") 怎樣用藍(lán)牙和LabVIEW控制Servos
怎樣用藍(lán)牙和LabVIEW控制Servos

步驟1:材料
1)LabVIEW
2)LabVIEW MakerHub LINX
3)PmodBT2
4) PmodCON3
5)chipKIT WF32
6)2個(gè)Micro Servos
*有些鏈接指向引言中未鏈接的所有產(chǎn)品。
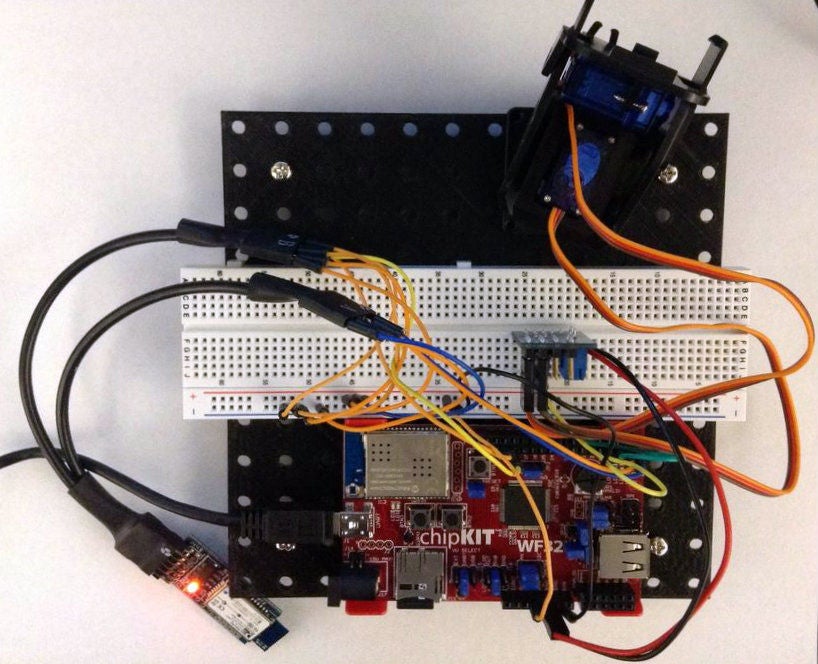
步驟2:接線!!
好了,現(xiàn)在我們有了零件,我們需要組裝它們!
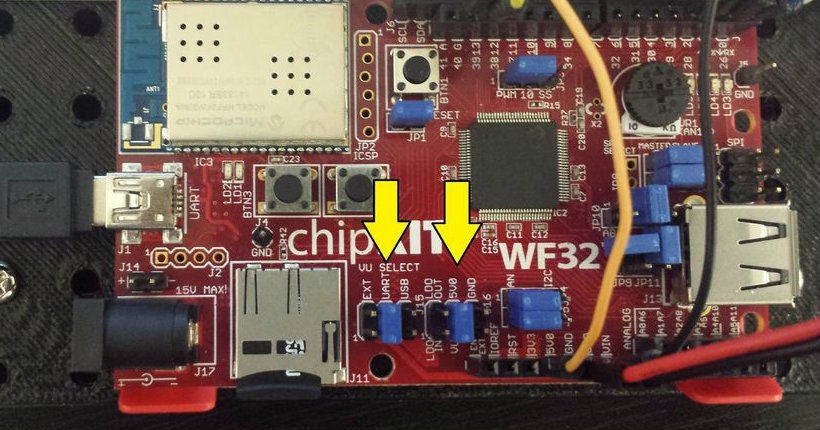
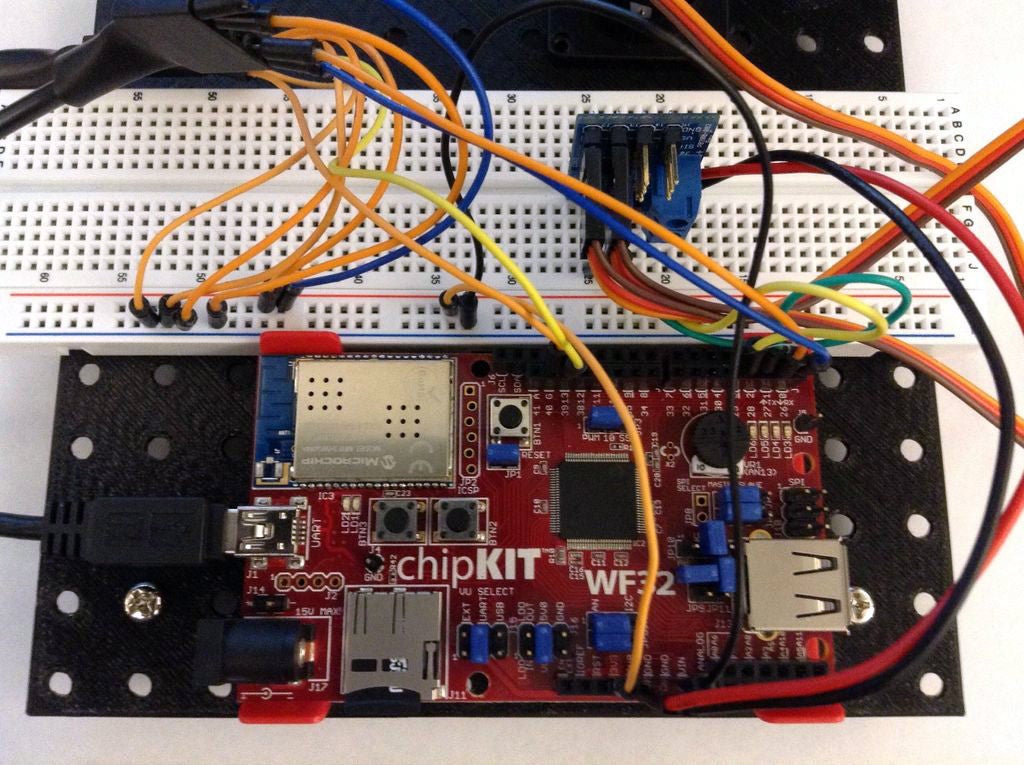
查看上面的圖片,以確保您具有正確的跳線設(shè)置。這樣可以確保開發(fā)板可以輸出為微型伺服器供電所需的5V。
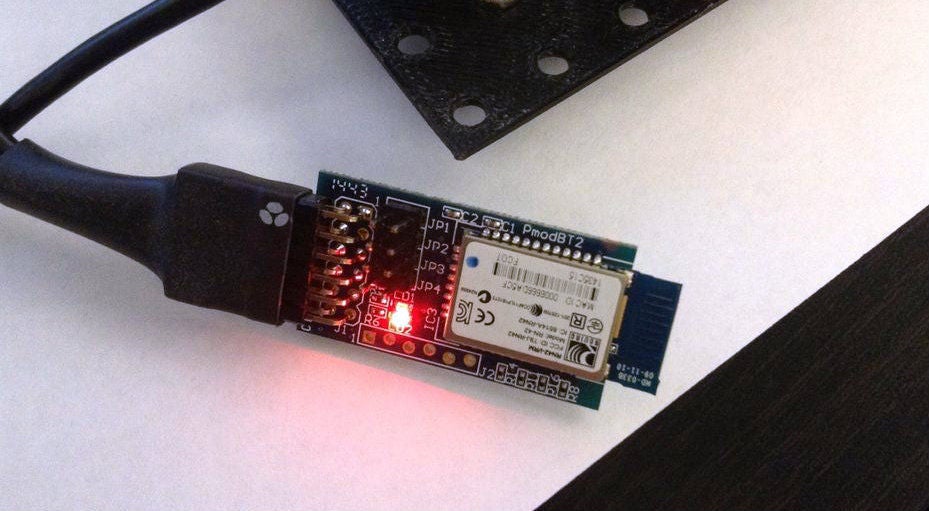
接下來,讓我們連接PmodBT2。從PmodBT2參考手冊(cè)中,我們可以看到連接器J1上的第一個(gè)引腳是RTS,然后一直到引腳12的連接是:RX,TX,CTS,GND,VCC,STATUS,?RST,NC,NC,GND ,然后再次輸入VCC。由于WF32沒有CTS和RTS連接,因此只需將這些引腳接地即可。接下來,根據(jù)WF32(UART1)的輔助UART連接連接RX和TX。在這種情況下,WF32的TX為引腳40,而WF32的RX為引腳39。將WF32的TX連接至PmodBT2的RX,并將WF32的RX連接至PmodBT2的TX。換句話說,將PmodBT2上的第二個(gè)引腳連接到WF32上的引腳40,將PmodBT2上的第三個(gè)引腳連接到WF32上的引腳39。
將BT2上的引腳7連接到WF32上的引腳26。 BT2上的8引腳連接到WF32上的引腳27。另外,將接地和3.3V連接線連接到PmodBT2(不要忘記將CTS和RTS接地)。
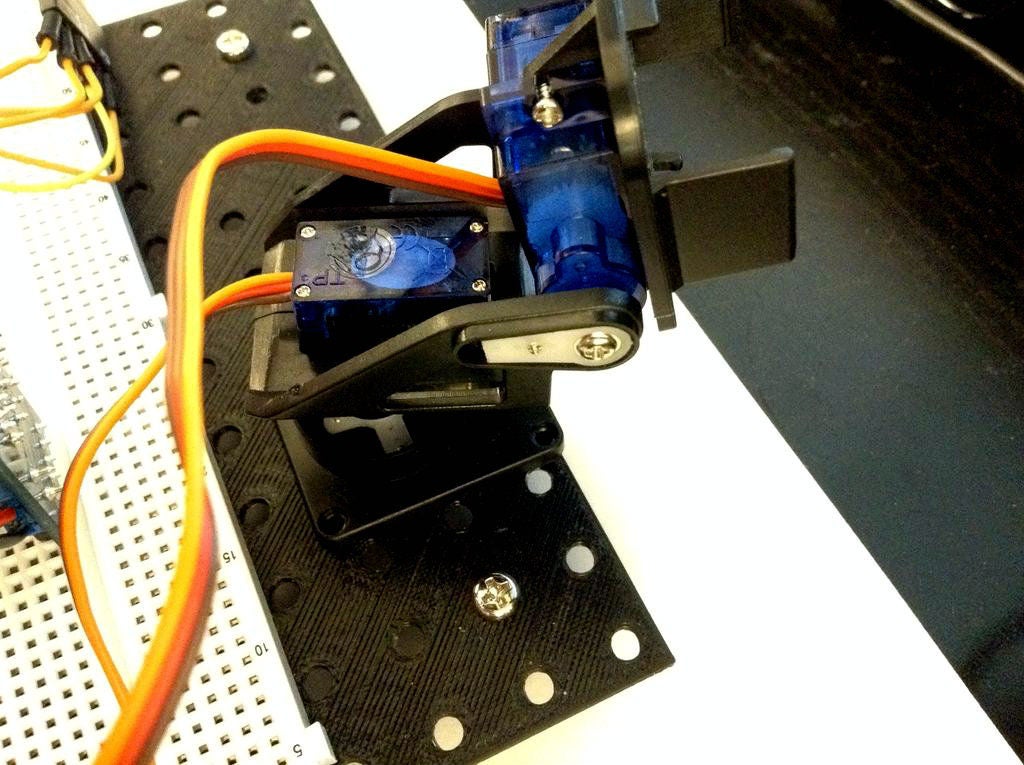
步驟3:完成接線
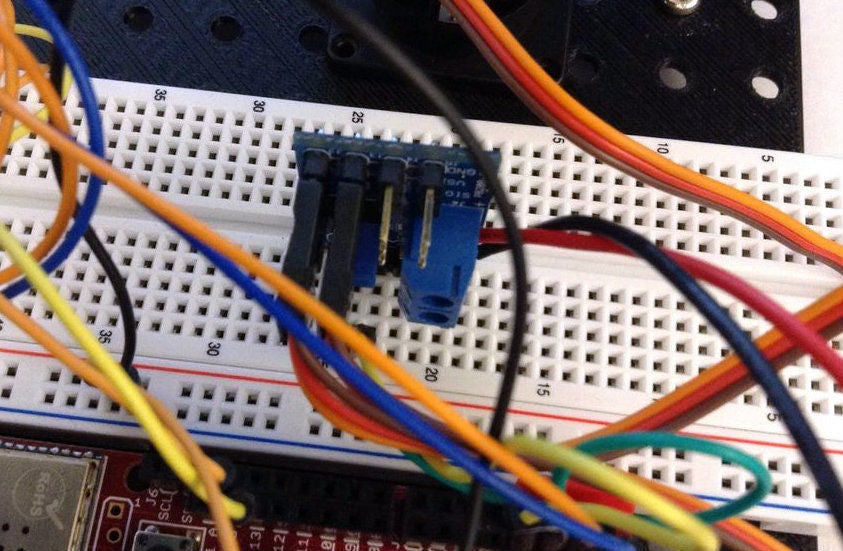
現(xiàn)在我們要做的就是將微型伺服器連接到PmodCON3,然后連接數(shù)據(jù)線以控制伺服器。將一個(gè)伺服器連接到P1,將另一個(gè)伺服器連接到P2。然后,將一根導(dǎo)線從6針接頭連接器上的第一個(gè)引腳連接到WF32上的數(shù)字通道28,并將一根導(dǎo)線從6針接頭連接器上的第二個(gè)引腳連接到WF32上的數(shù)字通道29。然后,將5V電源線連接到正極螺釘端子,將地線連接到負(fù)極螺釘端子。將5V連接到WF32上的5V0,并將接地連接到WF32上的GND。
好,我們完成了接線(最后)。
步驟4: LabVIEW代碼


下載以下VI并將其打開。 LINX設(shè)置在前面板的左側(cè)。選擇您的電路板連接到的COM端口,并使用UART通道1。
前面板上的下一部分是可以向PmodBT2發(fā)送命令的地方。查閱RN-42數(shù)據(jù)表以獲取所有命令的列表。要進(jìn)入命令模式,請(qǐng)?jiān)诿畎l(fā)送中輸入$$$,然后單擊發(fā)送命令。如果成功,則應(yīng)閱讀Raw Reading中的CMD。要退出命令模式,請(qǐng)切換“添加”按鈕以將回車添加到變速器中,然后在命令中輸入---以發(fā)送并單擊send命令。如果成功,則應(yīng)閱讀Raw Reading中的END。輸入命令時(shí),如果成功,則應(yīng)在Raw Reading中讀取AOK,如果失敗,則應(yīng)讀取ERR。
默認(rèn)情況下,RN-42通過UART以115200 Baud的速率進(jìn)行通信。
步驟5:電話申請(qǐng)和完成說明
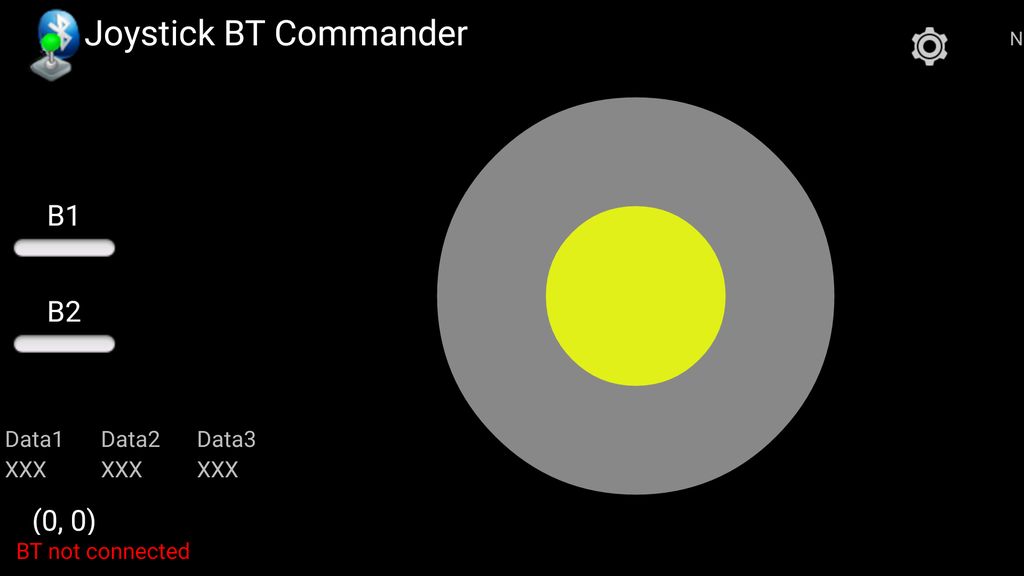

對(duì)于這個(gè)項(xiàng)目,我在Android上使用了Joystick藍(lán)牙Commander(如上圖)。打開應(yīng)用程序并連接到PmodBT2。我的PmodBT2被命名為RNBT-A5CF。連接后,您應(yīng)該能夠在Raw Data指示器中讀取8個(gè)ASCII字節(jié)(一個(gè)為空,六個(gè)用于UDLR,一個(gè)結(jié)束傳輸字節(jié))。
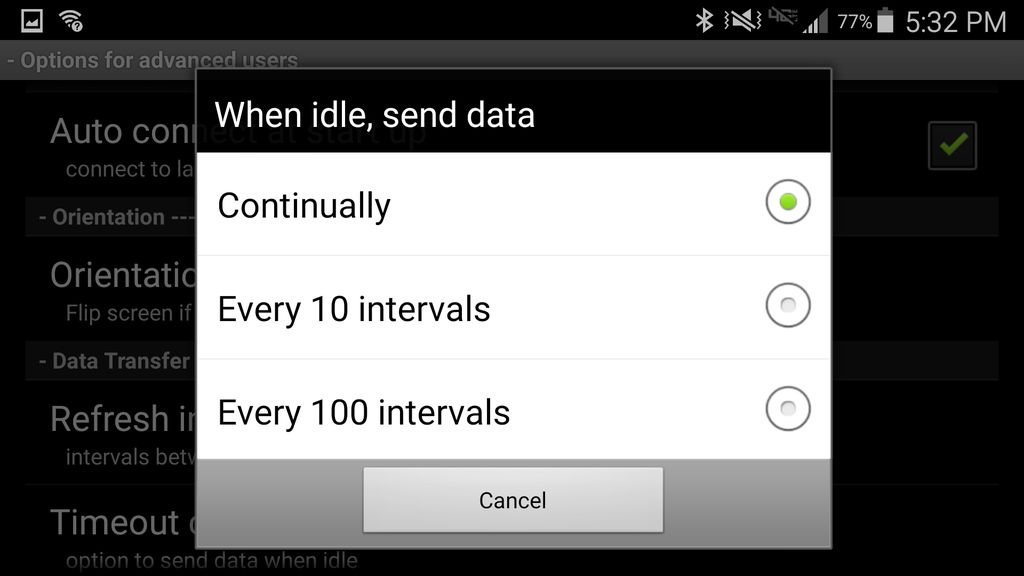
當(dāng)操縱桿靜止時(shí),PmodBT2的X和Y值都將讀取為200。這些值的范圍從100到300,具體取決于操縱桿的位置。在應(yīng)用程序選項(xiàng)中,確保將數(shù)據(jù)傳輸間隔設(shè)置為100 ms,并在空閑時(shí)連續(xù)發(fā)送數(shù)據(jù)(如上圖所示)。
根據(jù)操縱桿的方向,相應(yīng)地移動(dòng)伺服器。例如,如果操縱桿向上和向左移動(dòng),則伺服器將向上和向左旋轉(zhuǎn)(每個(gè)軸一個(gè)伺服器)。
您完成了!嘗試以此為指導(dǎo)來建立自己的藍(lán)牙連接。
-
LabVIEW
+關(guān)注
關(guān)注
2017文章
3688瀏覽量
347334 -
藍(lán)牙
+關(guān)注
關(guān)注
119文章
6325瀏覽量
178816
發(fā)布評(píng)論請(qǐng)先 登錄
藍(lán)牙網(wǎng)絡(luò)照明控制在商業(yè)建筑中的應(yīng)用
labview怎么精準(zhǔn)的控制副本vi的啟停
信號(hào)發(fā)生器遠(yuǎn)程控制LabVIEW自動(dòng)化方法技巧
Arduino與LabVIEW聯(lián)合編程指南
Labview與低功率藍(lán)牙(5.0版本)怎么連接和通信
基于STM32藍(lán)牙控制小車系統(tǒng)設(shè)計(jì)(硬件+源代碼+論文)下載
LabVIEW的詳細(xì)簡(jiǎn)介和應(yīng)用(文末免費(fèi)分享LabVIEW相關(guān)資料合集)

LabVIEW運(yùn)動(dòng)控制(五):EtherCAT運(yùn)動(dòng)控制器的心跳檢測(cè)功能

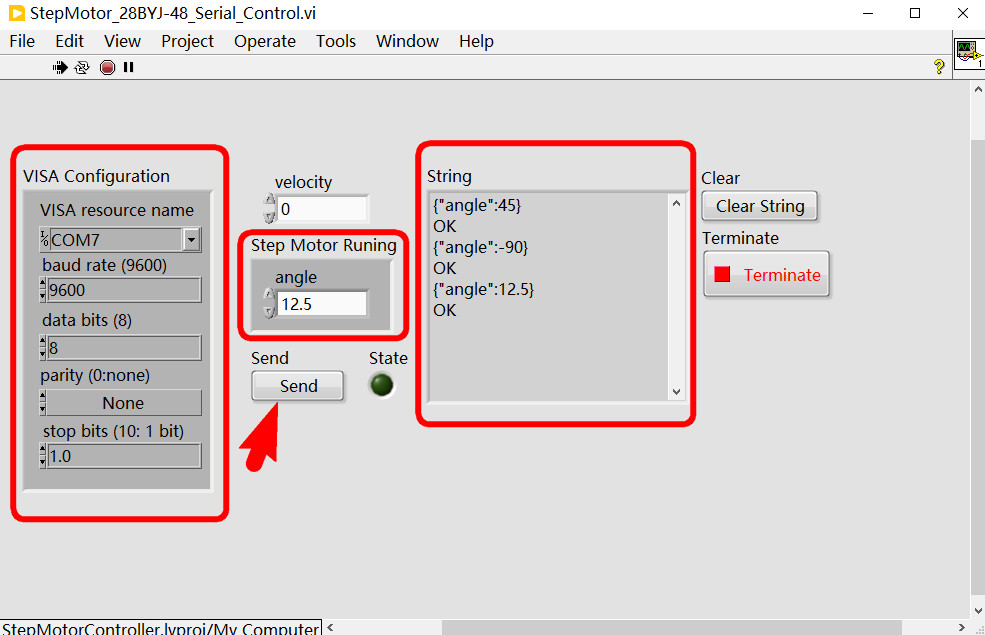
步進(jìn)電機(jī)的 LabVIEW 控制與應(yīng)用

LabVIEW運(yùn)動(dòng)控制(四):EtherCAT運(yùn)動(dòng)控制器的周期上報(bào)功能#正運(yùn)動(dòng)技術(shù) #LabVIEW
LabVIEW運(yùn)動(dòng)控制(三):EtherCAT運(yùn)動(dòng)控制器的高效加工指令自定義封裝
LabVIEW運(yùn)動(dòng)控制(二):EtherCAT運(yùn)動(dòng)控制器的多軸示教加工應(yīng)用(下)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論