 繩索攀登機器人的制作
繩索攀登機器人的制作

第1步:靈感,原型和設計
建造一個爬繩機器人是我小時候的一個想法,靈感來自我童年最喜歡的一個節目:巫師。可能你從來沒有聽說過它。你看,在一個典型的“垃圾寶藏”的例子中,幾個在美國不受歡迎的節目(并且僅在一個季節后被取消)成為拉丁美洲的邪教經典,完整世代將它們作為參考點。所以對于我們很多人來說,“街頭鷹”,“Manimal”和“Automan”都像“The Fall Guy”,“The A-Team”和“MacGyver”一樣酷。
人們說Tyrion Lannister是第一次將侏儒癥的人視為電視劇中的主角(沒有任何反對Peter Dinklage,他是我們這個時代最優秀的演員之一),但這歸功于Simon McKay(David Rappaport)。他太棒了!機器人技術的天才曾經為政府制造武器,然后他退出并成為最好的玩具制造商,慈善家和冒險家。每當他和他的朋友遇到麻煩時,他的行李箱里都有一些特殊的玩具可以讓他們逃脫。也許他的第一個給我留下深刻印象的玩具是他在工作室里的一個爬繩機器人。有好幾次我試著制作像那樣的玩具,但我失敗了。但是在遇到這個3D筆問題后,我決定再次嘗試這個想法。
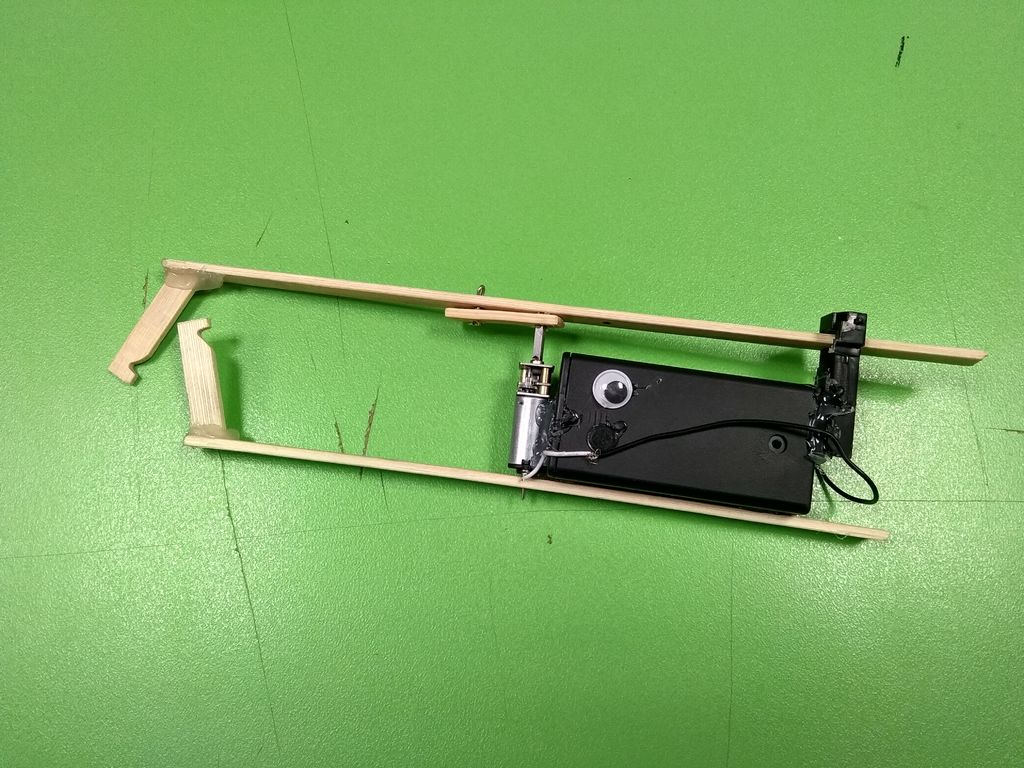
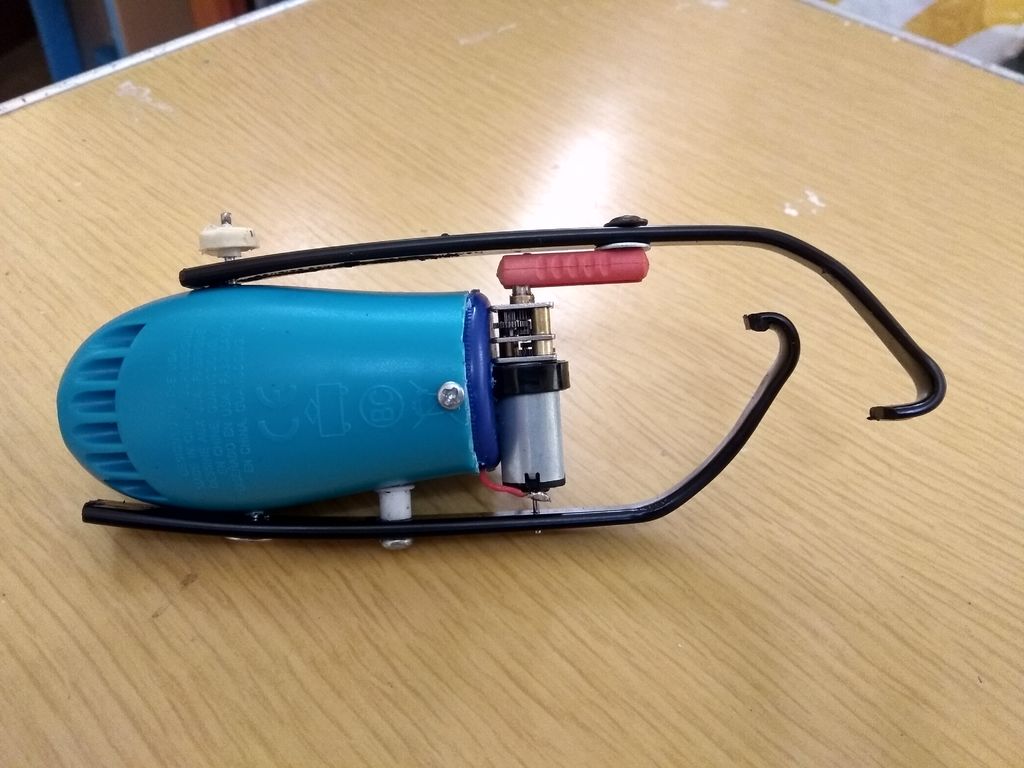
首先,我需要測試3D筆的變速箱是否足夠強大以提升機器人的重量,所以我創造了使用電機,電池座和竹烤肉棒的原型,全部用熱膠粘住。當我看到它工作時,我感到很驚訝!。..幾分鐘。在那之后,熱膠不足以承受壓力,原型纏結并倒在地上。但是在短時間內工作,它給了我建立一個更好的機器人的基本信息!
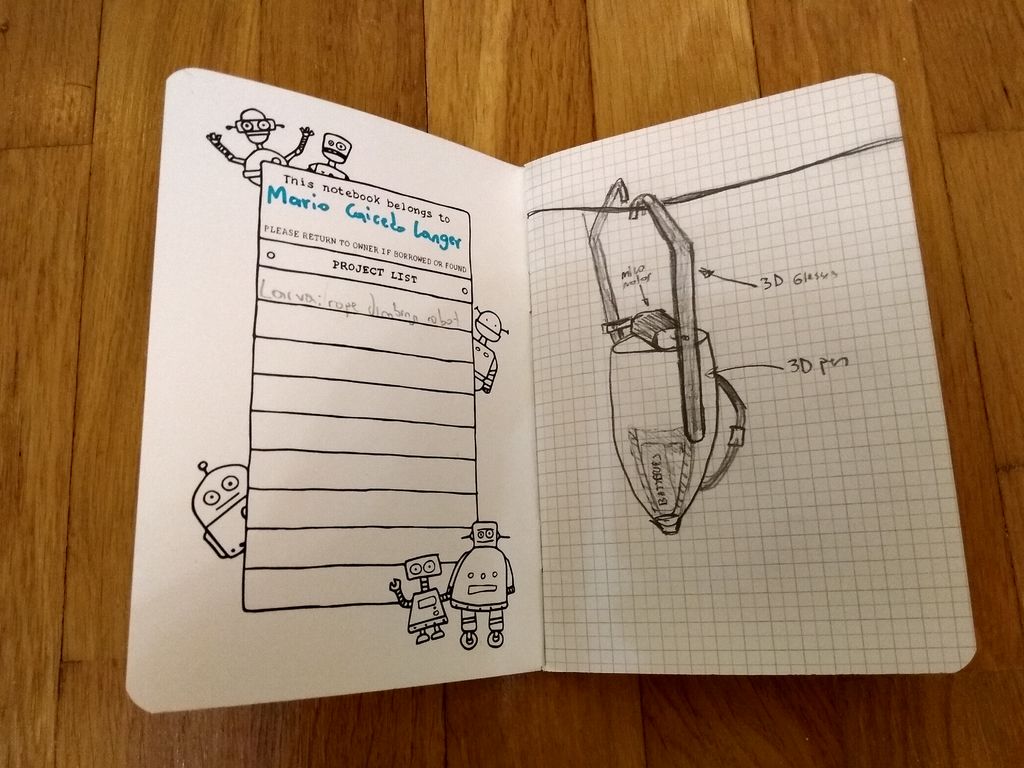
下一步(這是你在我的教程中經常看不到的東西),我畫了一個設計。用筆。如果我想讓它工作,我需要用它來完成工程設計過程。
第2步:材料


因此,要構建此項目的Mark II,您需要以下材料。所有或幾乎所有這些都是可回收的,只要您有帶變速箱的電機,您就可以使用替代品。你需要:
1個破損的可充電3D筆
1個3D眼鏡(或任何一種帶有厚塑料框架的眼鏡)
1個塑料瓶蓋
1個小開關(可以從破損的玩具中回收,甚至可以從3D筆板上回收)
1個拉鏈
1廢棄的陶瓷歐式汽車保險絲(或任何其他可用作曲柄的硬塑料小件)
電線(紅色和黑色,最好)
螺絲,螺母,螺栓,墊圈
Superglue
焊錫
此外,您還需要以下工具:
Dremel旋轉工具
熱風槍
烙鐵
螺絲刀
鉗子
步驟3:打開3D筆



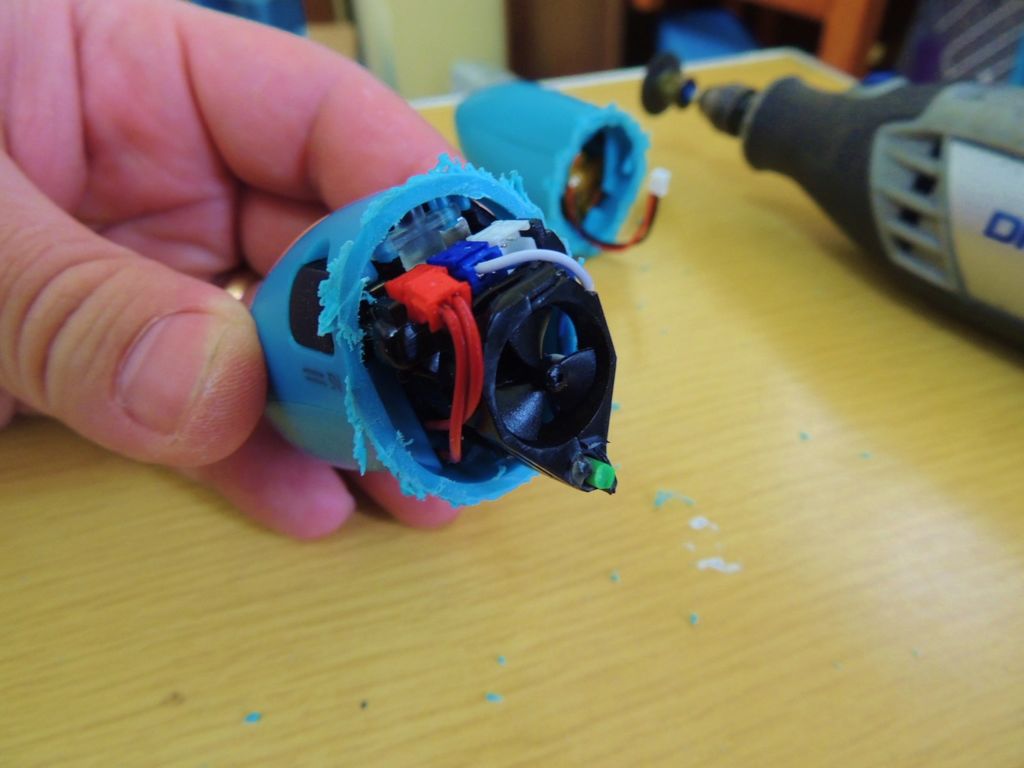
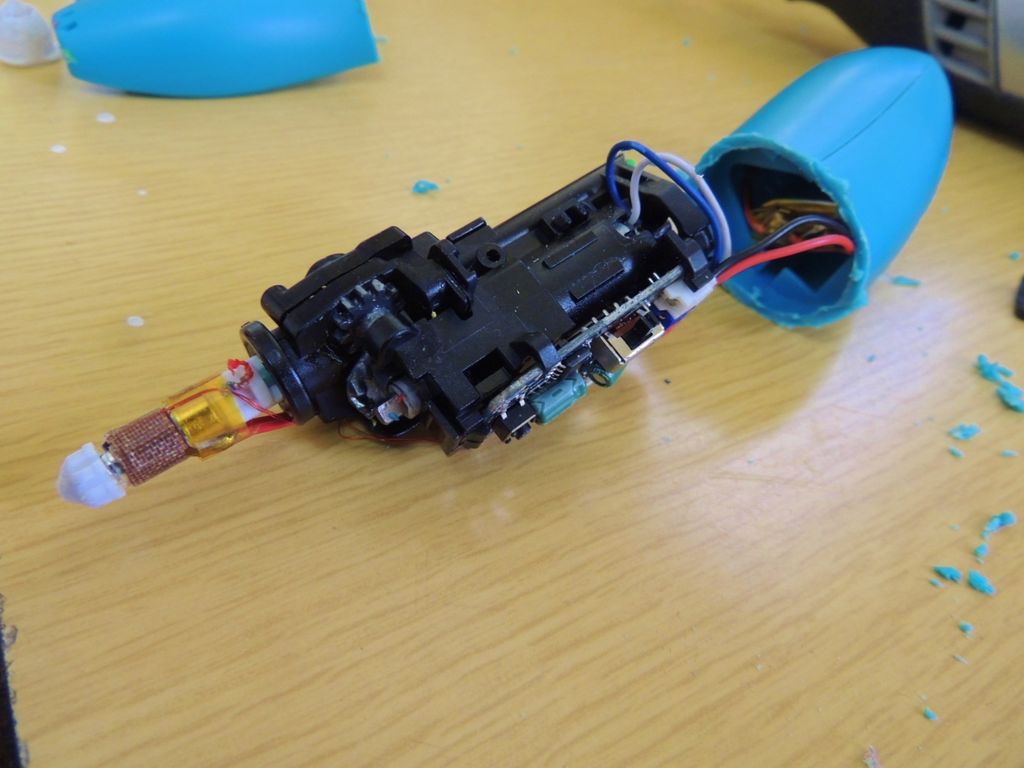
使用旋轉工具,小心地從中間(最纖薄的部分)切割3D筆的外殼。但只有塑料部分!如果切割太多,可能會損壞可能對此項目或未來項目有用的電路板或其他組件。
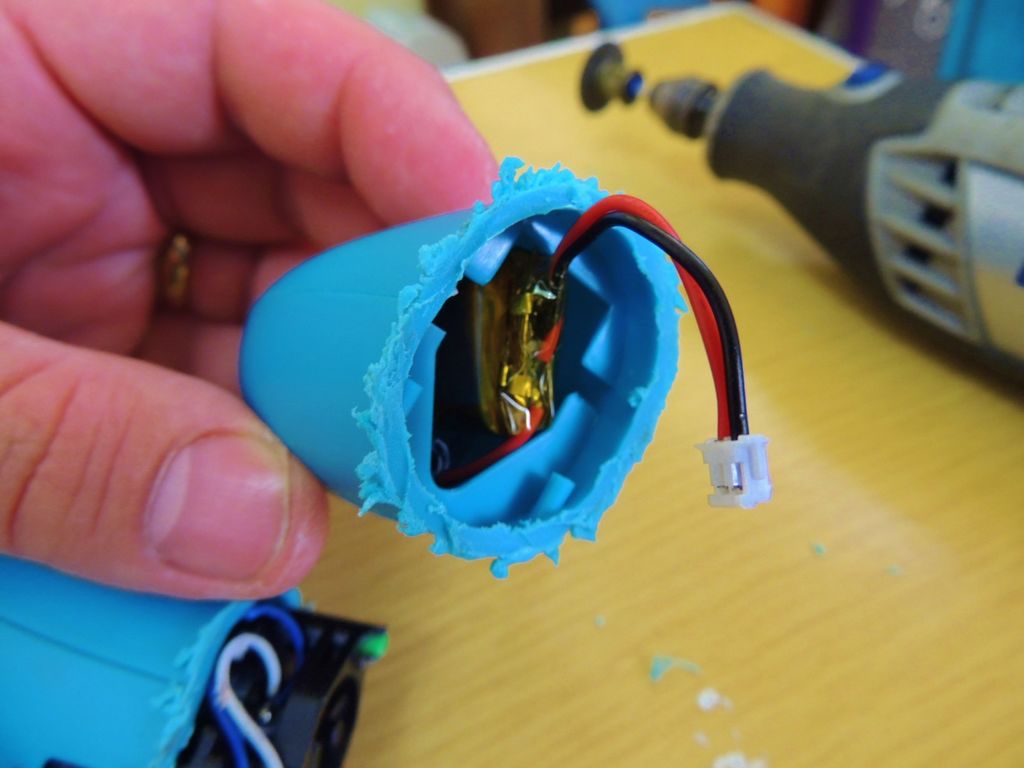
我們將用于機器人身體的部分案例是電池的放置位置。小心地將它們與電路板的其余部分斷開。
步驟4:挖掘必要的組件

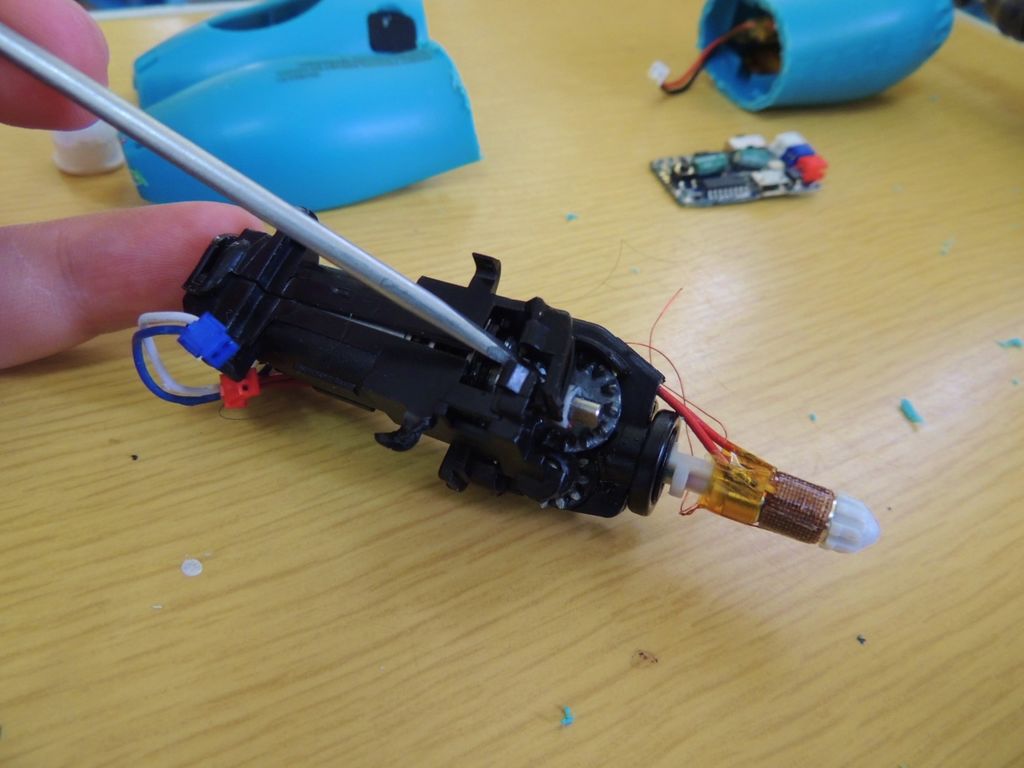


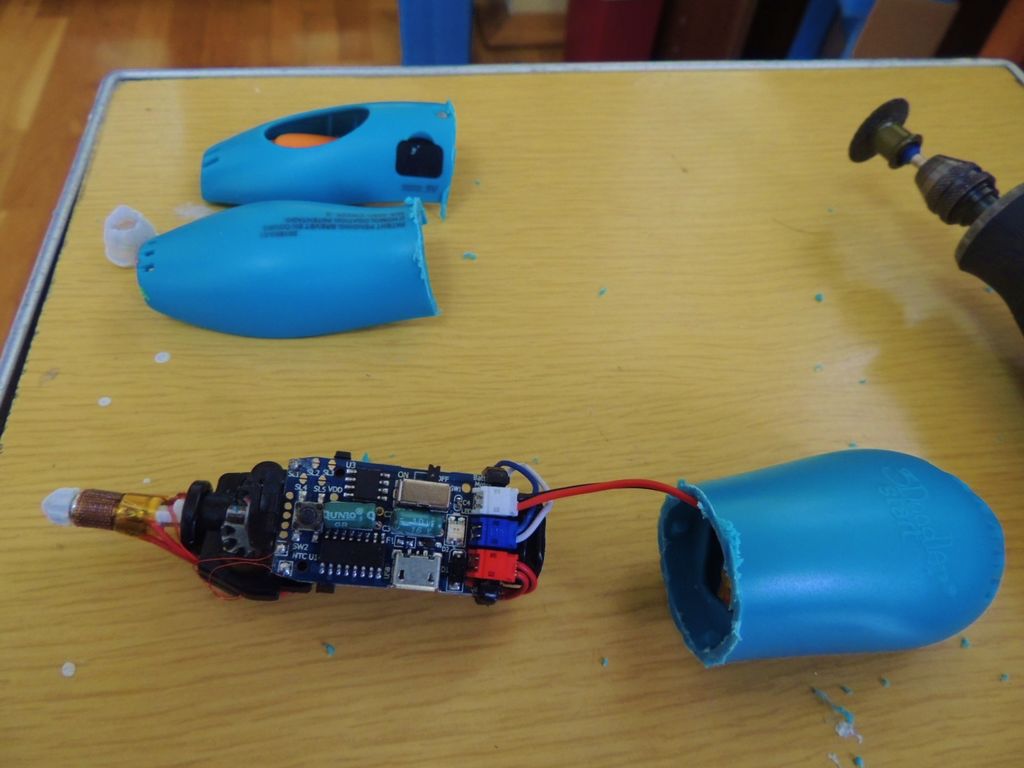
使用平頭螺絲刀和小鉗子,打開包含機械和電子部件的黑色外殼。基本上,您需要以下組件來創建機器人:
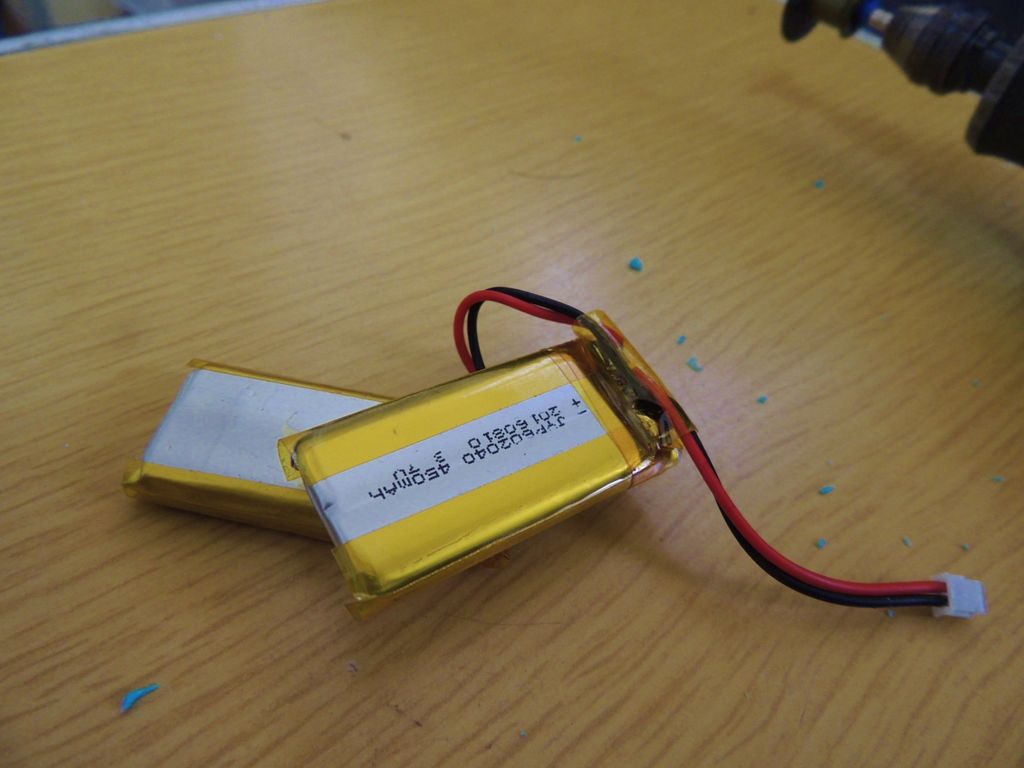
內置電池的情況:它將成為主體和電源。
電路板:它將轉變為獨立的電池充電器。
帶齒輪箱的電機:它將移動機器人的手臂。
步驟5:電路的修改Board



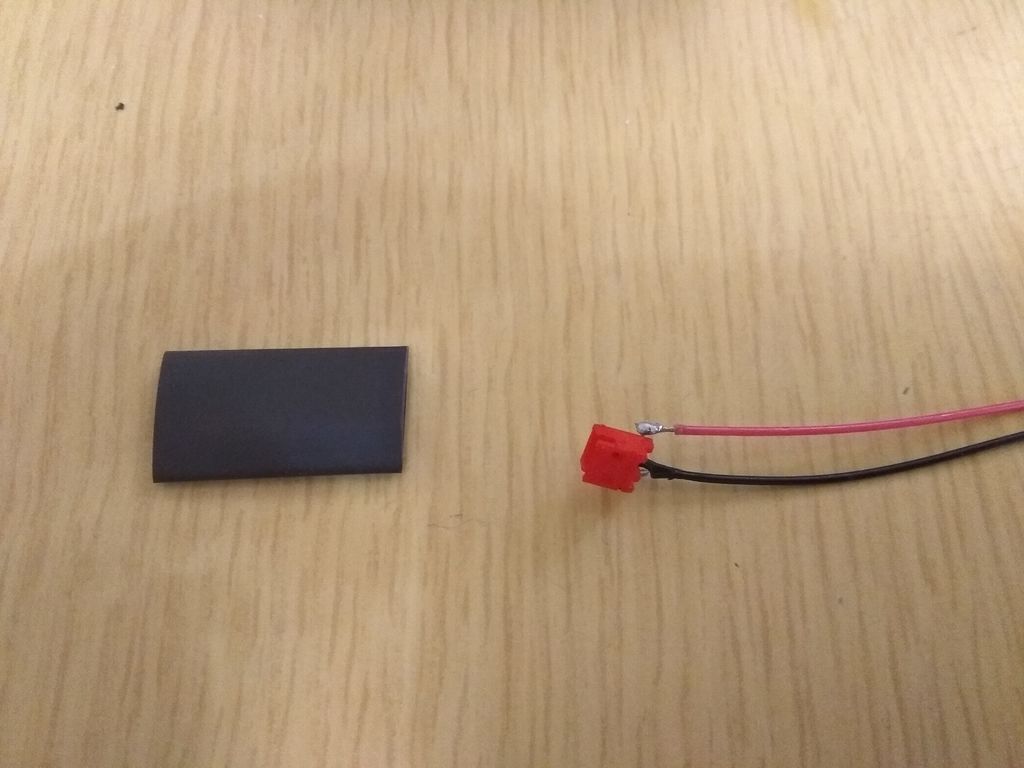
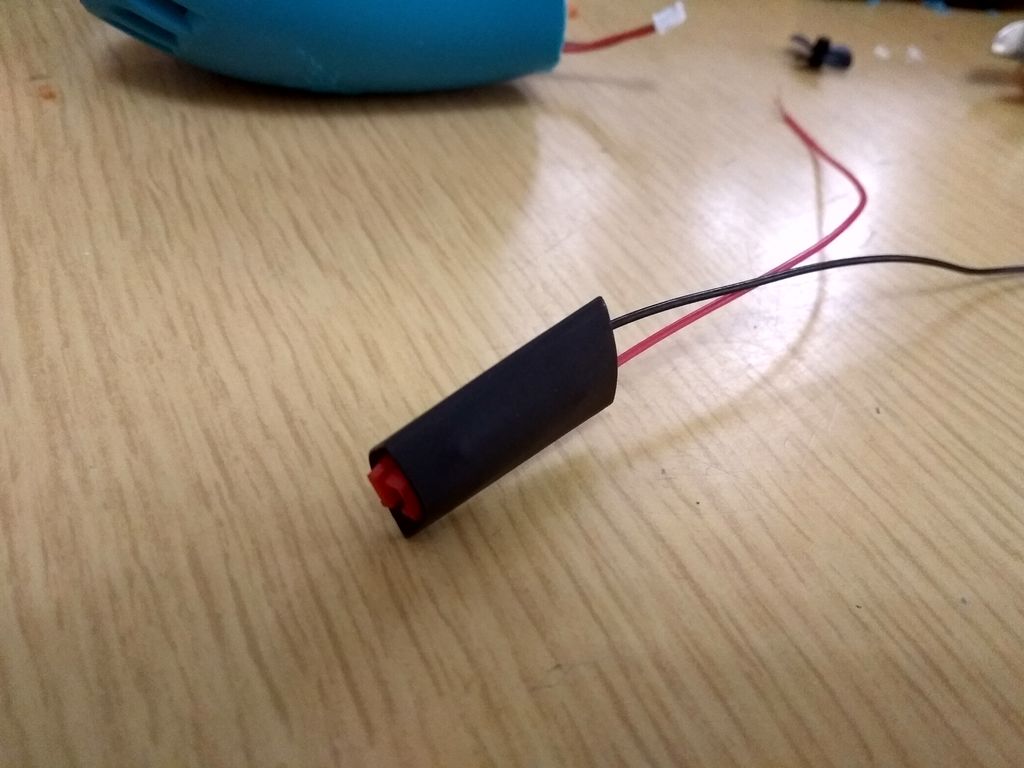

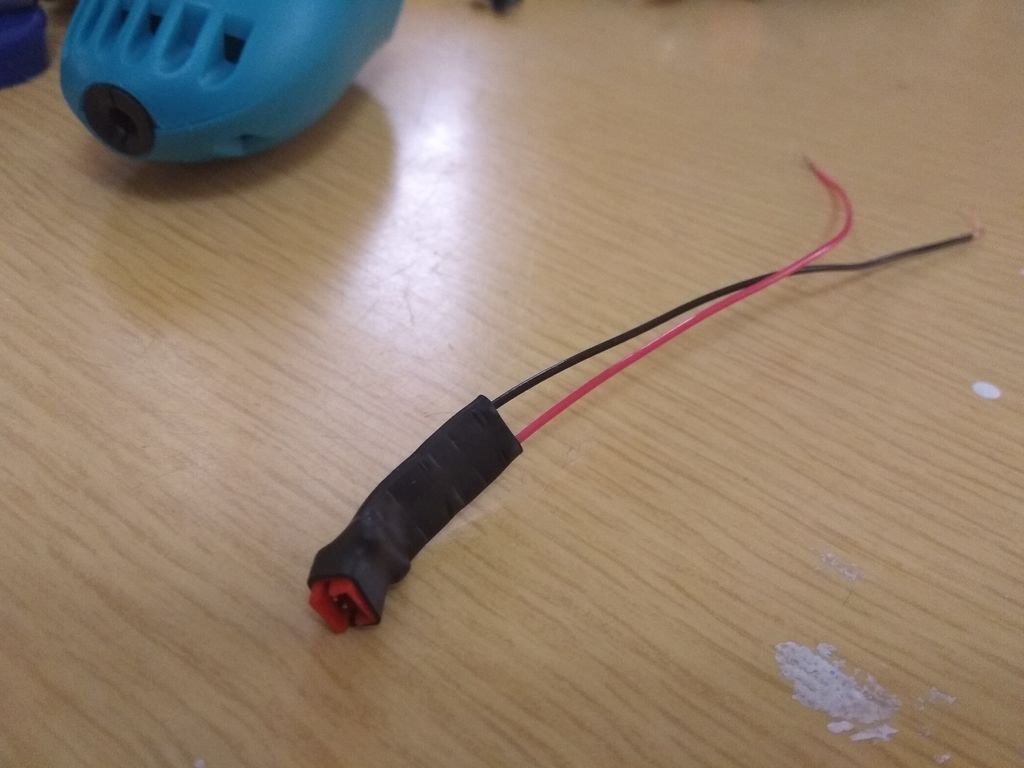
要為此機器人充電,必須從電機上拔下電池并連接到充電器。這意味著我們需要兩個與電池插頭兼容的迷你插座:一個在電路板/充電器中,另一個用于電機。你可以買一個新的。或者,您可以使用另外兩個中的一個焊接到電路板上。
使用烙鐵,取下紅色迷你插座,并將電線焊接到每個引腳。我們將使用這個用于電機(后來,我也刪除了藍色的,用于另一個項目。)
最后,在插座上放置一些熱縮管并將其暴露在熱風槍,所以引腳受到保護。
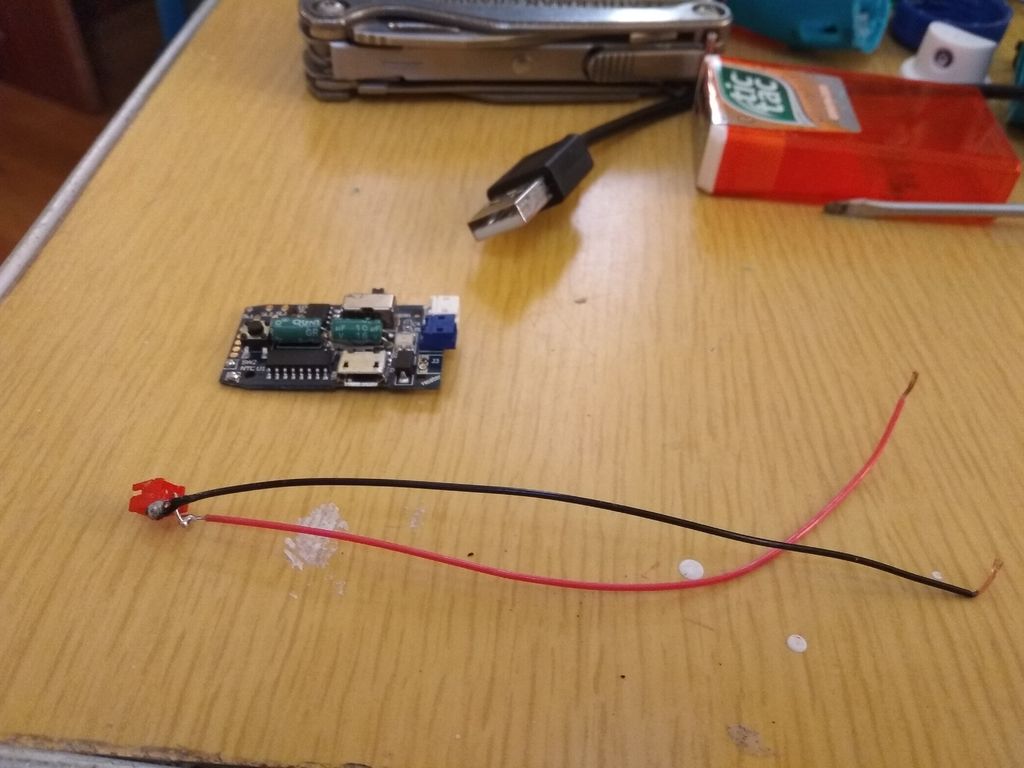
步驟6:構建電池充電器


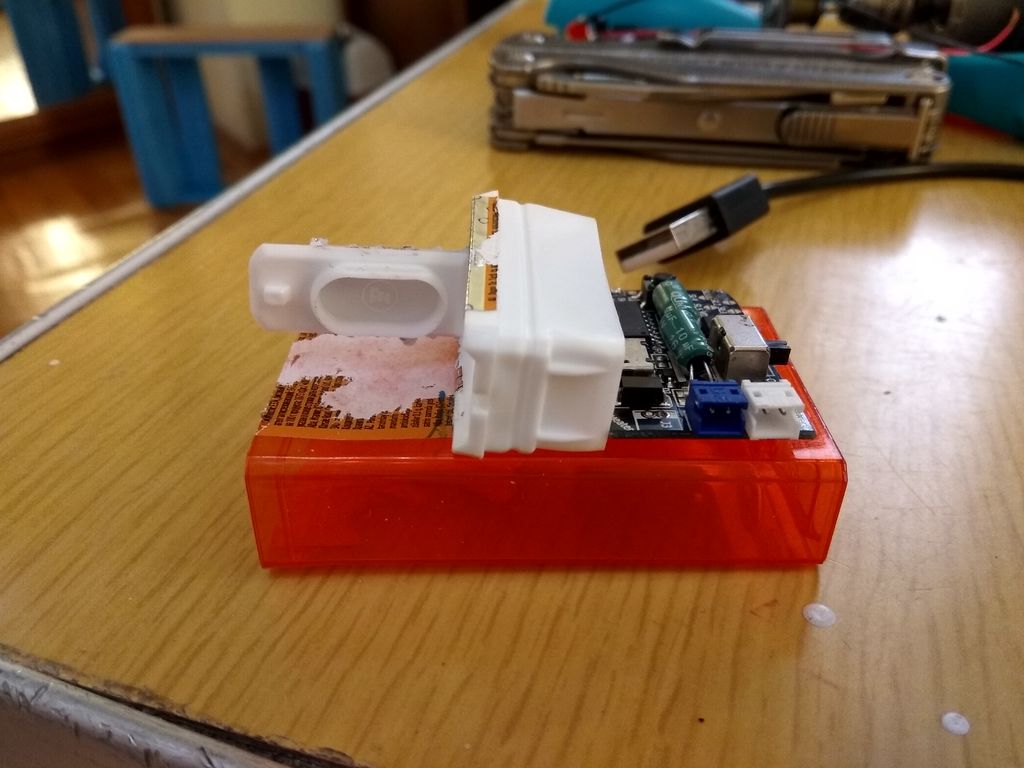

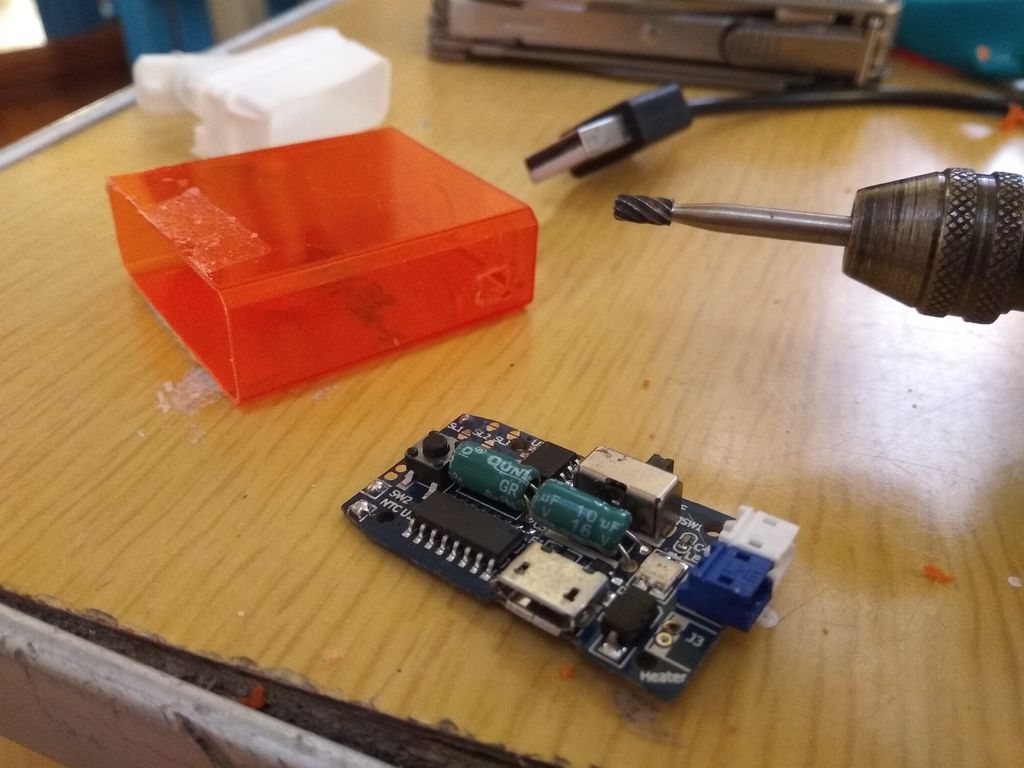


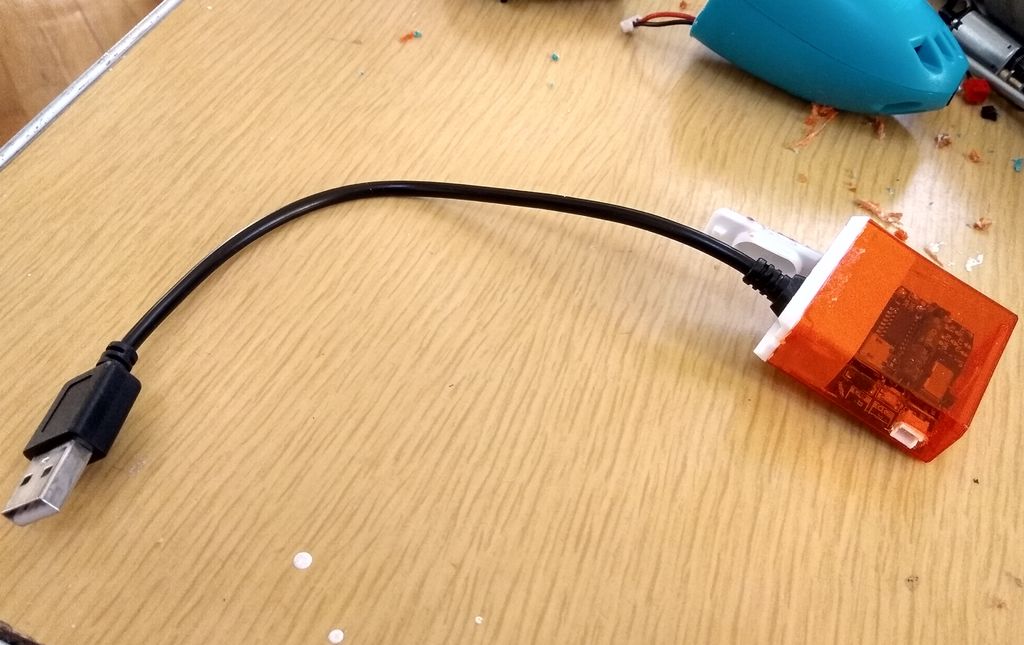
對于這部分,您將需要修改后的電路板, 3D筆和Tic Tac盒附帶的USB線。
修改Tic Tac盒,以便您可以將板安裝在里面。使用Dremel旋轉工具。在插入電路板之前,請檢查開關是否處于關閉狀態(充電位置)。
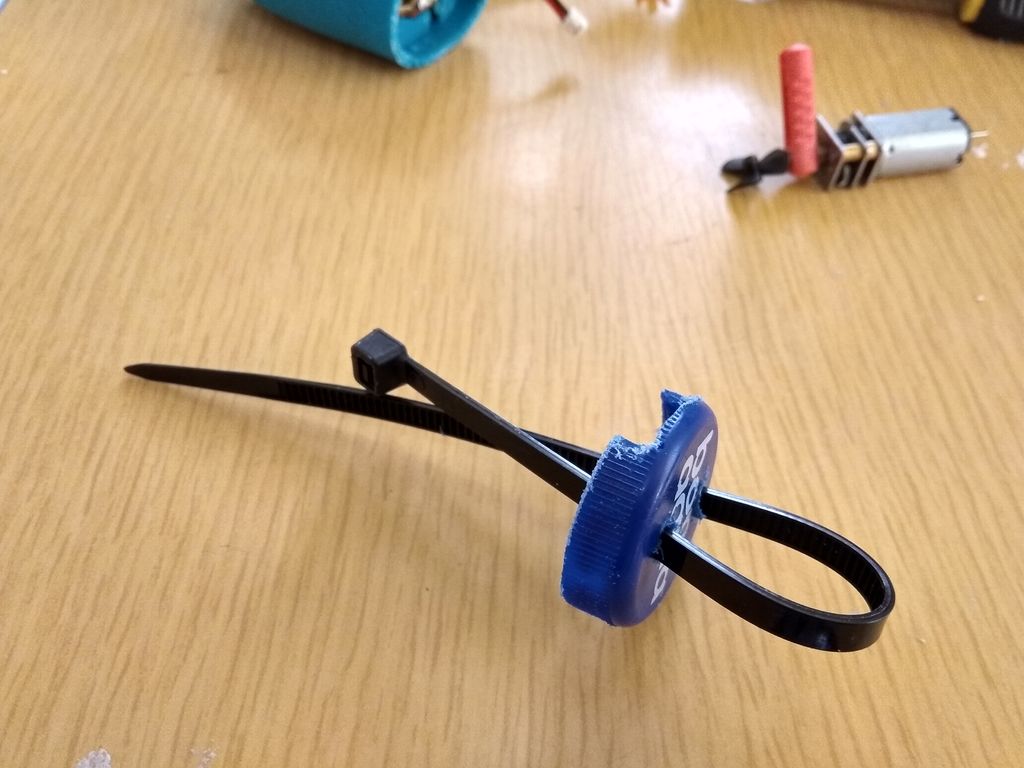
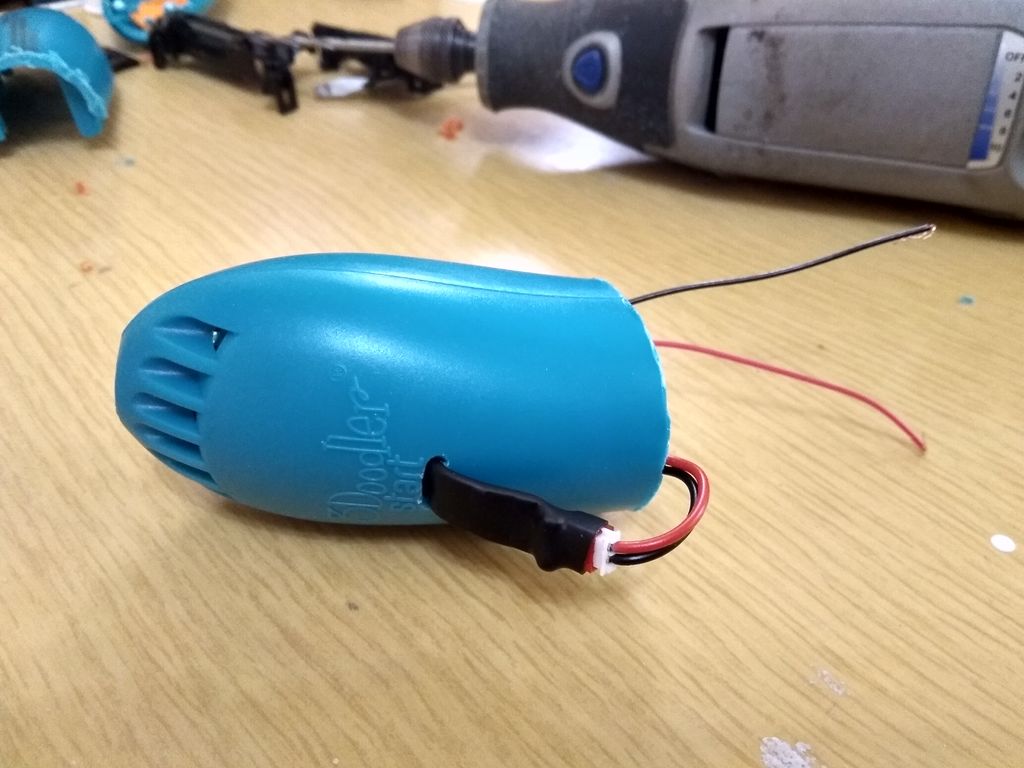
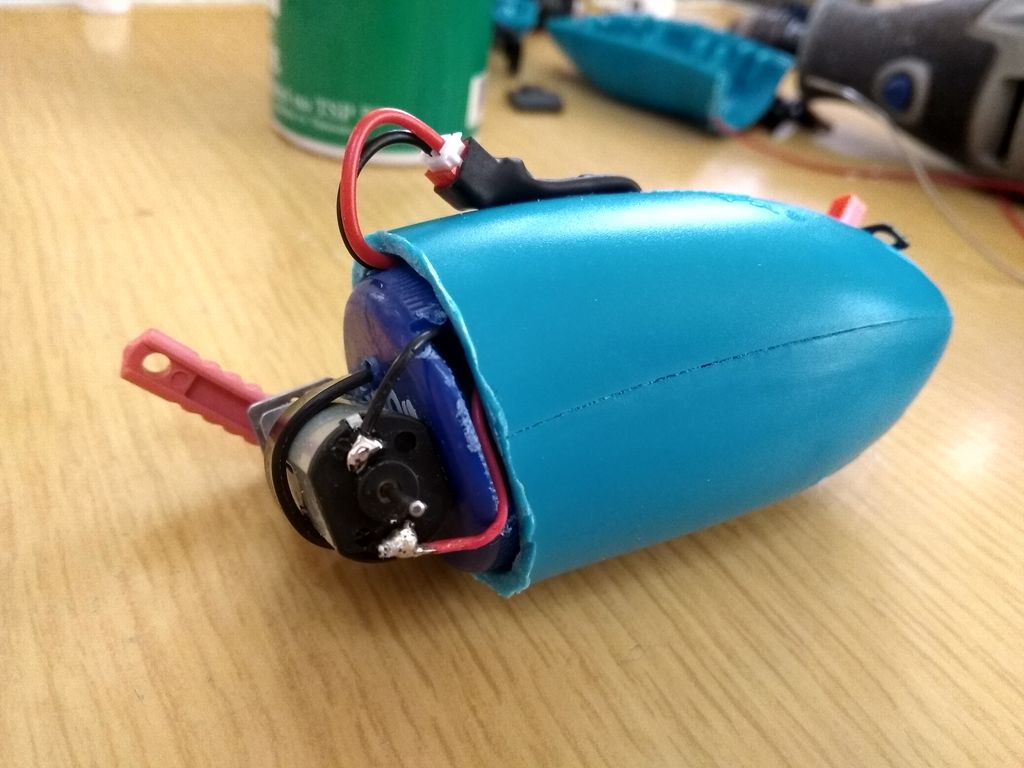
第7步:機器人的身體






使用Dremel,調整塑料蓋以覆蓋電池盒中的孔。這個蓋子非常重要,因為電機會連接到它上面。此外,電池和電機的電纜將從側面通過。
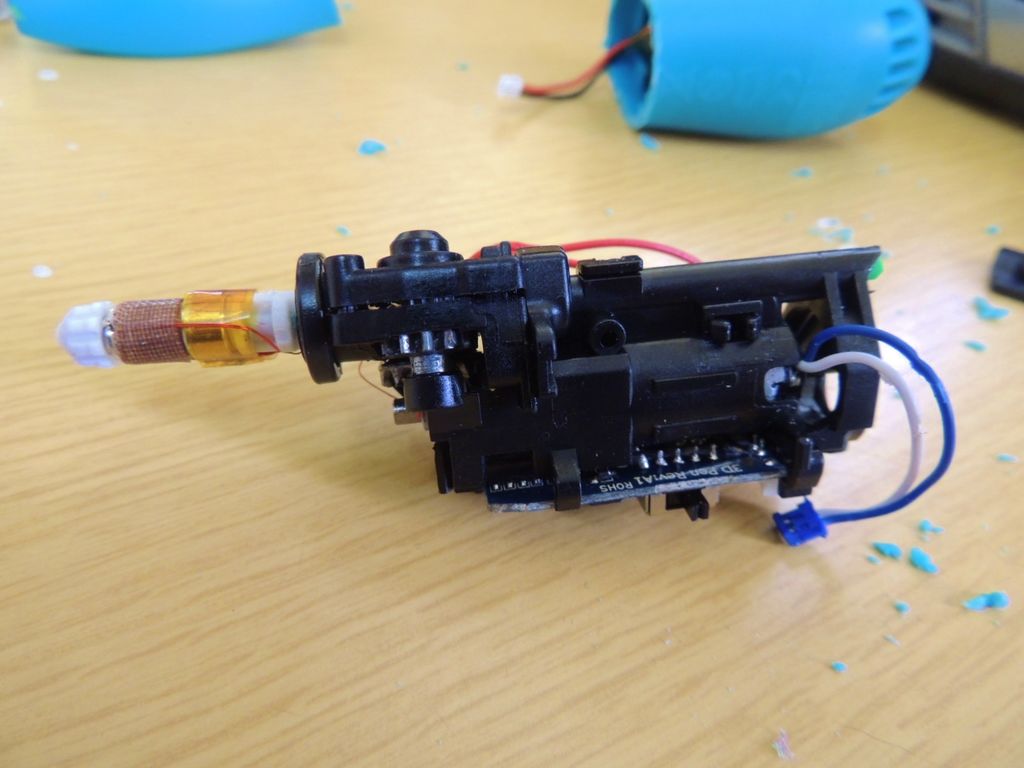
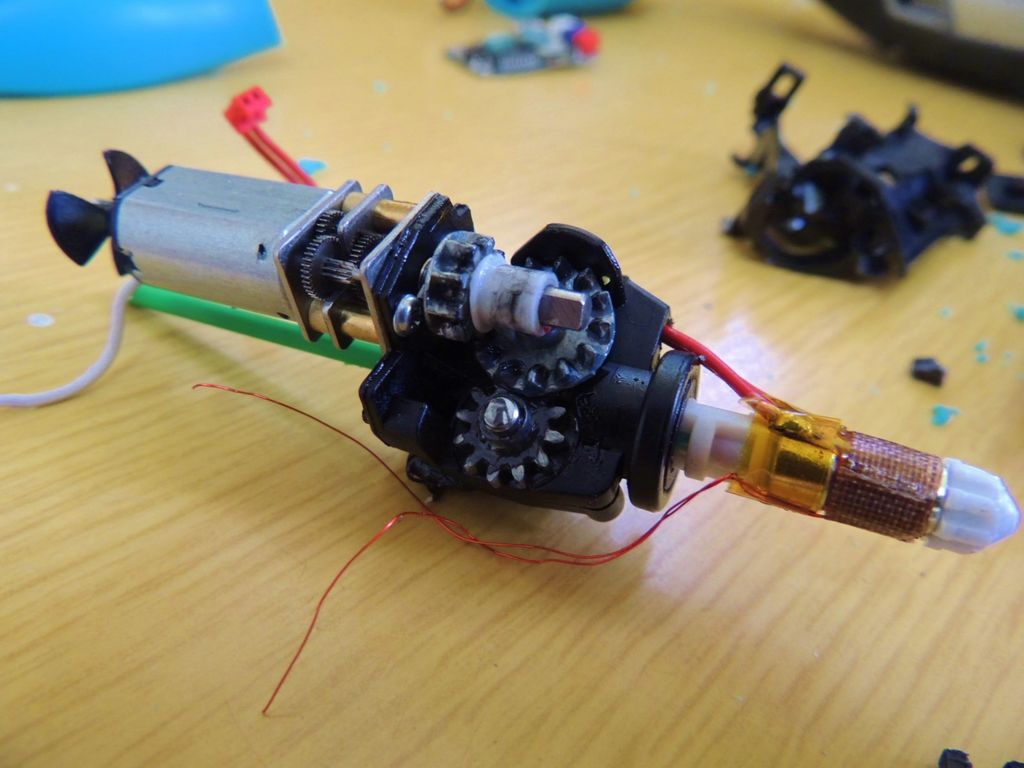
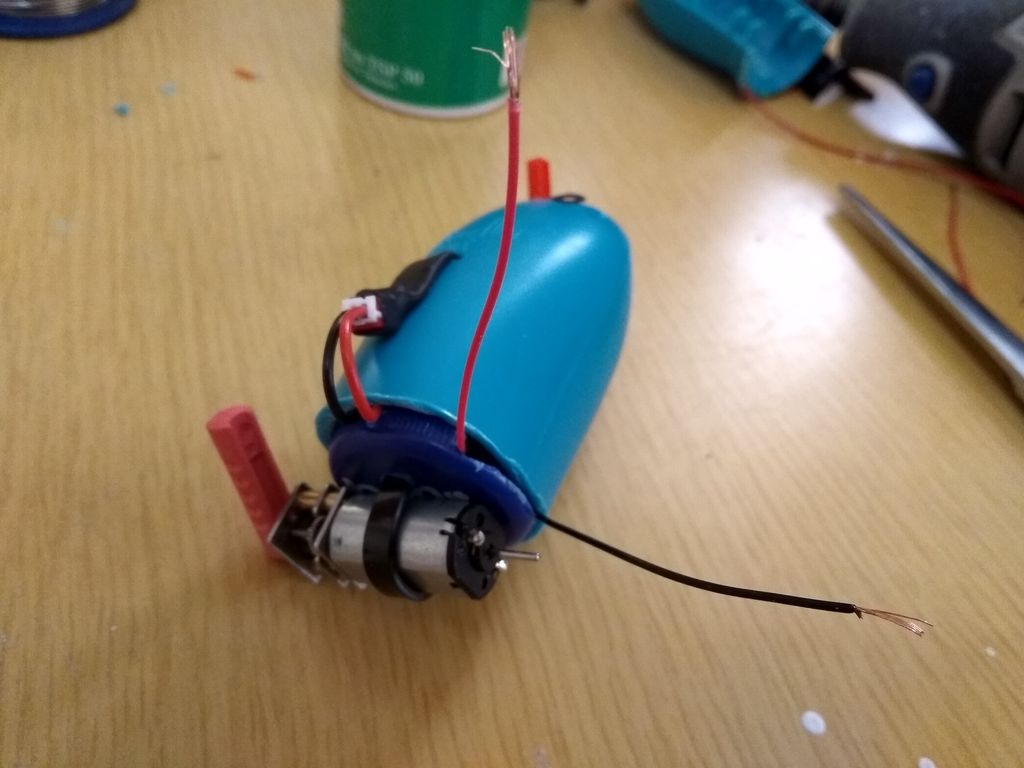
步驟8:添加曲柄并連接電機






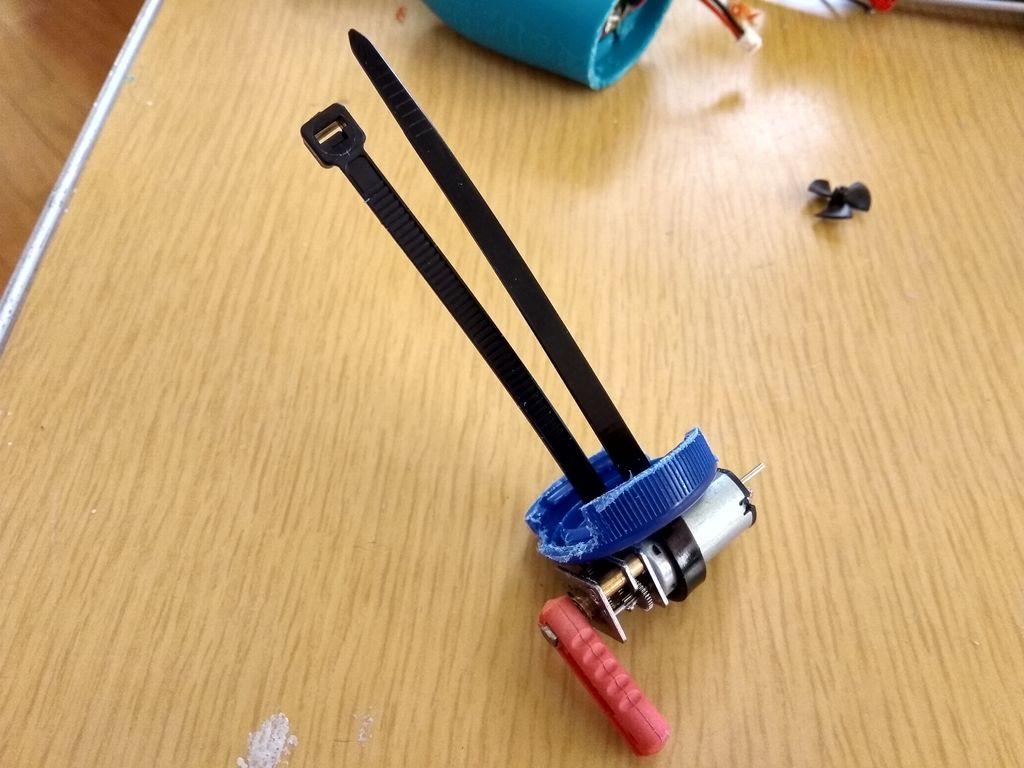
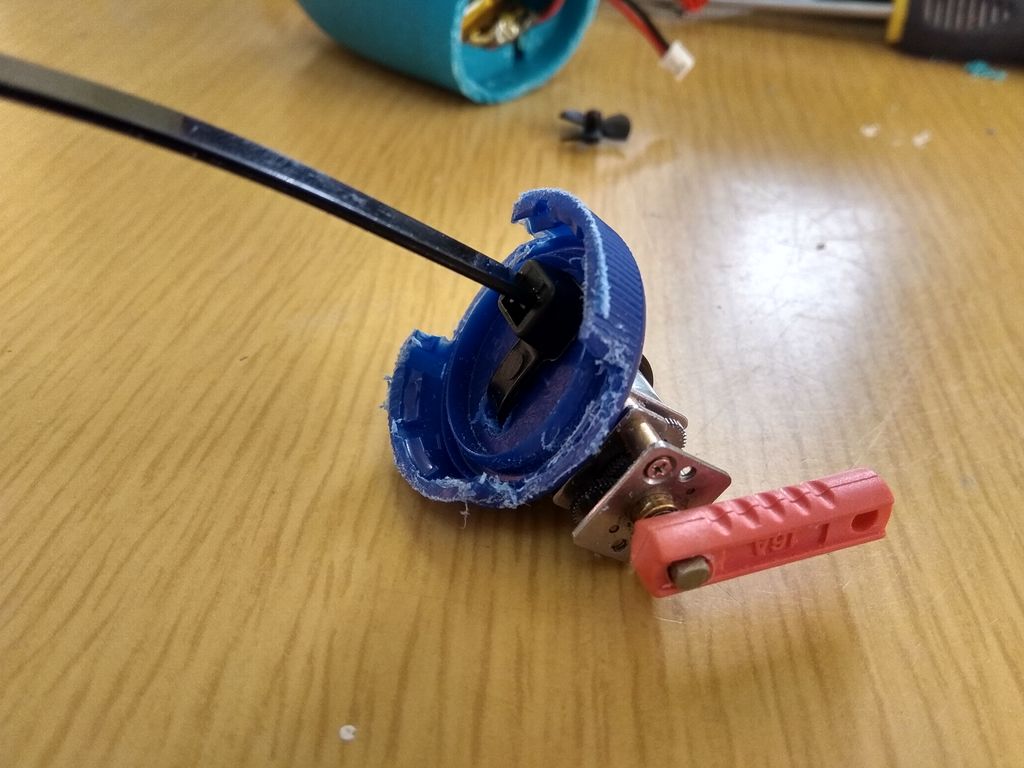




從電機軸上取下額外的附件。此外,您可能需要從軸上切下一段,因此它與曲柄的長度相同。
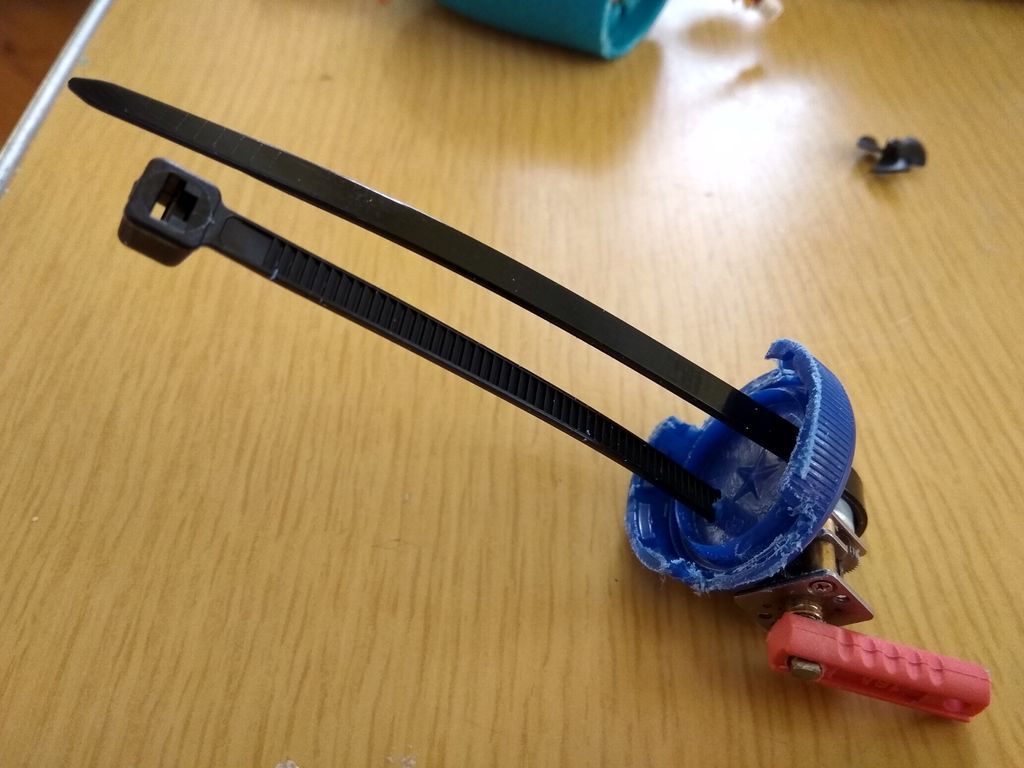
作為曲柄,我們將使用保險絲。檢查它是否適合并適應Dremel或必要時添加一滴超級膠水(小心!不要堵塞齒輪箱。)
然后,使用拉鏈將電機連接到瓶蓋上。然后,將瓶蓋放入閥體并檢查電機軸是否與殼體的裂縫對齊。
步驟9:電路



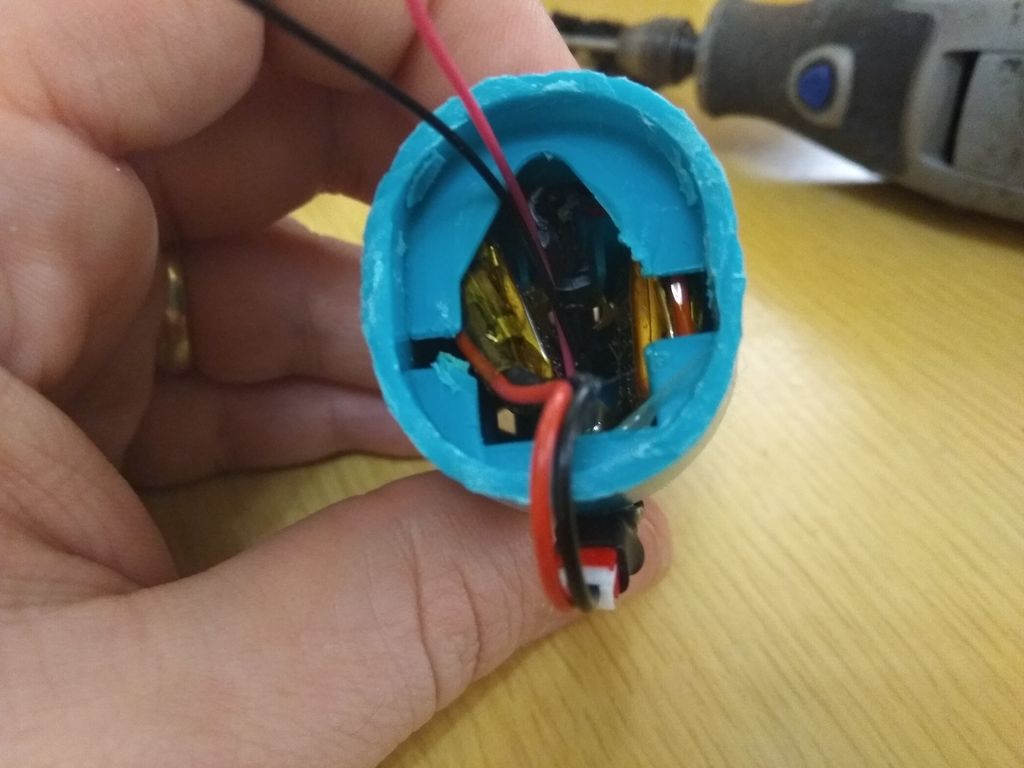


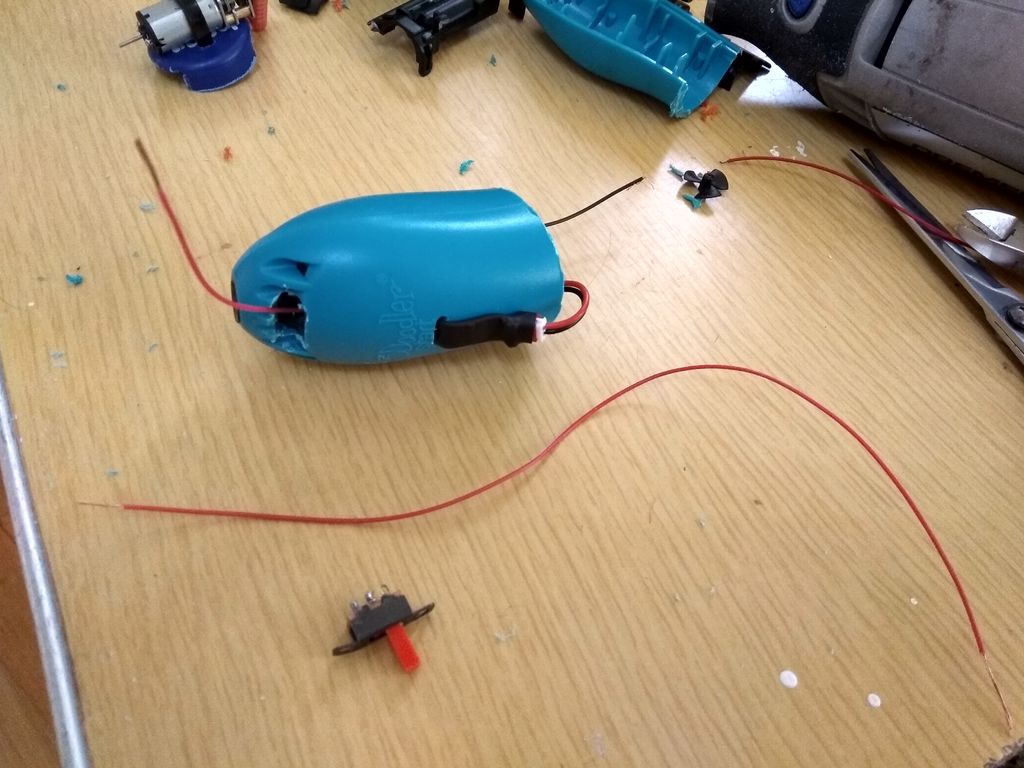

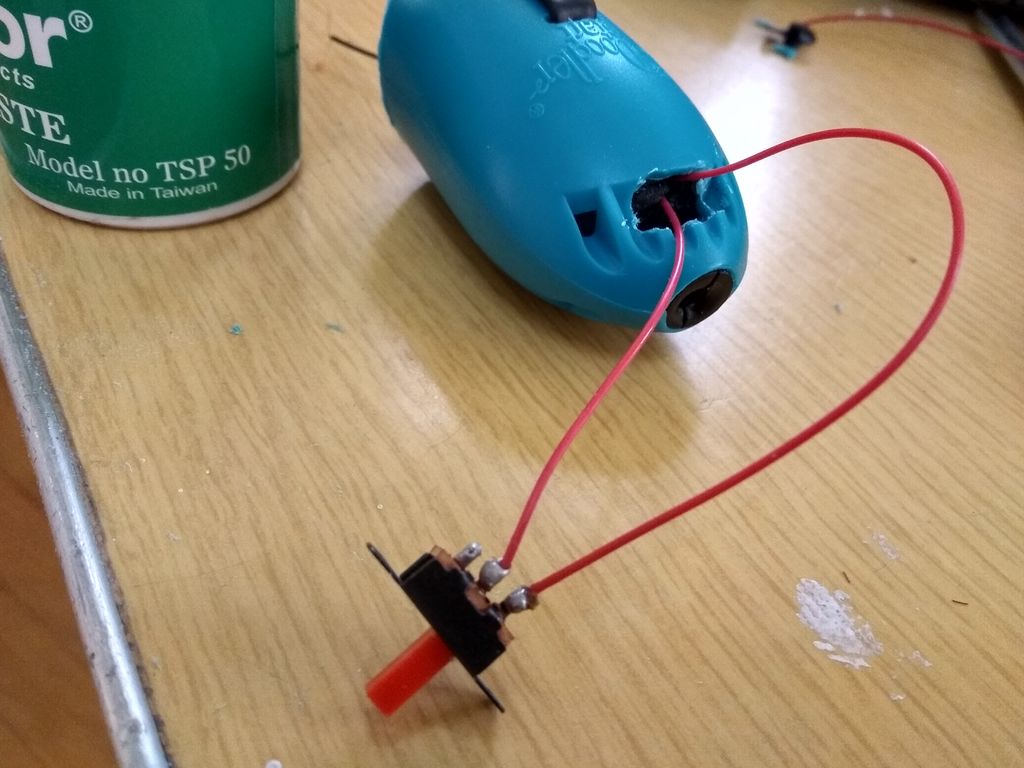



此機器人使用基本電路。但是,您需要對塑料外殼進行一些額外的修改。使用Dremel,在背面(對于步驟5的迷你插座和電纜)和底部(放置開關)打開一個孔。
將迷你插座連接到電池,然后將它插入孔中。一根電纜將連接到電機的一個引腳。另一個,到交換機的一個引腳。然后將額外的電纜從交換機的中心引腳連接到電機的另一個引腳,試圖將所有電纜保持在外殼內(只有外露的電纜是電池的插頭和插座。)
在每個連接處使用烙鐵和焊接薄。
最后,將塑料蓋放在電機上,用小螺釘將其固定在外殼上。
步驟10:移動臂














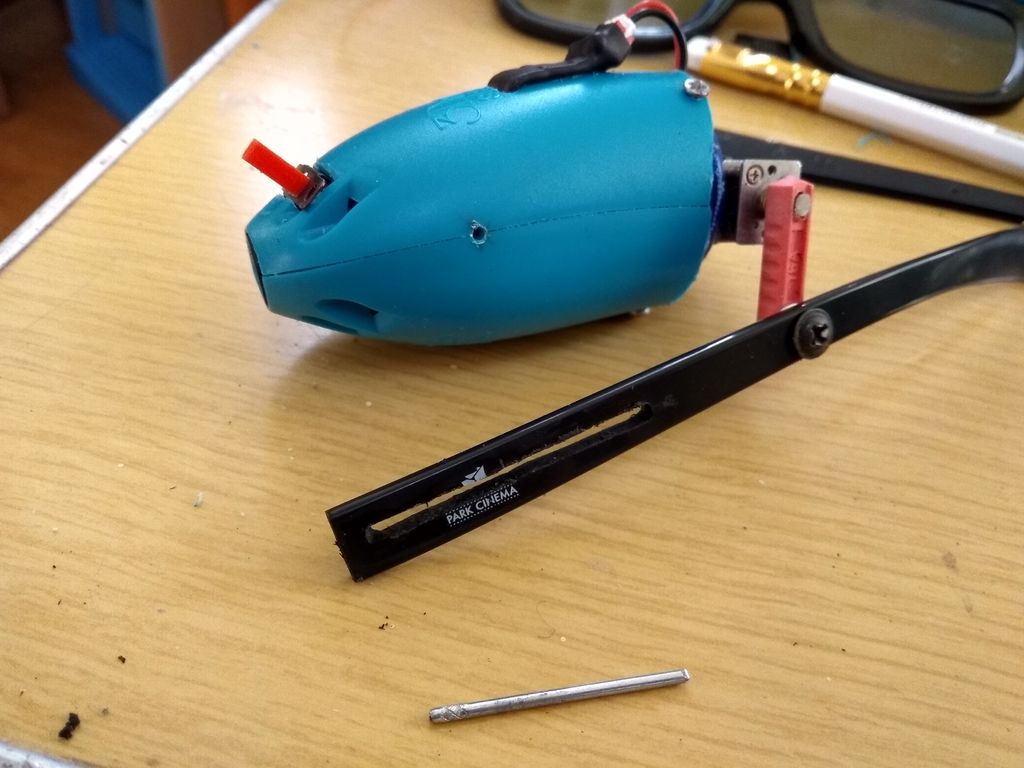


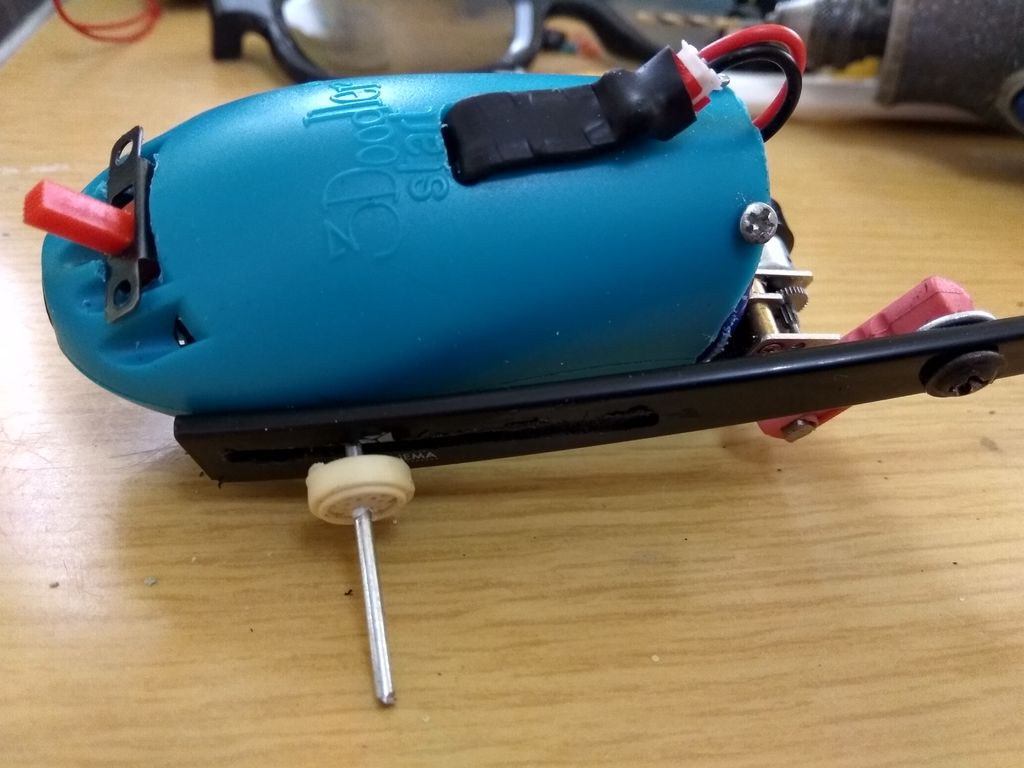

拿起3D眼鏡并取下腿。其中一條腿將是機器人的移動臂。鉆一個洞,在照片中顯示的點上畫一個凹槽。然后用螺絲和金屬墊圈將其固定在曲柄上。
在外殼上鉆一個小孔,小心不要刺破電池。從小玩具車上安裝金屬桿,并用強力膠粘合。然后,插入一個小車輪以保持移動臂就位。
步驟11:靜態臂
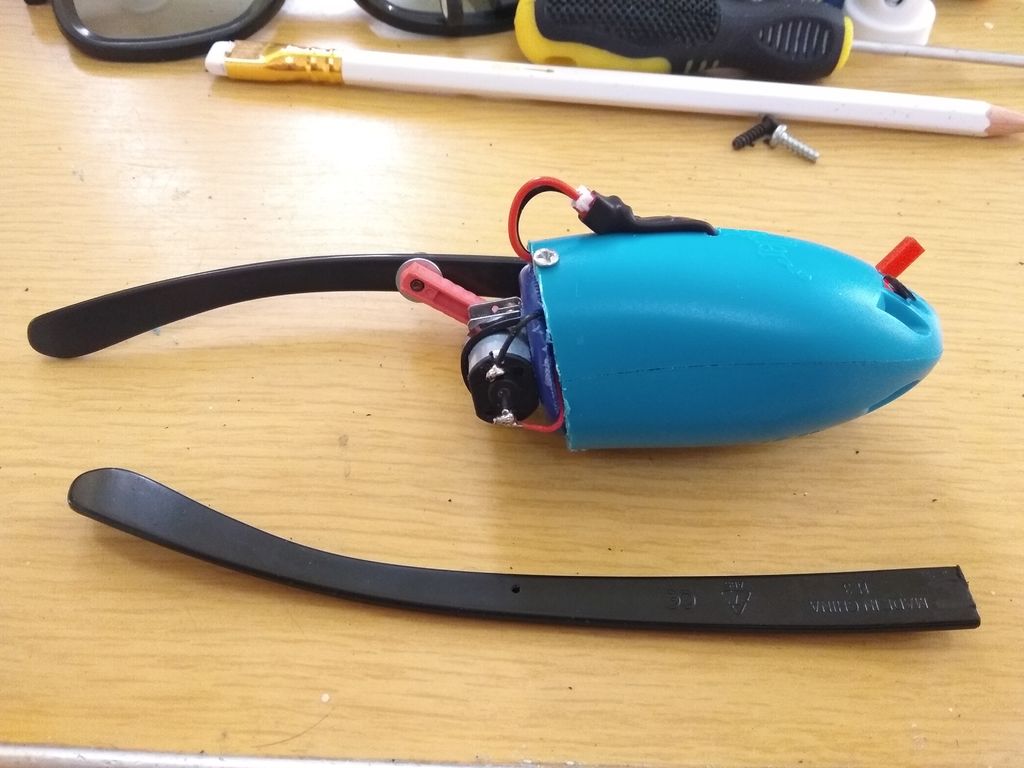




另一只手臂將固定在身體上。在移動臂的相同位置鉆一個孔,然后在電機軸的另一端(沒有變速箱的那個)將它串起來。將手臂的其余部分連接到身體上,再次注意不要刺穿電池。
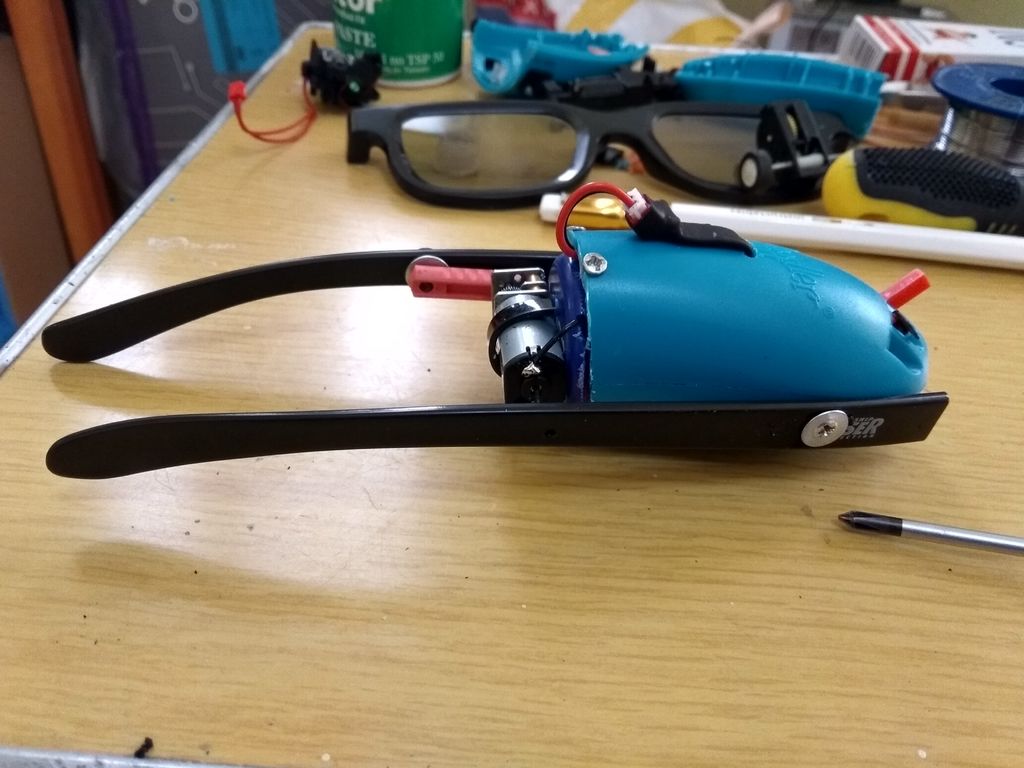
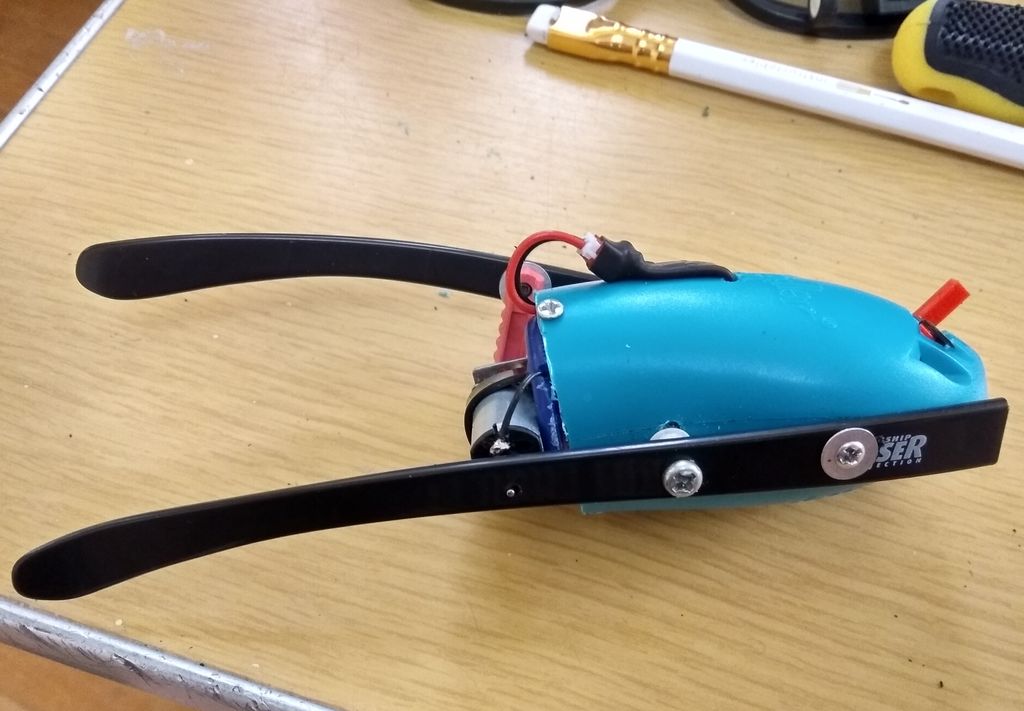
步驟12:手臂掛鉤





使用熱風槍,模制手臂以形成鉤形,小心不融化機器人的任何其他部分。檢查在運動過程中,兩臂可以自由移動而不會相互接觸。此外,鉤子必須相互通過,因此它們都可以毫無困難地抓住繩子。
-
機器人
+關注
關注
213文章
31092瀏覽量
222347
發布評論請先 登錄
再談低溫燒結銀的應用:從春晚四家機器人出鏡的幕后推手說起
探索RISC-V在機器人領域的潛力
繩子驅動的機器人,會是未來嗎?

RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
什么是機器人?追溯機器人技術的演變和未來

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
工業機器人的特點
工業機器人與協作機器人概念不同




 工商網監
工商網監
評論