 同軸接觸式微波旋轉關節性能測試方法淺析
同軸接觸式微波旋轉關節性能測試方法淺析

摘要:在對同軸接觸式微波旋轉關節簡要介紹的基礎上,結合其實際應用過程中性能參數的測試經驗,提出了精確測試和粗略測試兩種測試方法,并對這兩種測試方法的測試情況進行了對比分析和總結,為此類產品的測試提供了相關借鑒經驗和方法。
關鍵詞:微波旋轉關節;同軸接觸式;測試方法
1、引言
微波旋轉關節是一種用于實現兩個相對轉動機構間射頻信號傳送的連接器件,主要用于連續旋轉平臺在360°無限連續旋轉過程中保持射頻信號連續不斷的向固定平臺傳輸。例如,在雷達天線系統中微波旋轉關節是其中一個保證天線正常工作的關鍵部件,在天線360°不停旋轉的情況下,可將微波信號從發射機傳輸到天線,或從天線傳輸給接收機,實現方位和俯仰的搜索;在機載光電吊艙系統中,高清相機、紅外相機等在360°旋轉過程中將采集到的高速圖像視頻信號也通常通過微波旋轉關節將其傳送到接收機中進行觀測和存儲。微波旋轉關節按接觸形式可分為接觸式和非接觸式兩種,接觸式主要以同軸式旋轉關節為主,其具有傳輸頻帶寬、體型小、通用性強等諸多優點,缺點是一般壽命較短、環路較少;非接觸式主要以波導式旋轉關節為主,其主要優點是壽命長、結構簡單,缺點是一般體積較大、傳輸頻帶窄等。同時也可將兩種接觸形式的旋轉關節集成在一起形成集成式旋轉關節以滿足不同應用場合的需求。本文在此基礎上,主要分析介紹同軸接觸式單路、雙路、三路微波旋轉關節在實際工程應用中快速有效測試分析其性能的方法及經驗。
2、同軸接觸式微波旋轉關節
同軸接觸式微波旋轉關節以其傳輸頻帶寬、體型小、通用性強等優點而得到越來越廣泛的應用,其一般應用在安裝空間小、需求環路少(一般1-3路)、傳輸頻率相對低(一般在20GHz以下)的場合。此類旋轉關節一般兩端均為標準的射頻同軸接頭,如SMA、N型、BNC、2.92mm、3.5mm等,十分方便與帶有同類型射頻接頭的同軸線纜直接連接在一起使用。目前,國外已有多家公司生產出多種此類適用于不同場合的通用型旋轉關節,例如德國的斯必能公司(如Spinner BN 835047、Spinner BN 153127等)、美國鉆石公司(如Diamond Antenna 18-2124-0,2244A-0等)、美國科巴姆公司Cobham、Kevlin等公司以及瑞典Siverslab公司(PM7892等)等,這些公司的產品技術和工藝都已比較成熟,其壽命一般能達到500萬轉及以上。如圖1為斯必能公司的Spinner BN 835047型單路微波旋轉關節,圖2為鉆石公司的2244A-0型雙路微波旋轉關節,圖3為斯必能公司的某型三路微波旋轉關節。國內也有多家研究院所和企業研究生產出此類產品,如航天科工二院二十三所、中電14所等,以同軸式單路微波旋轉關節為例,同國外相比國內主要表現出兩方面的不足:一是壽命較短,二是體型較大。
圖1、Spinner BN 835047
圖2、Diamond Antenna 2244A-0
圖3、Spinner 3-Channel Rotary Joint
3、主要技術指標分析
以單路同軸式微波旋轉關節Spinner BN 835047主要參數指標為例(如表1所示),對影響同軸式微波旋轉關節傳輸性能的關鍵指標進行分析。
表1、Spinner BN 835047主要參數指標
| 頻率范圍 | DC-18GHz | 旋轉速度(Max) | 200rpm |
| 接口形式 | SMA-F-SMA-F(50Ω) | ★壽命(Min) | 500萬轉 |
|
★電壓駐波比 (VSWR,Max) |
1.3@DC to 10GHz 1.4@10 to 18GHz |
重 量 | 0.028kg |
|
★電壓駐波比跳動 (VSWR WOW) |
0.05 | 工作溫度 | -55 to +85℃ |
|
★插入損耗 (Insertion Loss,Max) |
0.25dB @DC to 10GHz 0.3dB @10 to 18GHz |
啟動力矩(Max) | 0.5 Ncm |
|
★插入損耗跳動 (Insertion Loss WOW) |
0.05dB | 峰值功率 | 3kW |
|
★相位跳動 (Phase Wow) |
1° | 平均功率 |
200W@ 1GHz 30W@ 18GHz |
表1中的14項參數是單路同軸接觸式微波旋轉關節涉及到的比較重要的參數指標,多路旋轉關節在此基礎上需要增加一個重要參數指標—隔離度,其中電壓駐波比跳動是指微波旋轉關節在旋轉過程中電壓駐波比最大值與最小值之差,插入損耗跳動、相位跳動均類似。表中標注帶“★”的參數是所有參數指標中最為關鍵的參數,這些參數指標的好壞將直接決定其產品性能的好壞,因此,單路旋轉關節在使用之前必須對這些關鍵參數指標進行檢測和測試驗證,多路旋轉關節在此基礎上還需要增加隔離度參數的測試驗證,進而確定其能否滿足使用要求。以上標注帶“★”的參數指標目前主要通過微波矢量網絡分析儀來進行測試,測試結果直接以圖形曲線顯示。目前,矢量網絡分析儀國外廠家(品牌)主要有美國是德科技(原安捷倫電子測量事業部)、德國羅德與施瓦茨(R&S)和日本安立,國內僅有中電41所的種類相對齊全、測試頻率相對較高。
4、測試方法分析
對于生產制造企業來說,同軸接觸式微波旋轉關節出廠前的最后一個關鍵環節就是性能指標測試,對于用戶來說,在使用前也必須對旋轉關節的性能指標再次進行驗證和測試,因此,找到一種合適的測試方法對其十分重要。根據實際工作經驗,初步總結出兩大類測試方法,分別為精確測試和粗略測試,其中精確測試又包含三種不同的測試方法,而不同的測試方法具有不同的優勢和缺點。
4.1、精確測試
根據被測關節連接方式不同分為三種測試方法:(1)被測關節連接測試負載;(2)被測關節連接測試跳線;(3)被測關節連接標準關節。
(1)被測關節連接測試負載;該測試方法比較簡單,以兩端為SMA接口的單路微波旋轉關節為例,假設矢量網絡分析儀的輸入/輸出端接口為3.5mm型,由于SMA與3.5mm接口兼容,所以可以直接將旋轉關節的靜止端與矢網的其中一個輸入/輸出端相連,將旋轉關節的旋轉端與校準件中的負載直接相連,具體如圖4示意所示。如果輸入/輸出端為N型接口,還需要外加N轉SMA轉接頭轉換后再進行連接。此種方式可以通過手動連續旋轉負載或者程控電機帶動負載連續旋轉即可測試電壓駐波比、電壓駐波比跳動、隔離度、壽命參數指標。
(2)被測關節連接測試跳線;此種方式是最常用的測試方法,仍以(1)中的旋轉關節和矢量網絡分析儀為例,將旋轉關節的兩端SMA接口分別與兩根帶3.5mm接口的測試線纜的一端相連,測試線纜的另一端分別連接矢量網絡分析儀的兩個輸入/輸出端,具體如圖5示意所示。此種方式可以通過手動非連續旋轉(先慢速正向旋轉360°,再慢速反向旋轉360°,以此往復)被測關節旋轉端或者程控電機帶動被測關節旋轉端非連續旋轉(先慢速正向旋轉360°,再慢速反向旋轉360°,以此往復)即可測試電壓駐波比、電壓駐波比跳動、插入損耗、插入損耗跳動、相位跳動、隔離度參數指標。
(3)被測關節連接標準關節;此種方式需要備置一個與被測關節同類型的標準旋轉關節,仍以(1)中的旋轉關節和矢量網絡分析儀為例,將被測關節和標準關節旋轉端的SMA接口通過測試轉接頭連接在一起,被測關節和標準關節靜止端的SMA接口分別與兩根帶3.5mm接口的測試線纜的一端相連,測試線纜另一端分別連接矢量網絡分析儀的兩個輸入/輸出端,具體如圖6示意所示。此種方式可以通過手動連續旋轉被測關節和標準關節旋轉端之間的測試轉接頭或者程控電機帶動兩者之間的轉接頭連續旋轉即可測試電壓駐波比、電壓駐波比跳動、插入損耗、插入損耗跳動、相位跳動、隔離度、壽命參數指標。
以上三種測試方法在正式測試之前均需要按照要求對矢量網絡分析儀和測試線纜進行校準,校準完成后方可按照以上方式進行精確測量。以上三種測試方式測試情況對比如表2所示。
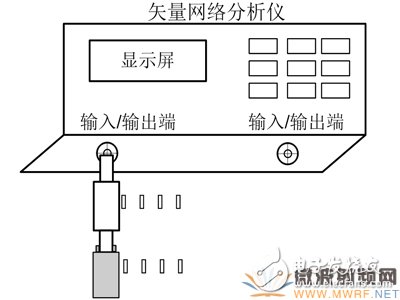
圖4、被測關節連接測試負載
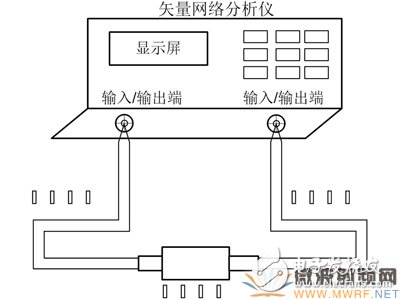
圖5、被測關節連接測試跳線
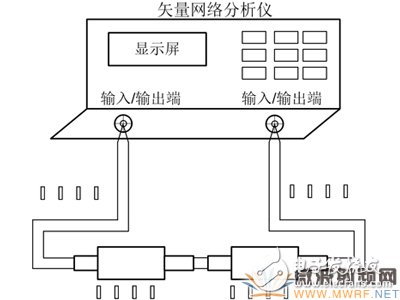
圖6、被測關節連接標準關節
表2、三種測試方式測試情況對比表
| 測試情況 | 第一種測試方式 | 第二種測試方式 | 第三種測試方式 |
| 被測關節連接對象 | 負載 | 跳線 | 標準關節 |
| 所需器件成本 | 低 | 中 | 高 |
| 測量損耗 | 低 | 中 | 高 |
| 是否可以連續旋轉 | 是 | 否 | 是 |
| 是否可高速旋轉 | 是 | 否 | 是,但不建議 |
| 可測量關鍵指標種類 | 電壓駐波比、電壓駐波比跳動、隔離度、壽命 | 電壓駐波比、電壓駐波比跳動、插入損耗、插入損耗跳動、相位跳動、隔離度 | 電壓駐波比、電壓駐波比跳動、插入損耗、插入損耗跳動、相位跳動、隔離度、壽命 |
| 關鍵指標測量情況 | |||
| 電壓駐波比 | 精確測量 | 精確測量 | 非精確測量 |
| 電壓駐波比跳動 | 精確測量 | 精確測量 | 非精確測量 |
| 插入損耗 | 無法測量 | 精確測量 | 非精確測量 |
| 插入損耗跳動 | 無法測量 | 精確測量 | 非精確測量 |
| 相位跳動 | 無法測量 | 精確測量 | 非精確測量 |
| 隔離度 | 精確測量 | 精確測量 | 非精確測量 |
4.2、粗略測試
由于同軸接觸式旋轉關節其內、外導體依靠彈性件進行旋轉摩擦接觸傳輸微波信號,所以相互摩擦的部件的彈性強度和耐磨強度的好壞直接影響和決定了此類關節的傳輸性能。因此,為了更好的掌握此類關節的性能情況和壽命,對其性能狀況和壽命做一些相應的初步測試和驗證是必不可少的。由于一套矢量網絡分析儀價格一般達十幾萬甚至幾十萬,對于中小企業來說,特別是在此類關節產品用量較少的情況下,直接購買矢量網絡分析儀進行測試其性價比較低,因此,采用一種粗略測試的方法相對比較實用。
同軸接觸式旋轉關節可以傳輸頻率從直流到上GHz的信號,因此,可以采用將1080P高清攝像頭拍攝的高清視頻信號通過旋轉關節傳輸到顯示器進行觀測視頻顯示質量的方法。由于一旦旋轉關節旋轉過程中性能表現不好,其在顯示器上的直接表現就是視頻出現閃屏、瞬間黑屏等現象,非常容易、直觀地觀測到。具體測試方法為:以單路微波旋轉關節為例(假設其兩端接口為SMA型),首先需要備置一臺1080P高清攝像頭、一套帶測試工裝的程控電機、一個顯示器和兩根BNC轉SMA的同軸線,其中攝像頭視頻輸出接口和顯示器輸入接口均為BNC型,并且可以通過可充電電池為其供電,其程控電機可以調速和正反轉即可;其次,將攝像頭的視頻輸出接口BNC與其中一根同軸線的BNC端相連,同軸線的SMA端連接旋轉關節的旋轉端,以上部分全部固定安裝在測試工裝上與電機一起旋轉,而旋轉關節的靜止端與另外一根同軸線的SMA端相連,同軸線的BNC端與顯示器的BNC接口進行相連形成靜止部分;最后,整套系統搭建完畢后即可打開攝像頭和顯示器電源,并控制電機按預定轉速旋轉,直接觀測顯示器顯示效果即可。
5、結語
同軸接觸式微波旋轉關節在本質上可以看作是一種能360°無限旋轉的特殊同軸線。因此,本文結合實際工作經驗,在借鑒同軸線性能測試方法的基礎上,對同軸接觸式微波旋轉關節及其測試方法進行了分析和總結,并提出了兩種測試方法,分別是精確測試和粗略測試,其中精確測試中三種測試方式各有自己的優缺點,在實際測試時應根據自身實際情況選擇相應測試方式,從而達到投入少、測試效果好的效果。此外,采用粗略測試方法雖然無法直接測試出微波旋轉關節的各項具體參數指標,但可間接檢測出其相關動態性能指標的好壞和實現壽命驗證,對于中小企業用戶來說其具有投入少、實現操作簡單、性價比高和觀測直觀的特點。
作者:王斌,周萍
(1九江精達檢測技術有限公司, 江西九江 332008)
(2中國船舶工業集團公司第6354研究所, 江西九江 332000)
參考文獻:
[1] 范鴻健.航天器同軸式微波旋轉關節特性研究[D].國防科學技術大學,2008.
[2] 田鋒偉.一種射頻同軸連接器回波損耗的測試方法[J].電子世界,2013(15):66.
[3] 謝平,廖勇,楊周炳等.超寬帶高功率同軸旋轉關節[J].強激光與粒子束,2011,23(11):3095-3098.
[4] 一種同軸式微波旋轉連接器的設計.http://www.mwrf.net/tech/conn/2016/18867.html.
[5] 旋轉關節測試系統.http://pmof891f8.pic21.websiteonline.cn/upload/celiangxitong_3t11.pdf.
-
微波
+關注
關注
16文章
1085瀏覽量
86000 -
SMA
+關注
關注
4文章
295瀏覽量
27892
發布評論請先 登錄
人形機器人關節模組關鍵技術解析,及產業鏈上游電機/傳感器企業一覽

高壓功率放大器在超聲電機性能測試與閉環實驗中的應用

Pasternack 高頻同軸線纜在測試測量與微波應用中的深入解析

GT-BGA-2002高性能BGA測試插座
INSTABEND TM 086高性能微波組件:靈活互聯的理想之選
INSTABEND TM 086高性能微波組件:設計與應用全解析

探索 PSCR - 360 高精度非接觸式旋轉傳感器的卓越性能
極細同軸線的線徑與EMI性能的權衡與評估方法
7/16波導至同軸直角適配器ATM Microwave
機器人關節模組:類型、設計、工作原理及應用

利用矢量網絡分析儀測試大動態范圍微波器件的幾種方法

集成MT6701磁編芯片的機器人關節模塊化設計與驅動優化

JMC1200N柔性不可扭曲波導JUPITER
機器人如何選擇編碼器方案?
人形機器人之26家電機制造商盤點



 工商網監
工商網監
評論