元器件均采用TB上的現(xiàn)有模塊,并使用洞洞板直接焊接的方式來(lái)構(gòu)建其機(jī)械結(jié)構(gòu)和電氣連接。
在軟件層面上,該機(jī)器人內(nèi)部集成有經(jīng)典的PID閉環(huán)控制算法,可根據(jù)
發(fā)表于 10-20 10:39
機(jī)器人看點(diǎn):宇樹(shù)新專(zhuān)利可提升機(jī)器人表演效果 蔚來(lái)資本入股具身智能公司原力靈機(jī) 美信科技新設(shè)機(jī)器人制
。宇樹(shù)科技的新專(zhuān)利通過(guò)構(gòu)建環(huán)境采集模塊、地圖處理模塊、數(shù)字舞臺(tái)孿生模塊、舞蹈動(dòng)作設(shè)計(jì)模塊、軌跡規(guī)劃模塊、舞蹈合成
機(jī)器人競(jìng)技幕后:磁傳感器芯片激活 “精準(zhǔn)感知力”
故障率從 15% 降至 3% 以下。隨著磁隧道結(jié) (MTJ) 等新型技術(shù)成熟,下一代磁傳感器有望實(shí)現(xiàn)納米級(jí)精度、皮秒級(jí)響應(yīng)速度,或使機(jī)器人 “高速競(jìng)速” 最高速度提升 40%;柔性磁傳感器研發(fā)也將讓
發(fā)表于 08-26 10:02
工業(yè)機(jī)器人的特點(diǎn)
的基礎(chǔ),也是三者的實(shí)現(xiàn)終端,智能制造裝備產(chǎn)業(yè)包括高檔數(shù)控機(jī)床、工業(yè)機(jī)器人、自動(dòng)化成套生產(chǎn)線(xiàn)、精密儀器儀表、智能傳感器、汽車(chē)自動(dòng)化焊接線(xiàn)、柔性自動(dòng)化生產(chǎn)線(xiàn)、智能農(nóng)機(jī)、3D 打印機(jī)等領(lǐng)域。而智能制造裝備中工業(yè)
發(fā)表于 07-26 11:22
導(dǎo)遠(yuǎn)科技斬獲焉知人形機(jī)器人知鼎獎(jiǎng)
近日,導(dǎo)遠(yuǎn)科技憑借其在高精度定位領(lǐng)域的技術(shù)和產(chǎn)品,收獲首屆“焉知人形機(jī)器人知鼎獎(jiǎng)”之人形機(jī)器人創(chuàng)新獎(jiǎng),并榮獲供應(yīng)鏈杰出供應(yīng)商稱(chēng)號(hào)。
盤(pán)點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
地瓜機(jī)器人RDK X5開(kāi)發(fā)套件地瓜機(jī)器人RDK X5開(kāi)發(fā)套件產(chǎn)品介紹 旭日5芯片10TOPs算力-電子發(fā)燒友網(wǎng)機(jī)器人開(kāi)發(fā)套件 Kria KR260機(jī)器人開(kāi)發(fā)套件 Kria KR260-
發(fā)表于 05-13 15:02
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】視覺(jué)實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
閱讀心得體會(huì):ROS2機(jī)器人視覺(jué)與地圖構(gòu)建技術(shù)
通過(guò)對(duì)本書(shū)第7章(ROS2視覺(jué)應(yīng)用)和第8章(ROS2地圖構(gòu)建)的學(xué)習(xí),我對(duì)機(jī)器人視覺(jué)感知和
發(fā)表于 05-03 19:41
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門(mén)的引路書(shū)
ROS的全稱(chēng):Robot Operating System 機(jī)器人操作系統(tǒng)
ROS的 目的 :ROS支持通用庫(kù),是通信總線(xiàn),協(xié)調(diào)多個(gè)傳感器
為了解決機(jī)器人里各廠商模塊不通用的問(wèn)題,讓機(jī)器人
發(fā)表于 04-30 01:05
電機(jī)軟啟動(dòng)器無(wú)故障報(bào)警停機(jī)原因分析與控制系統(tǒng)改造
:電機(jī)軟啟動(dòng)器無(wú)故障報(bào)警停機(jī)原因分析與控制系統(tǒng)改造.pdf
【免責(zé)聲明】本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問(wèn)題,請(qǐng)第一時(shí)間告知,刪除內(nèi)容!
發(fā)表于 04-27 19:29
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】+ROS2應(yīng)用案例
的知識(shí),還需要對(duì)ROS 2的節(jié)點(diǎn)通信和數(shù)據(jù)處理有一定的了解。通過(guò)實(shí)踐這一部分內(nèi)容,我掌握了如何在ROS 2中實(shí)現(xiàn)二維碼識(shí)別,這對(duì)于提高機(jī)器人的智能性和交互性具有重要意義。
地圖構(gòu)建:SLAM技術(shù)
發(fā)表于 04-27 11:42
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
《ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐》內(nèi)容閱讀初體驗(yàn)
《ROS 2 智能機(jī)器人開(kāi)發(fā)實(shí)踐》是一本針對(duì) ROS 2(Robot Operating S
發(fā)表于 04-27 11:24



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論