 數控機床的作業原理
數控機床的作業原理

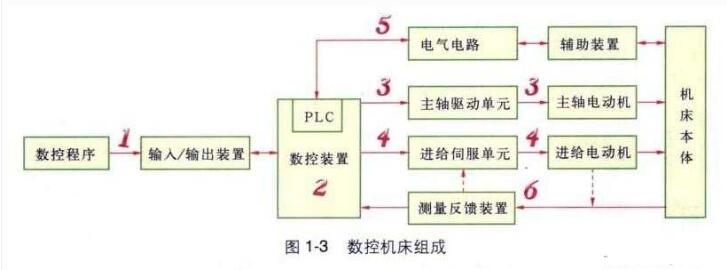
數控機床的作業進程如下:
(1)數控體系通過輸入/輸出設備來預讀取數控程序,并將數控程序中的指令代碼進行二進制代碼改換,并存人數控設備。
(2)數控機床中除有軌道及定位操控功用外,還要有機床的邏輯動作操控功用,這既央求在機床的電氣操控中既稀有字操控體系NC又有邏輯操控體系plc,二者之間通過紛歧樣的數據區進行信號和數據的溝通。所以從功用視點來說,數控設備包含這兩大大都,而且二者操控計劃紛歧樣。NC操控進給運動和主軸翻滾,PLC用于數控機床的外圍輔佐電氣的操控。
(3)對應數控機床主軸電動機的操控設備,稱為主軸驅動單元。其接納來自救控設備宣告的速度指令來操控主軸電動機的轉速、啟停和轉向。
(4)進給伺服單元即是指進給伺服驅動器,其承受數控設備的速度或方位指令。進繪伺服電動機繞組電流的頻串和巨細,使伺服電動機轉子的轉速或轉角挨近速度或疽,并通過查看伺服電動機的編碼器取得伺服電動機轉子或轉角實習值與指令值的過失,進給驅動單元不斷調整流過伺服電動機繞組電流的頻率和巨細,使得伺服電動機轉子轉速或轉角實習值與指令值的過失操控在央求的計劃內。
(5)PLC的操控信號通過電氣電路驅動輔佐設備的實施元件作業。電氣電路包含強電電路和弱電電路,PLC的操控信號通過由弱電電路中的繼電器或改換電路成為能聯接到強電電路的信號,再由強電回路驅動輔佐設備實施元件作業,比照如刀庫、換刀安排、冷卻液等的作業進行操控。
(6)此處的閉環體系有兩種辦法,一種是速度環,一種是方位環。速度環由測速設備和速度操控單元構成。方位環由方位查看單元和伺服單元等構成。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
數控機床
+關注
關注
19文章
873瀏覽量
49817
發布評論請先 登錄
相關推薦
熱點推薦
數控機床上下料改造的技術路徑與實施方案
數控機床的上下料改造是提升制造業生產效率、減少人工干預的重要手段。通過引入機械臂、自動化控制系統、視覺識別技術等先進技術,數控機床的上下料過程實現了自動化、智能化,極大地提升了生產效率和加工精度。

實現數控機床在不同網段通信的解決方案
數控機床作為工業生產核心設備,其跨網段通信需求日益頻繁。特別是對于老舊設備和海外設備來說,出現IP重復沖突的現象頻發,對設備接入局域網造成較大困擾。此外,修改IP的方式成本高且效率低,同時會干擾到

數控機床的物聯網智慧管理解決方案
在過去,生產管理人員需要前往車間進行巡查才能了解哪些機床在執行加工任務、主軸負載狀態、刀具使用壽命等信息,不僅工作量大、效率低下,還難以及時發現潛在問題。對此,數之能提供廣泛通用的數控機床物聯網平臺

數控機床物聯網平臺有哪些推薦?哪個好用?
數控機床作為制造業生產加工的核心裝備,其智能化升級是企業提升生產效率、降低運維成本的關鍵抓手。隨著工業物聯網技術的深度滲透,數控機床物聯網平臺應運而生,成為連接設備、數據與決策的重要載體。 基于政策
數控機床物聯網網關有哪些推薦?哪個好用?
在智能制造與工業4.0浪潮的推動下,數控機床的物聯網化已成為提升生產效率、實現智能化管理的關鍵路徑。然而,面對市場上琳瑯滿目的物聯網網關品牌和型號,如何選擇一款既可靠又高效的數控機床物聯網網關,成為
零機床配置改動!SycoTec數控機床高速電主軸革命性升級方案來了
在現代制造業中,數控機床的性能對于生產效率和產品質量起著決定性作用。隨著工業4.0和中國制造2025的推進,市場對高速度、高精度機床的需求日益增長,傳統數控機床在加工速度和精度方面的局限性愈發凸顯

干貨總結——SycoTec數控機床高速主軸選型必看
在數控機床的精密世界里,主軸是當之無愧的“心臟”,其性能直接決定了加工精度、效率和設備的整體表現。SycoTec作為全球領先的精密主軸制造商,憑借數十年的技術沉淀和持續創新,其數控機床主軸在各行各業
多摩川協議編碼器:助力數控機床行業邁向智能制造
多摩川協議編碼器:助力數控機床行業邁向智能制造 在當今制造業快速發展的浪潮中,智能制造已成為數控機床行業的核心發展方向。而編碼器作為數控機床中至關重要的檢測元件,對機床的精度、穩定性和
工業智能網關支持采集數控機床嗎
工業智能網關支持采集數控機床的數據。數控機床作為工業自動化生產中的核心設備,其運行數據的采集和監控對生產效率、設備維護及質量管控至關重要。工業智能網關憑借其兼容性、協議適配能力及數據處理特性,可滿足數控機床
探秘高速電主軸在數控機床中的關鍵賦能作用
在科技飛速發展的今天,制造業正經歷著前所未有的變革,數控機床作為現代制造業的核心裝備,其性能的優劣直接影響著產品的質量與生產效率。而在數控機床眾多關鍵部件中,高速電主軸憑借其獨特的技術優勢,成為推動機床


BK 機床控制變壓器在數控機床中真的不可或缺嗎?
在數控機床的運行過程中,你是否對BK機床控制變壓器的作用心存疑惑呢?今天就來深入探討一番。BK機床控制變壓器主要用于將機床輸入的高電壓轉換為適合數控



 工商網監
工商網監
評論