") 逃生機(jī)器人的制作
逃生機(jī)器人的制作

步驟1:主要概念&動(dòng)機(jī)
正如引言中所解釋的,這個(gè)項(xiàng)目的主要概念是創(chuàng)建和構(gòu)建一個(gè)半自動(dòng)機(jī)器人,首先由逃脫游戲的玩家控制,然后能夠控制從球員那里回來(lái)。
原則如下:
想象一下你被鎖在一個(gè)房間里一群朋友。離開(kāi)房間的唯一可能性是找到一把鑰匙。鑰匙隱藏在腳下的迷宮中,位于黑暗的中間樓層。要獲得該密鑰,您擁有三件事:遙控器,地圖和屏幕。遙控器可以通過(guò)解決遙控器現(xiàn)有控制按鈕上想象的謎語(yǔ)來(lái)控制已經(jīng)在中間樓層的汽車。一旦你解決了這個(gè)謎題,汽車就會(huì)打開(kāi)(參見(jiàn)第5步:編碼 - 主要功能名為‘loop()’),你可以在給定地圖的幫助下開(kāi)始引導(dǎo)汽車穿過(guò)迷宮。由于固定在機(jī)器人前方的攝像頭,屏幕可以實(shí)時(shí)顯示汽車所看到的內(nèi)容,從而幫助您查看軌跡,更重要的是幫助您查看鑰匙。一旦你拿到了鑰匙,感謝機(jī)器人底部的磁鐵,一旦你到達(dá)了迷宮的盡頭,你就可以拿起鑰匙,逃離你被鎖的房間。
因此機(jī)器人的主要組成部分是:
要在遙控器上解決的謎語(yǔ)
玩家用遙控器控制機(jī)器人
基于攝像機(jī)實(shí)時(shí)拍攝視頻的控制顯示
因?yàn)樵谶@樣的游戲中主要的限制是時(shí)間(在大多數(shù)逃脫游戲中你有30分鐘到1小時(shí)才能成功),一個(gè)傳感器連接并連接在機(jī)器人的底部,這樣如果你作為玩家,超過(guò)給定的時(shí)間(在我們的情況下是30分鐘),機(jī)器人將控制權(quán)拿回來(lái)并自己完成parcours,這樣你在游戲計(jì)時(shí)器關(guān)閉之前有機(jī)會(huì)獲得房間的鑰匙(在我們的情況下是1小時(shí))
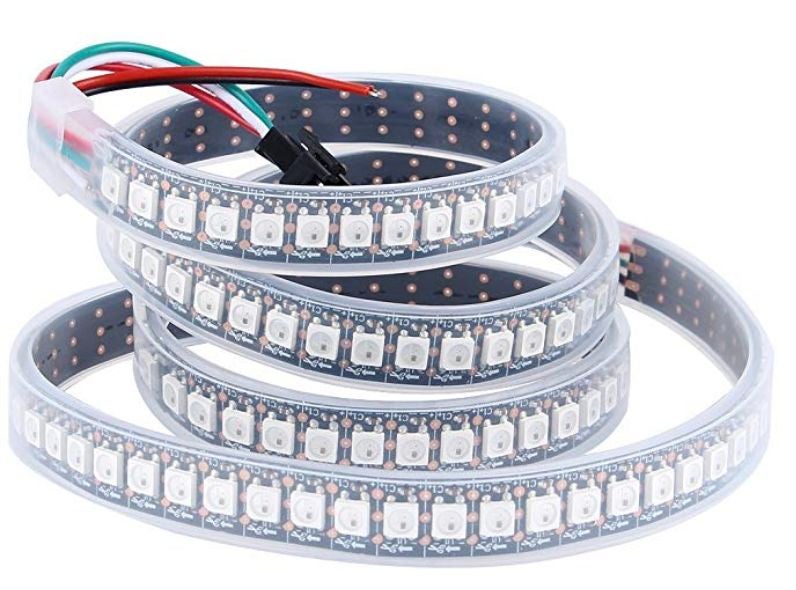
此外,由于汽車處于一個(gè)完全黑暗的房間,LED被固定在離傳感器不遠(yuǎn)的地方,以幫助它從地面讀取信號(hào)。
這個(gè)小組項(xiàng)目背后的愿望是我們自己的基礎(chǔ)關(guān)于市場(chǎng)上已有的東西,通過(guò)添加個(gè)人價(jià)值進(jìn)行修改,并能夠在一些有趣和互動(dòng)的領(lǐng)域中使用它。事實(shí)上,在與比利時(shí)布魯塞爾成功的Escape Room接觸后,我們發(fā)現(xiàn)逃脫游戲不僅越來(lái)越有名,而且他們經(jīng)常缺乏交互性而且客戶抱怨不夠“ “游戲。
因此,我們?cè)噲D想出一個(gè)符合既定要求的機(jī)器人,同時(shí)邀請(qǐng)玩家真正參與游戲。
以下是機(jī)器人中發(fā)生情況的摘要:
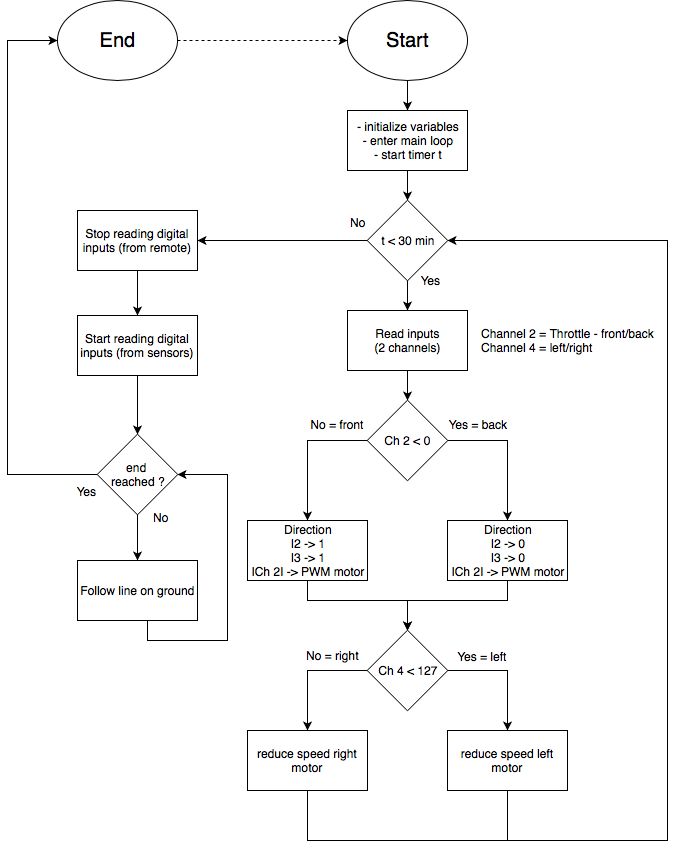
- 非自治部分:遙控器通過(guò)接收器鏈接到Arduino。玩家控制遙控器,因此控制控制電機(jī)的Arduino。 Arduino在游戲開(kāi)始前打開(kāi),但當(dāng)玩家解決遙控器上的謎語(yǔ)時(shí),它會(huì)進(jìn)入主要功能。 IR無(wú)線攝像頭已經(jīng)打開(kāi)(當(dāng)打開(kāi)/關(guān)閉時(shí),“整體”(由Arduino控制)同時(shí)打開(kāi))。玩家用遙控器引導(dǎo)汽車:他們控制速度和方向(參見(jiàn)第5步:流程圖)。當(dāng)輸入主功能時(shí)啟動(dòng)的計(jì)時(shí)器等于30分鐘時(shí),控制器的控制將被禁用。
- 自治部件:然后通過(guò)以下方式管理控件: Arduino。 30分鐘后,紅外線跟蹤器傳感器開(kāi)始跟隨地面上的一條線完成parcours。
步驟2:材料&工具




材料
電子零件
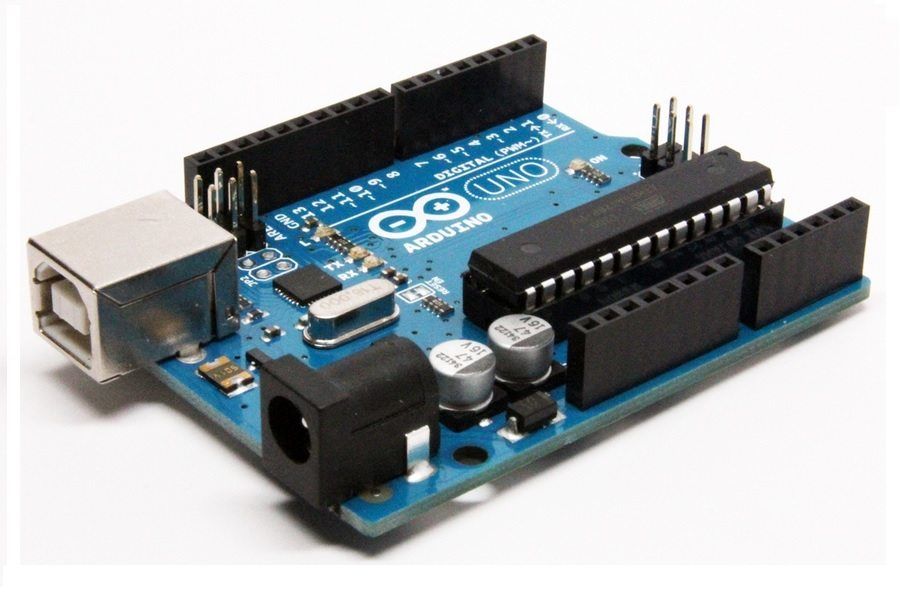
微控制器:
Arduino UNO
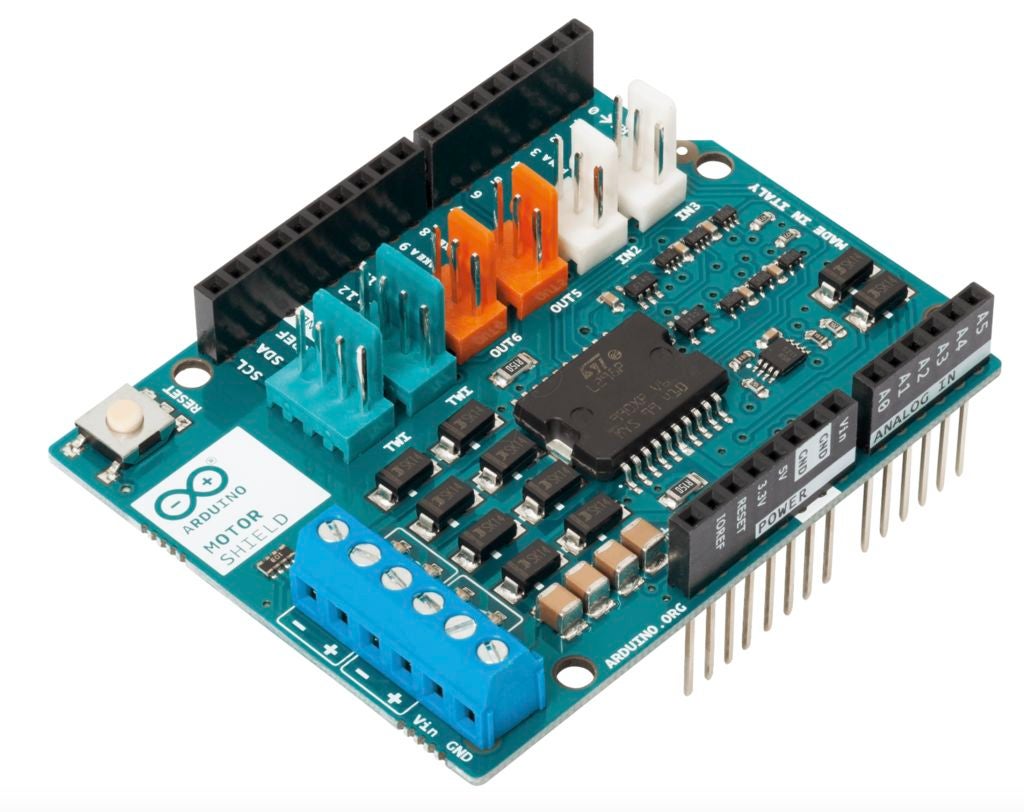
Arduino電機(jī)護(hù)罩 - Reichelt - 22.52€
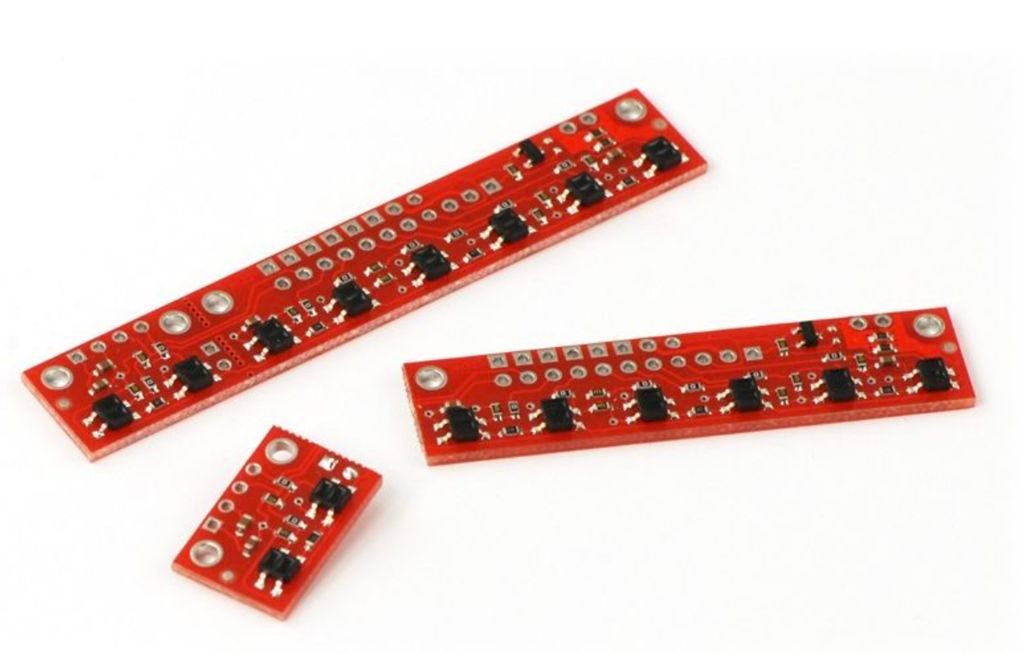
傳感器:
紅外線跟蹤器 - Mc Hobby - 16.54€
電池:
6x 1.5V電池
其他:
Protoboard
無(wú)線攝像頭(接收器) - Banggood - 21.63€
遙控器(發(fā)射器+接收器) - 亞馬遜 - 36.99€
充電底座(Qi接收器) - Reichelt - 22.33€(未使用 - 參見(jiàn)第7步:結(jié)論)
LED - 亞馬遜 - 23.60€
機(jī)械部件
DIY汽車底盤(pán)套件 - 亞馬遜 - 14.99€
使用:
1x開(kāi)關(guān)
1x腳輪
2x車輪
2x直流電機(jī)
1x電池持有人
未使用:
1x汽車底盤(pán)
4x M3 * 30螺絲
4x L12墊片
4x緊固件
8x M3 * 6螺絲
M3螺母
磁鐵 - 亞馬遜 - 9.99€
Bo lts,螺母,螺釘
M2 * 20
M3 * 12
M4 * 40
M12 * 30
所有相應(yīng)的堅(jiān)果
3D打印件:
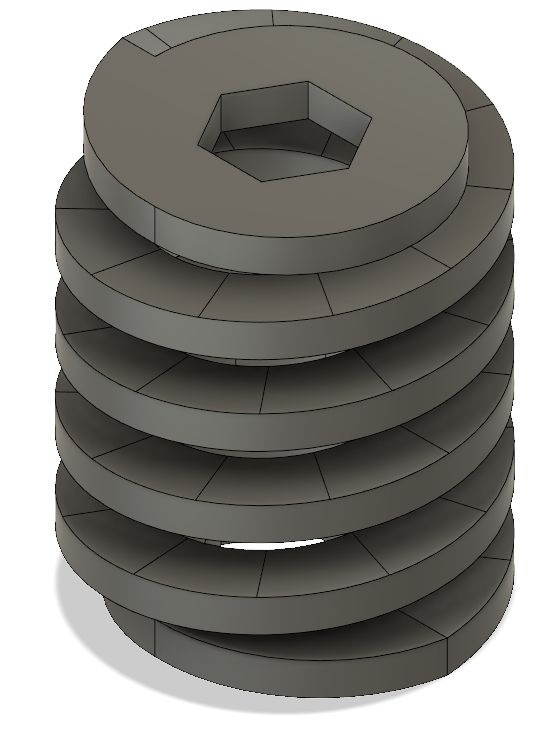
5x彈簧
2x電機(jī)固定
1x L形狀跟蹤器固定
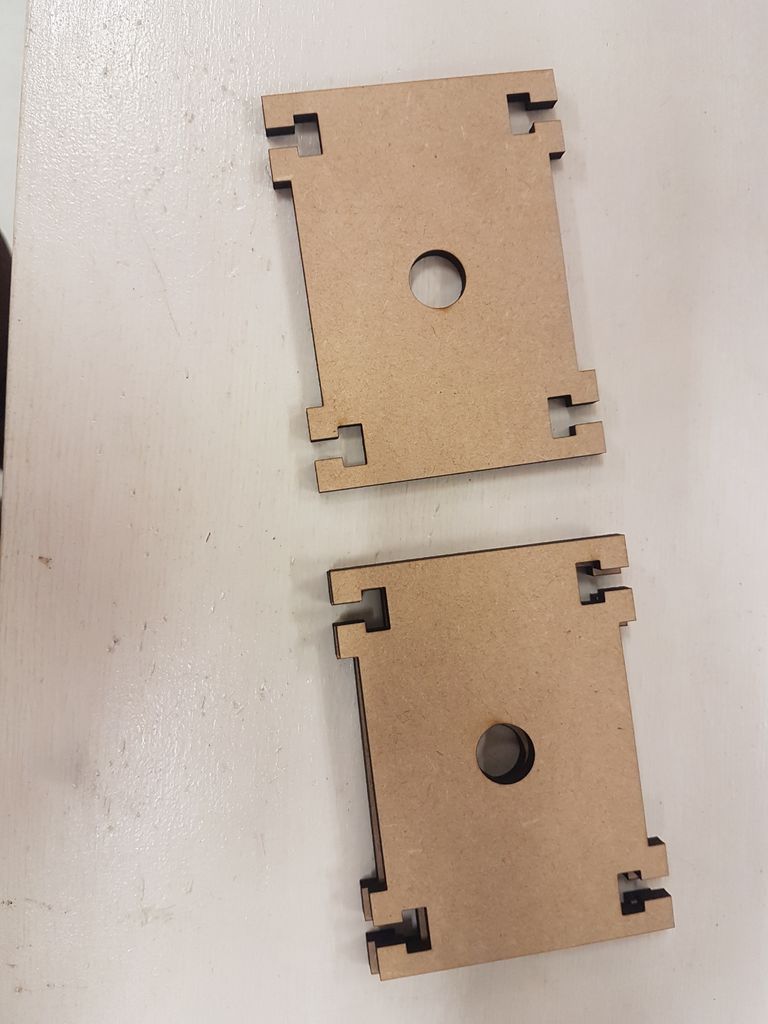
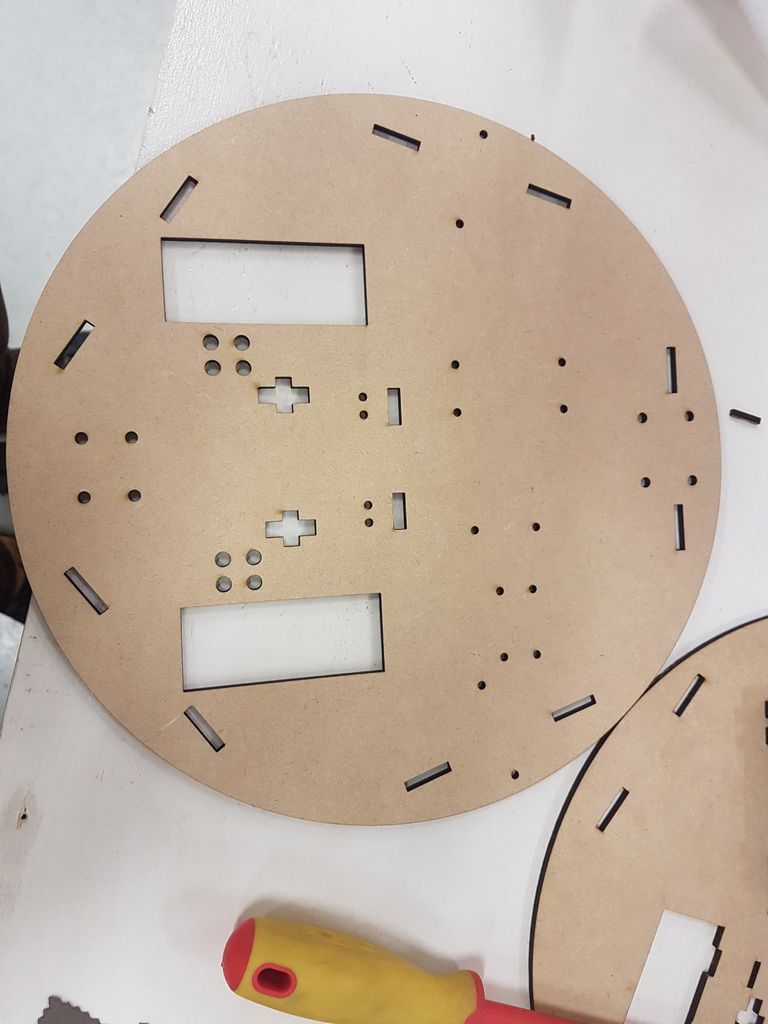
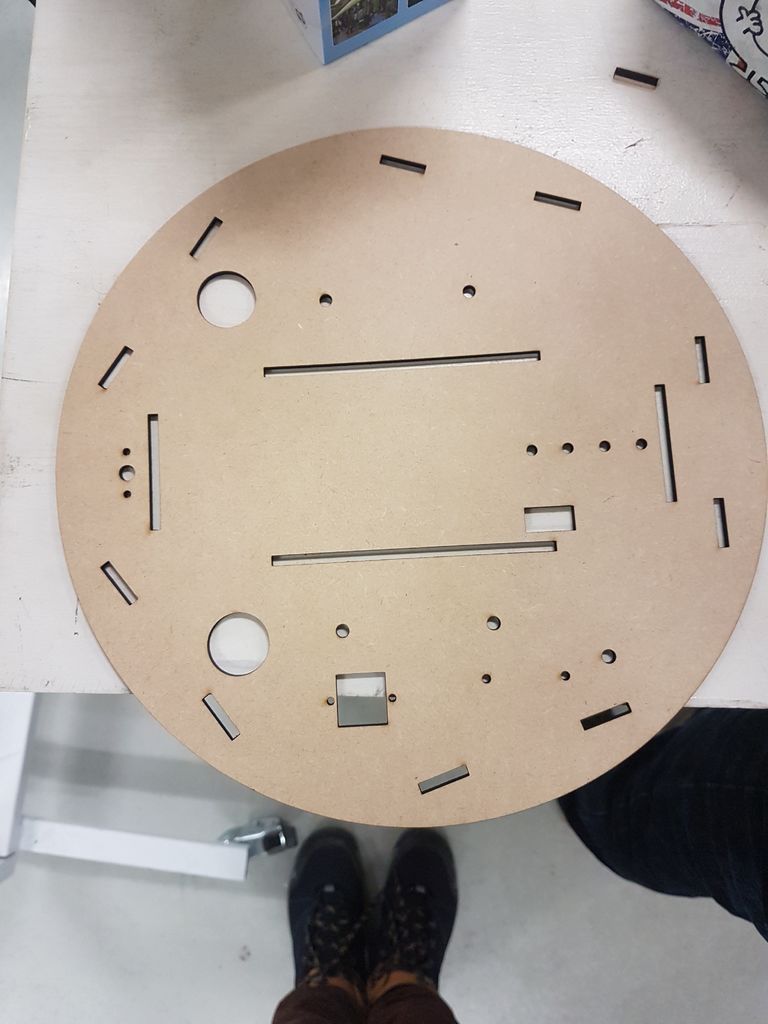
激光切割件:
2x圓形平板
5x矩形小平板
工具
機(jī)器:
3D打印機(jī)
激光切割機(jī)
螺絲刀
手動(dòng)鉆機(jī)
Lime
電子焊料
步驟3 :(激光)切割& (3D)打印
我們使用激光切割和3D打印技術(shù)來(lái)獲取我們的一些組件。
您可以在中找到所有CAD文件文件.step下面。
激光切割機(jī)
機(jī)器人的兩個(gè)主要固定件是激光切割的:
(材料= MDF紙板4mm)
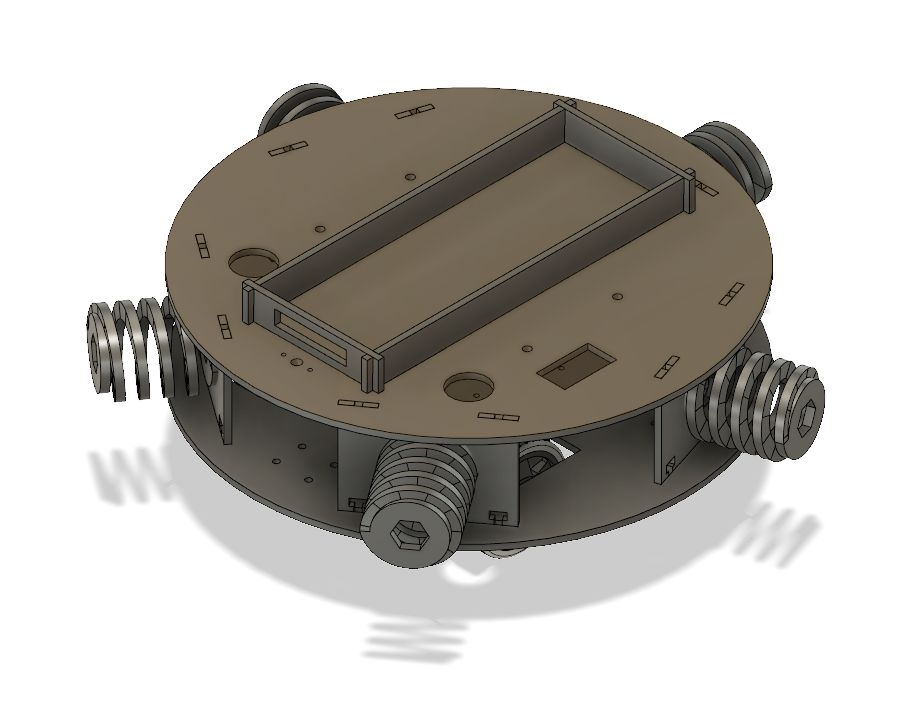
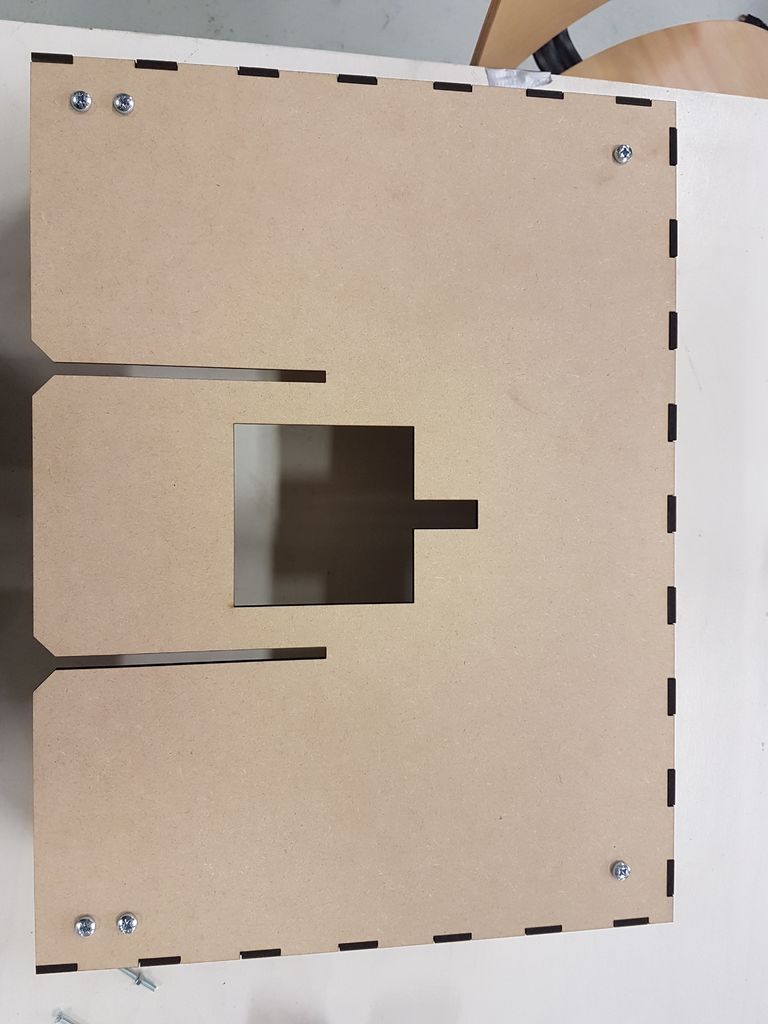
- 2個(gè)圓形平盤(pán),用于制作機(jī)器人的基礎(chǔ)(或底盤(pán))
- 兩個(gè)圓盤(pán)上的幾個(gè)孔,以容納機(jī)械和電子元件
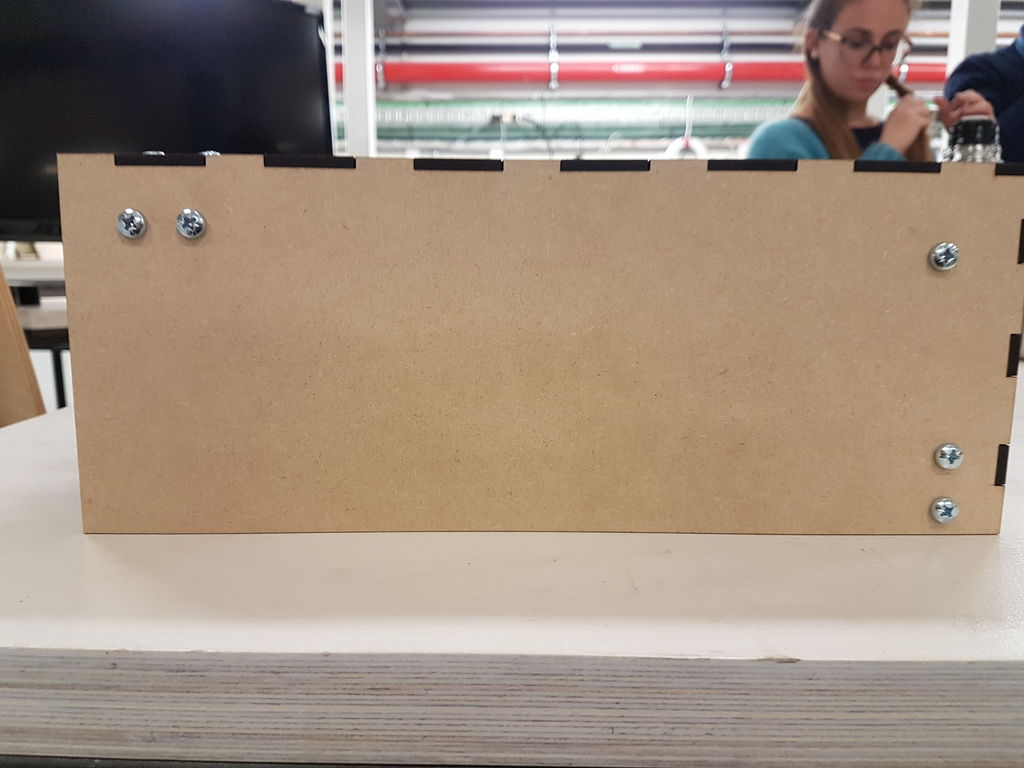
- 5個(gè)矩形小板,用于固定兩個(gè)底板之間的彈簧
3D打印機(jī)(Ultimakers& Prusa)
機(jī)器人的不同元素是3D打印的,為了同時(shí)賦予它們抵抗力和靈活性:
(材料= PLA)
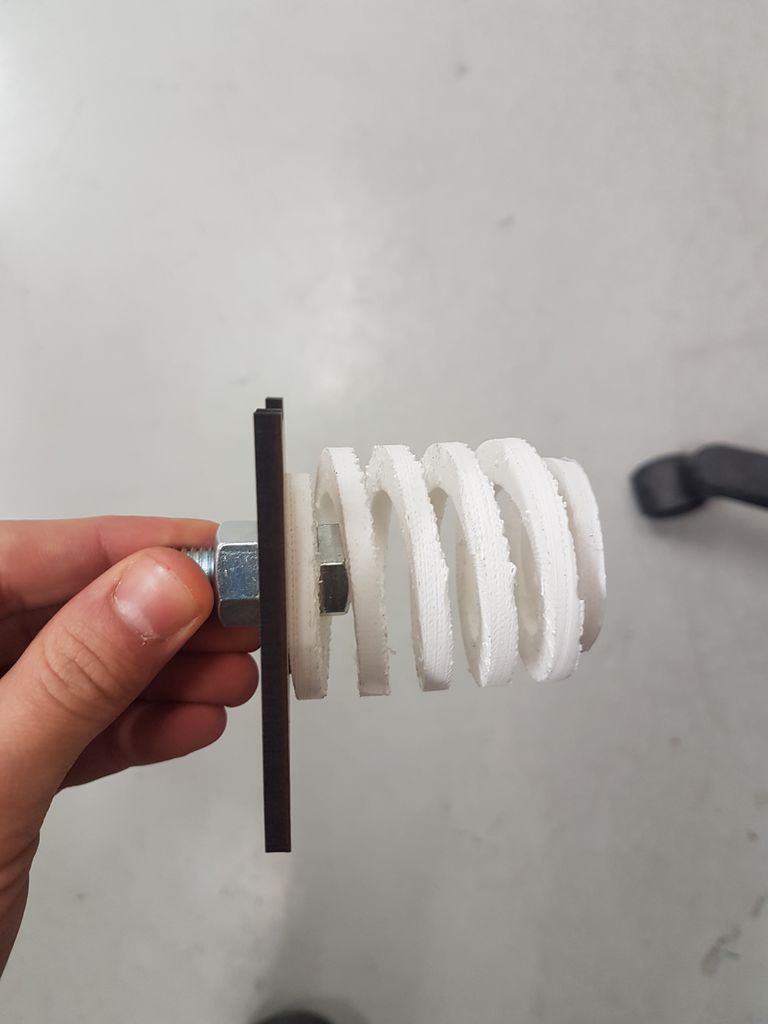
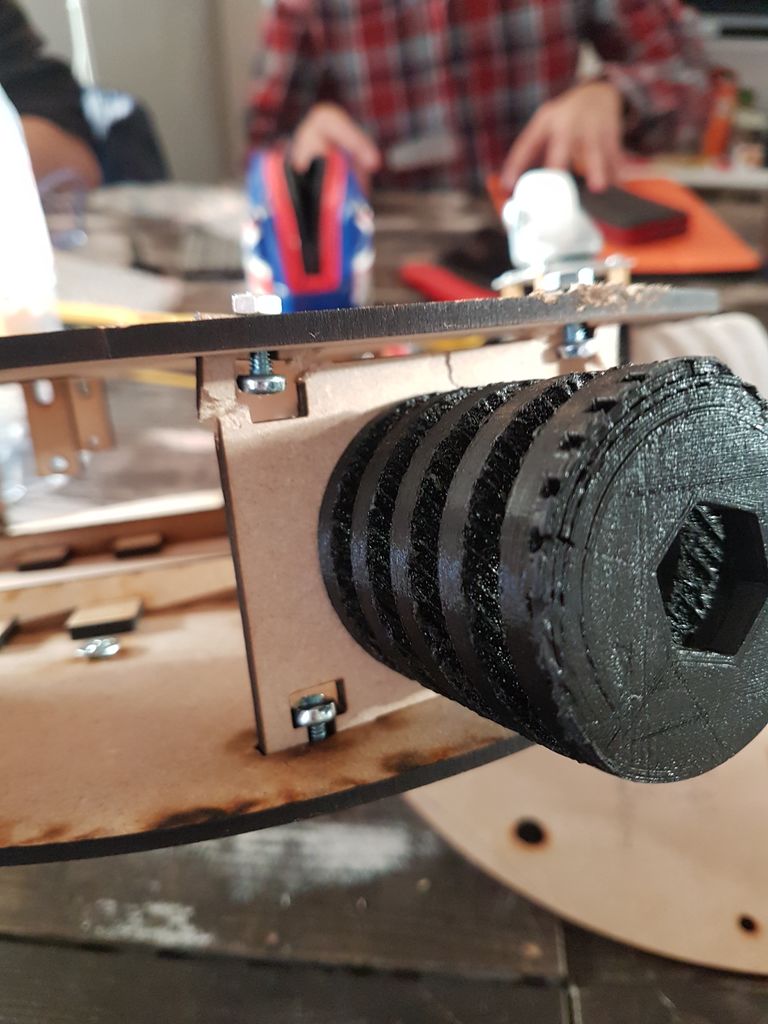
- 5個(gè)彈簧:注意彈簧是作為塊打印的,所以有必要將它們歸檔給它們‘彈簧’形狀!
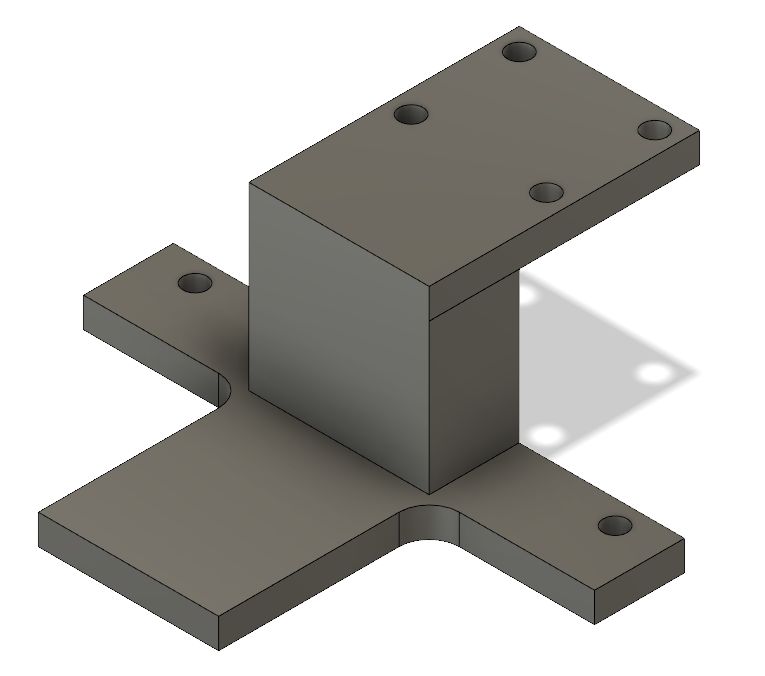
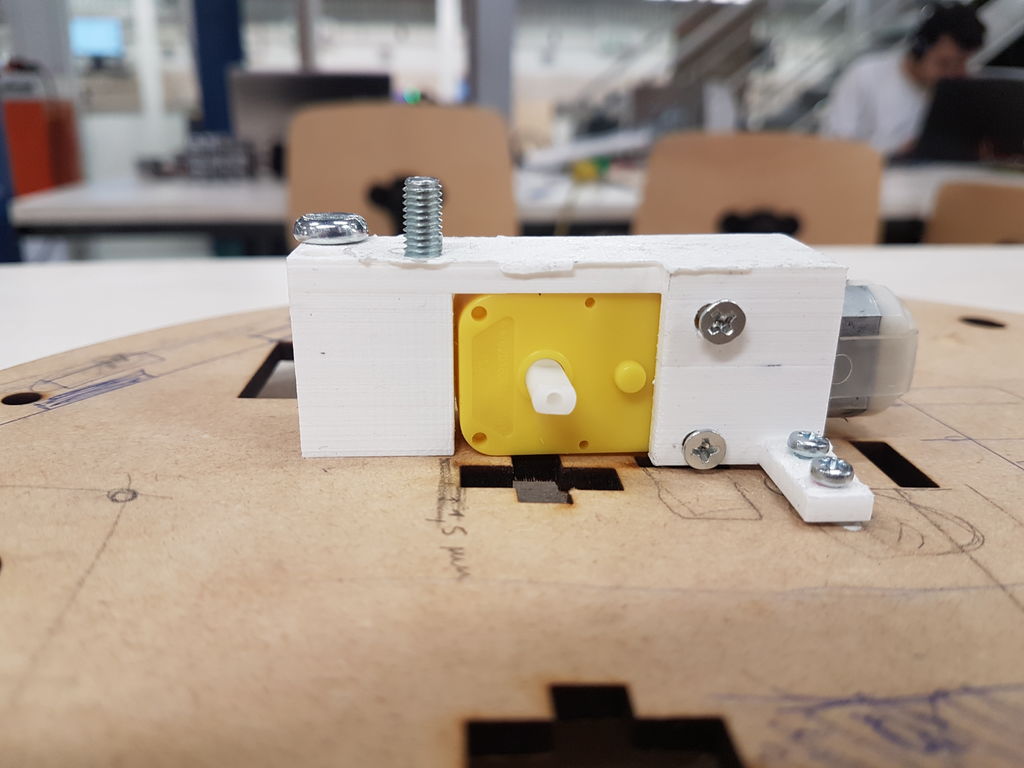
- 用于固定電機(jī)的2個(gè)矩形空心部件
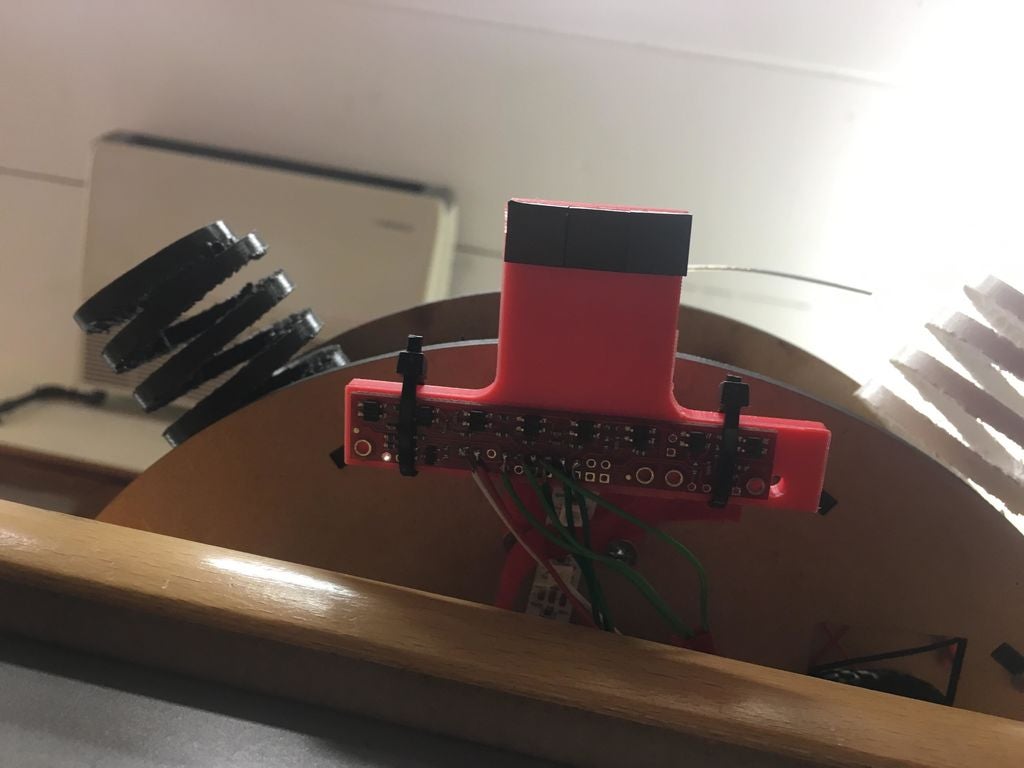
- 用于容納線跟蹤器的L形件
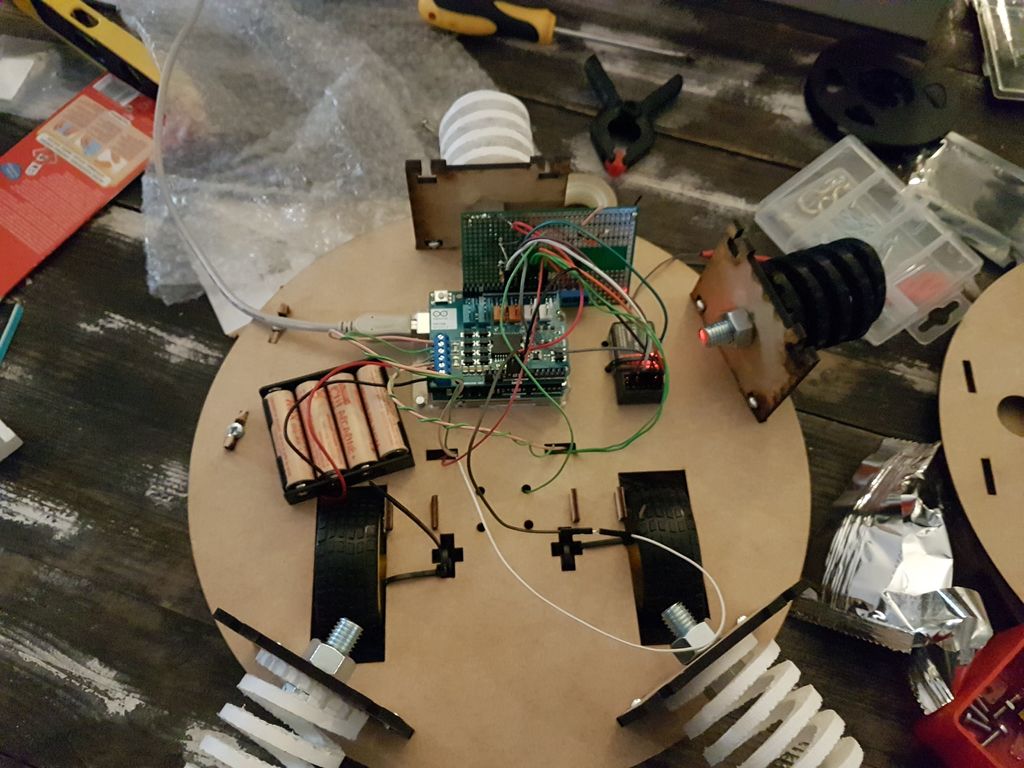
步驟4:組裝電子設(shè)備
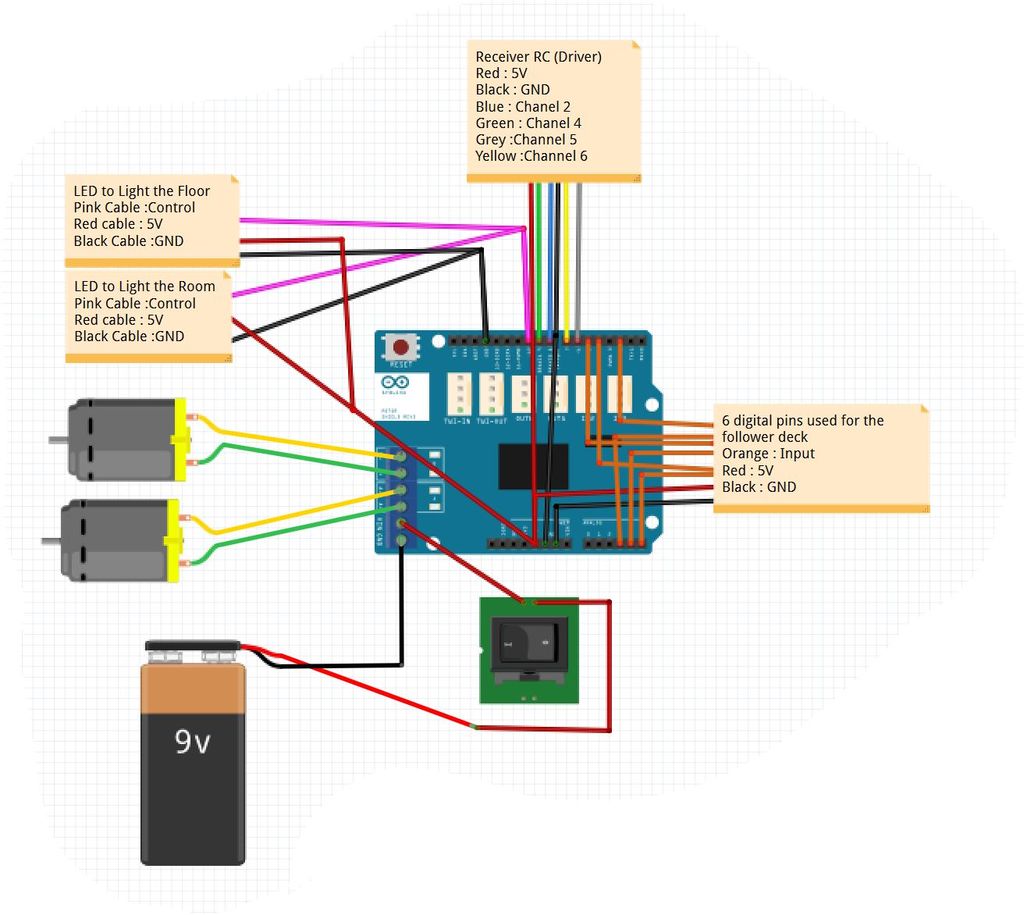
正如您在電子草圖中看到的那樣,Arduino是預(yù)期的中心部分電氣部分。
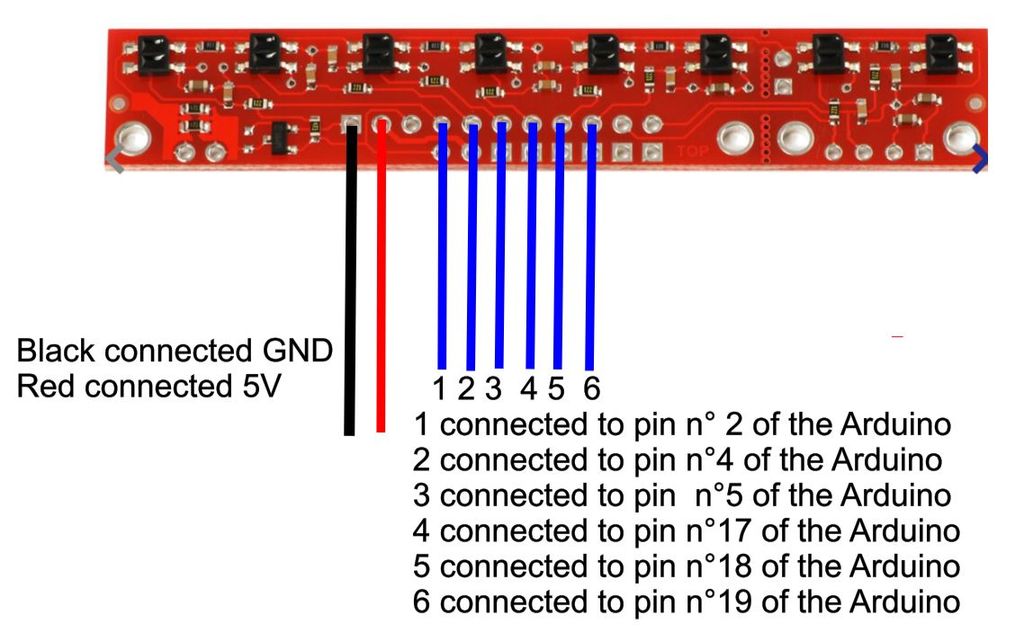
Connexion Arduino - 線跟蹤器:
(參見(jiàn)相應(yīng)的跟隨者草圖)
Connexion Arduino - Motors:
(參見(jiàn)相應(yīng)的一般草圖 - 左)
Connexion Arduino - 遙控接收器:
(參見(jiàn)相應(yīng)的一般草圖)
Connexion Arduino - LED:
(參見(jiàn)相應(yīng)的一般草圖 - 左)
使用一個(gè)protoboard來(lái)增加5V和GND端口的數(shù)量并方便所有連接。
這一步不是最簡(jiǎn)單的一步,因?yàn)樗枰獫M足上面強(qiáng)調(diào)的要求(自主性,用戶友好性,魯棒性,安全性),并且電路需要特別注意和預(yù)防。
步驟5:編碼
編碼部分涉及Arduino,電機(jī),遙控器,線路跟蹤器和LED。
您可以在代碼中找到:
1。變量聲明:
RC接收器使用的引腳聲明
直流電機(jī)使用的引腳聲明
使用的引腳聲明by LED
函數(shù)‘Riddle’使用的變量聲明
IR傳感器使用的引腳聲明
IR Deck使用的變量聲明
2。初始化功能:初始化不同的引腳和LED
功能‘setup()’
3。電機(jī)功能:
功能‘turn_left()’
功能‘turn_right()’
功能‘CaliRobot()’
4。功能線跟蹤器:在機(jī)器人的半自動(dòng)行為中使用先前的‘CaliRobot()’函數(shù)
功能‘跟隨者()’
5。遙控器(謎語(yǔ))的功能:包含呈現(xiàn)給玩家的謎語(yǔ)的正確解決方案
功能‘謎語(yǔ)()’
6。主循環(huán)功能:一旦定時(shí)器超過(guò)30,就可以讓玩家控制汽車一旦找到解決方案,啟動(dòng)定時(shí)器,并將輸入從數(shù)字(遙控)切換到數(shù)字(自主)分鐘
函數(shù)‘loop()’
代碼的主要過(guò)程在上面的流程圖中解釋,主要功能突出顯示。
您還可以在.ino附件中找到該項(xiàng)目的完整代碼,該文件是使用開(kāi)發(fā)接口Arduino IDE編寫(xiě)的。
步驟6:組裝



我們有了激光切割,3D打印和準(zhǔn)備好的所有組件:我們可以組裝整個(gè)組件!
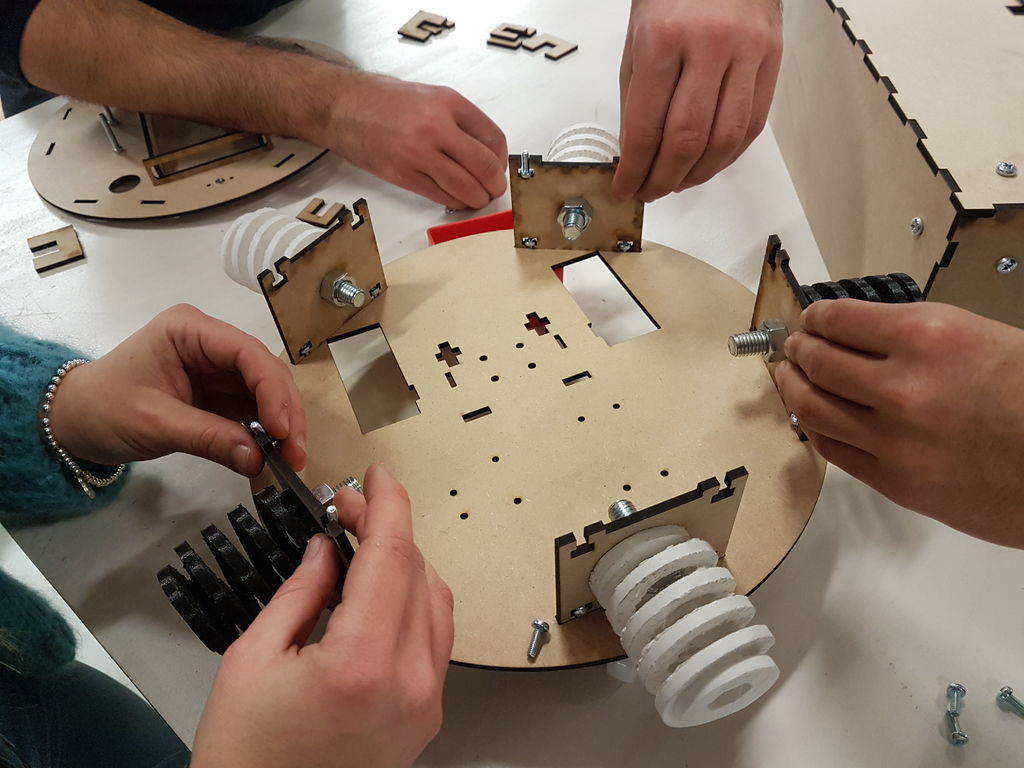
首先,我們將激光切割矩形板上的3D打印彈簧用直徑等于直徑的螺栓固定彈簧內(nèi)的孔。
一旦將5個(gè)彈簧固定在它們的小板上,我們就可以用較小的螺栓將后者固定在下機(jī)箱板上。
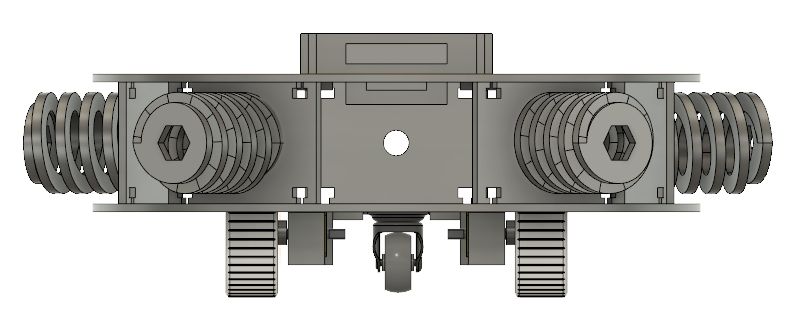
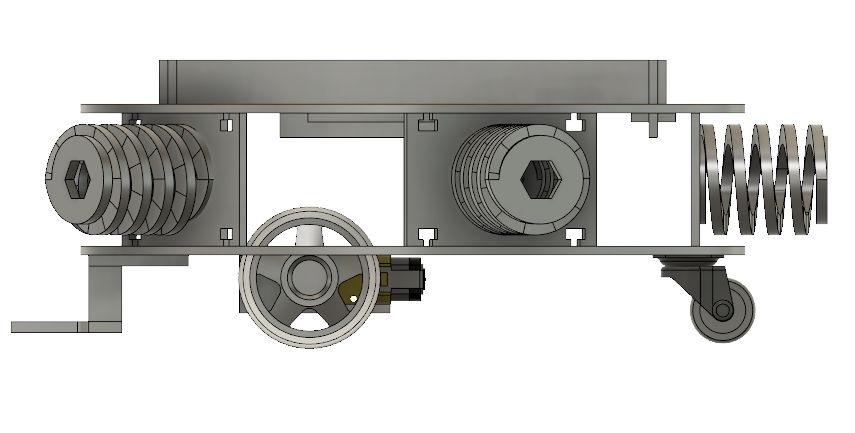
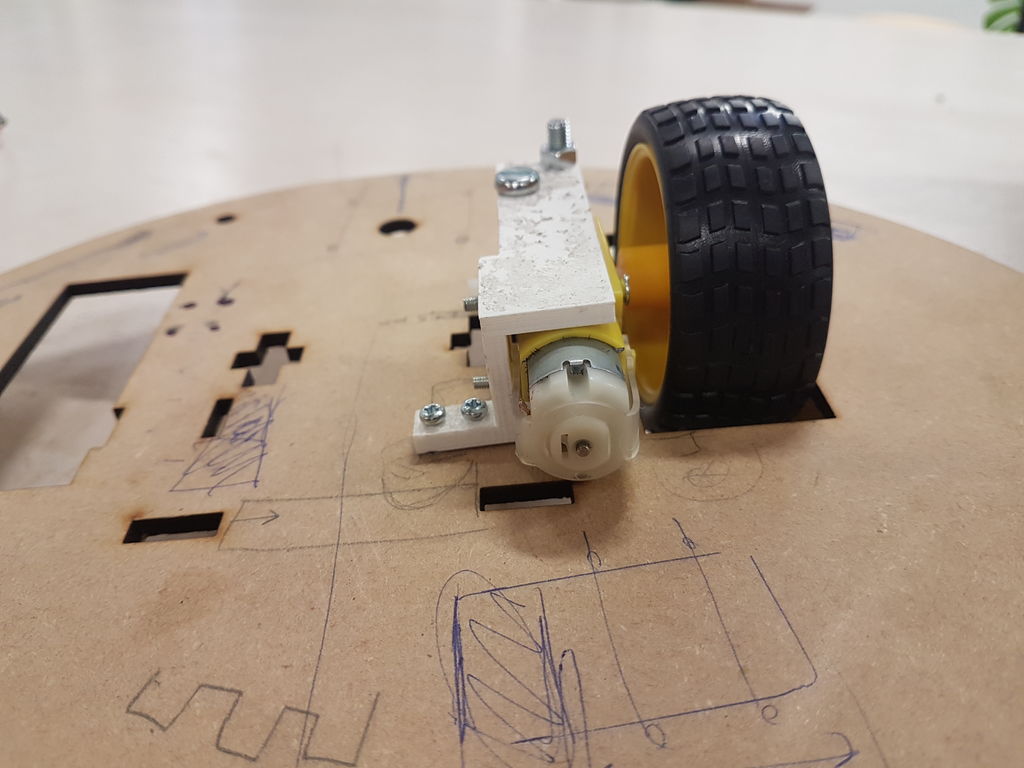
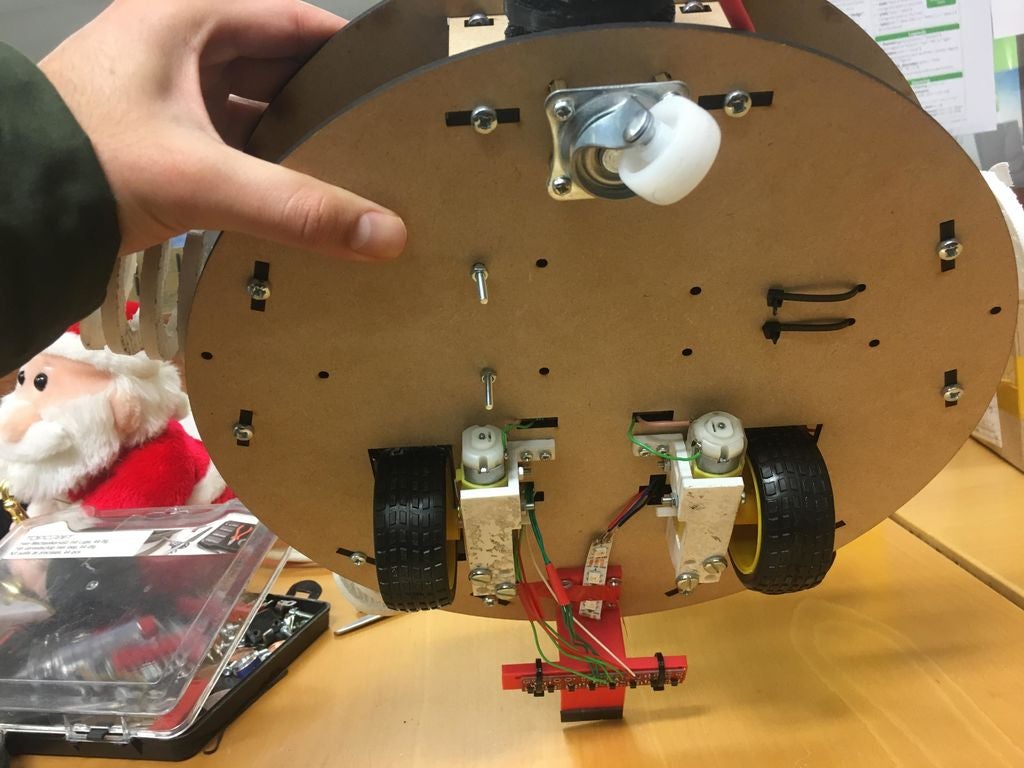
其次,我們可以將電機(jī)固定在3D打印的電機(jī)固定裝置上,下機(jī)箱板帶有小螺栓。
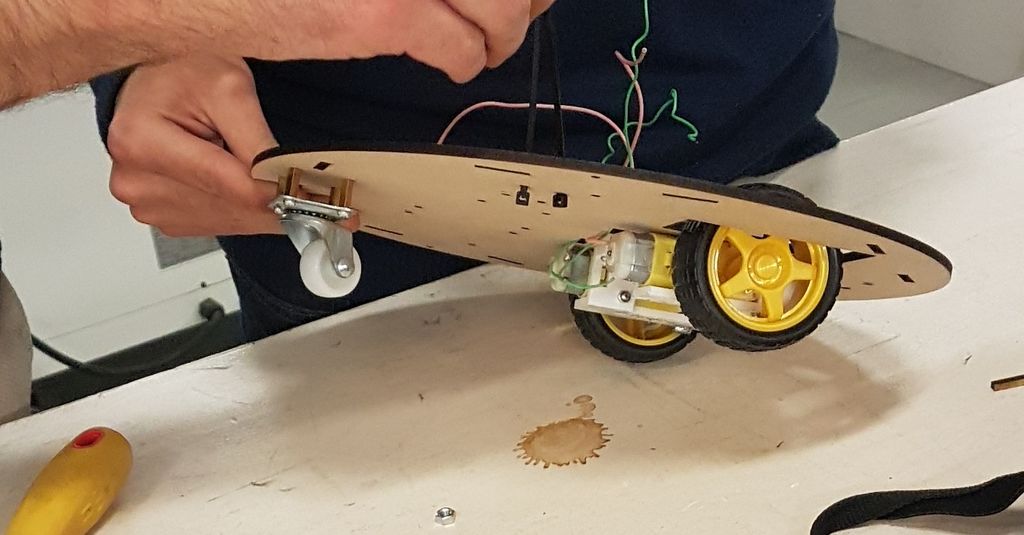
一旦固定完畢,我們就可以將2個(gè)車輪固定在下機(jī)箱板孔內(nèi)的電機(jī)上。
第三,我們可以使用小螺栓固定腳輪下方的腳輪,使下機(jī)箱板處于水平位置
我們現(xiàn)在可以修復(fù)所有其他組件
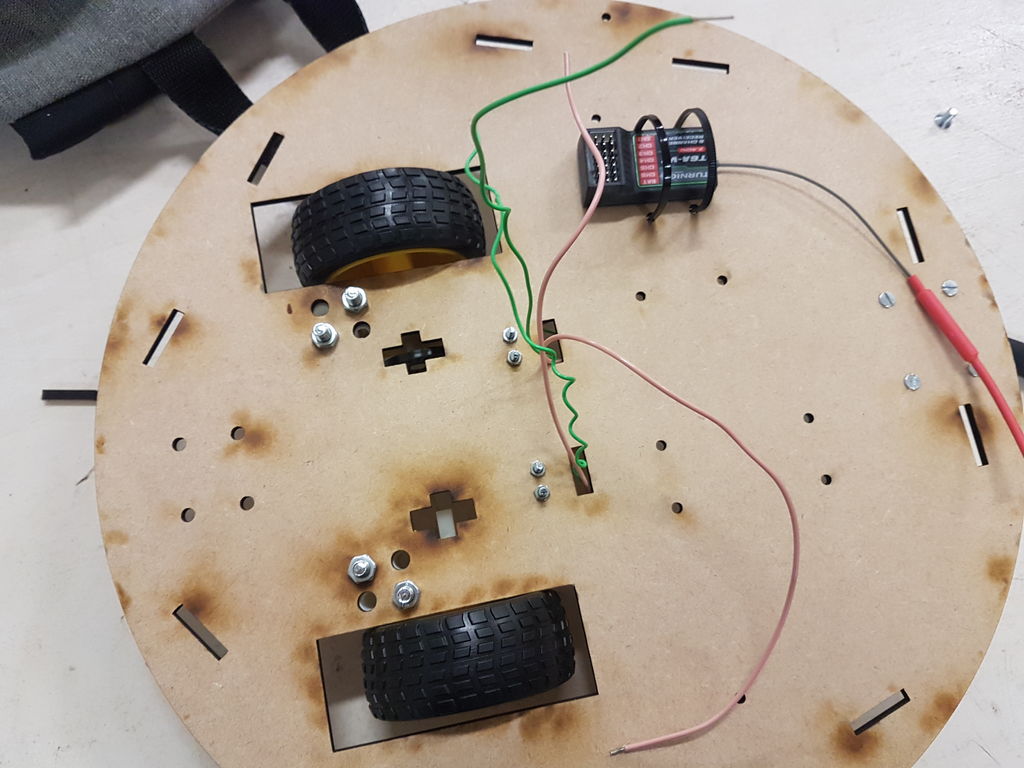
下機(jī)箱盤(pán)子:
下面:
線路跟蹤器
LED
結(jié)束:
遙控器接收器
Arduino&電機(jī)護(hù)罩
LED
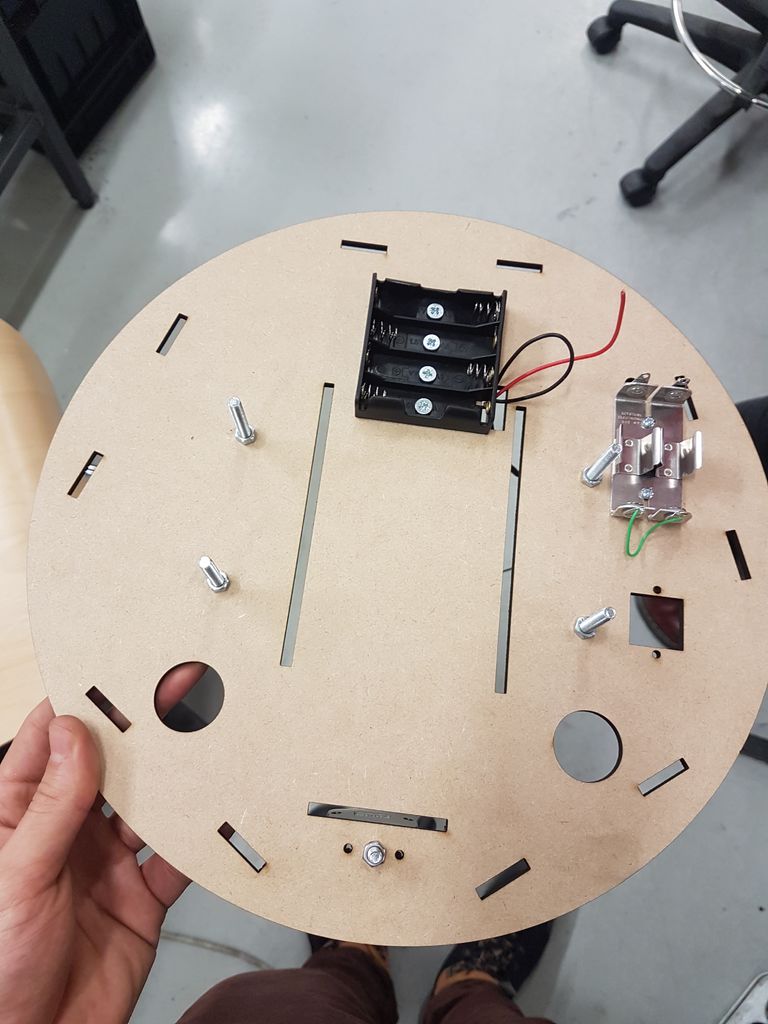
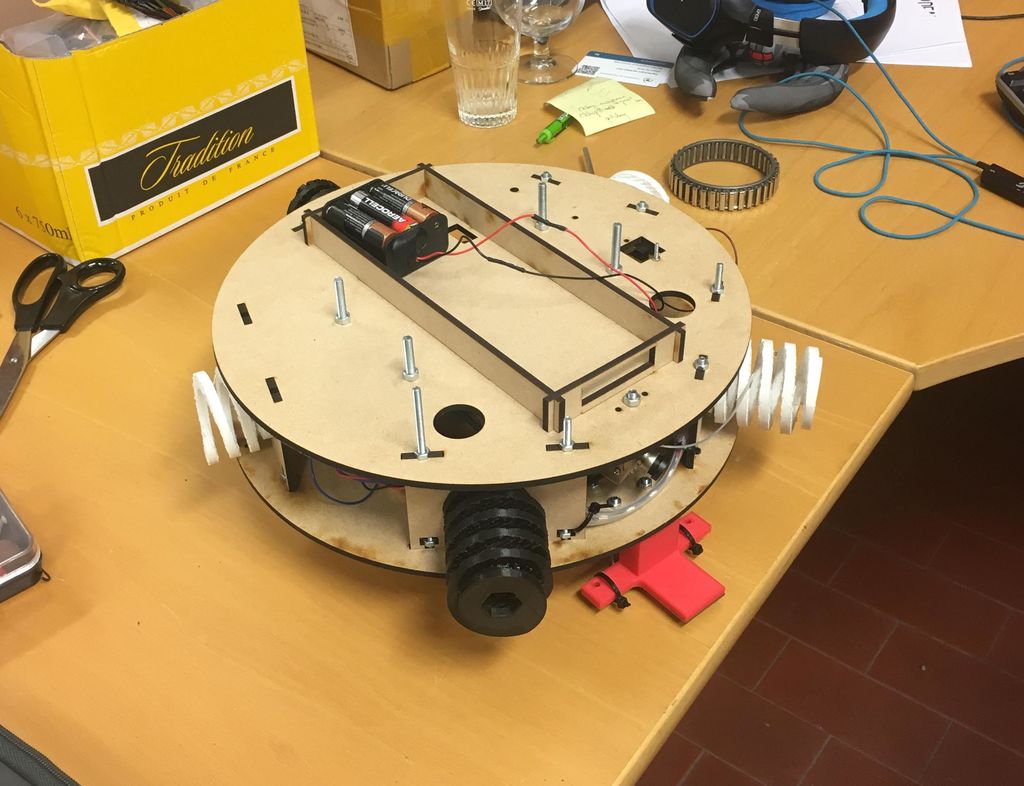
上機(jī)箱板:
下圖:
攝像頭
結(jié)束:
電池
開(kāi)/關(guān)開(kāi)關(guān)
最后,我們可以將兩個(gè)底板組裝在一起。
注意:將所有組件組裝在一起時(shí)要小心!
在我們的例子中,一個(gè)彈簧的小板在組裝兩個(gè)底板時(shí)受損,因?yàn)樗×恕N覀冊(cè)俅我愿蟮膶挾乳_(kāi)始。
使用激光切割(以及3D打印機(jī))時(shí)一定要使用堅(jiān)固的材料,并確認(rèn)尺寸,以免您的碎片太薄或太脆弱。
第7步:結(jié)論


一旦組裝好所有組件(確保所有組件都固定好并且不會(huì)有脫落的風(fēng)險(xiǎn)),相機(jī)的接收器連接到屏幕(即電視屏幕),電池(6x 1.5V)放置在電池座上,你準(zhǔn)備測(cè)試整個(gè)東西了!
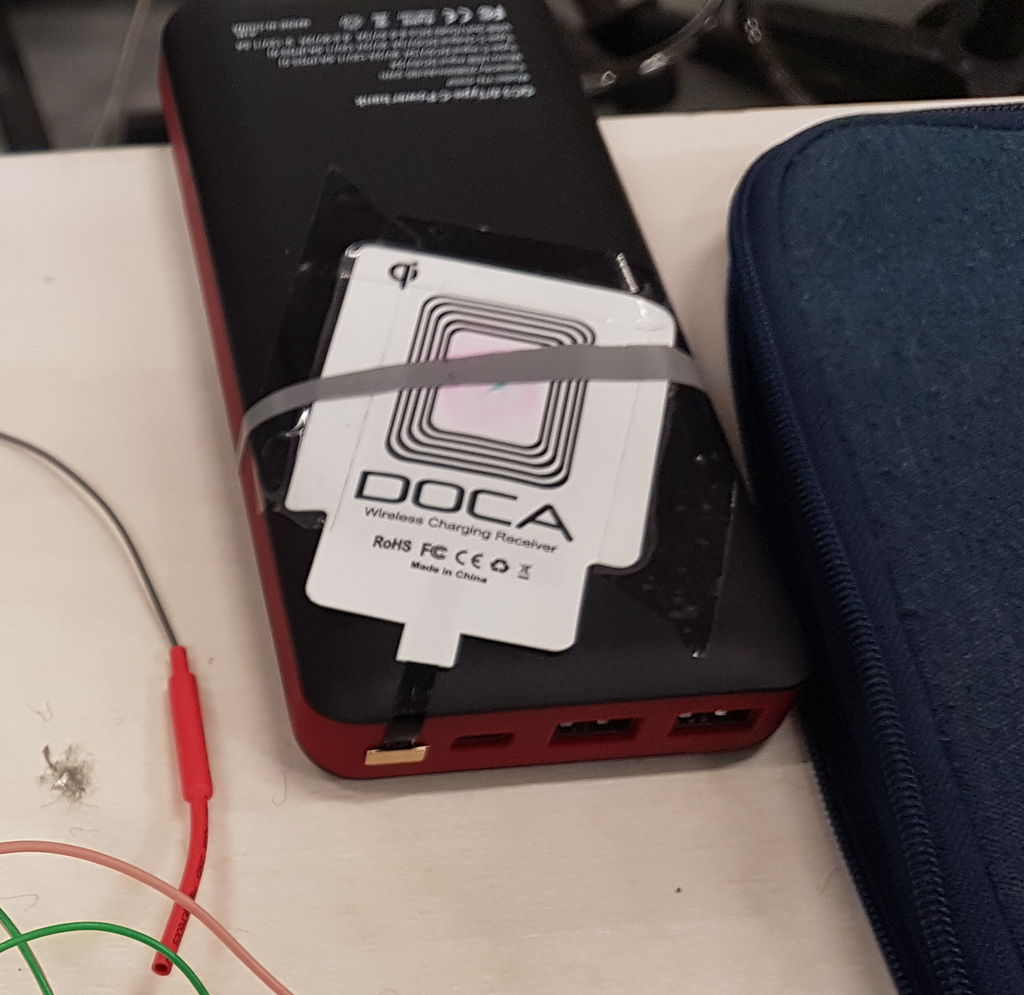
我們?cè)噲D通過(guò)便攜式電池更換電池(6x 1.5V)進(jìn)一步推進(jìn)該項(xiàng)目:
構(gòu)建充電底座(固定在激光器中的無(wú)線充電器)切充電站(見(jiàn)照片));
在便攜式電池上添加接收器(Qi接收器)(見(jiàn)照片);
在Arduino上寫(xiě)一個(gè)功能,要求機(jī)器人沿著相反方向跟隨地面上的線路到達(dá)充電座并為電池充電,以便整個(gè)機(jī)器人自動(dòng)為下一個(gè)游戲會(huì)話做好準(zhǔn)備。
我們?cè)陧?xiàng)目截止日期之前遇到了用便攜式電池更換電池的問(wèn)題(提醒:這個(gè)項(xiàng)目是由我們的ULB/VUB教授監(jiān)督的,因此我們有一個(gè)截止日期尊重),我們無(wú)法測(cè)試最終的機(jī)器人。您仍然可以在這里找到由計(jì)算機(jī)供電的機(jī)器人視頻(USB連接)并由遙控器控制。
盡管如此,我們還是能夠達(dá)到我們所定位的所有附加值:
- 堅(jiān)固性 - 圓形
- 開(kāi)啟式謎語(yǔ) - 控制開(kāi)關(guān)(遠(yuǎn)程 - 》自主)
如果這個(gè)項(xiàng)目保留了您的注意力和您的好奇心,我們非常好奇看到你做了什么,看看你是否做了一些與我們不同的步驟,看看你是否成功完成了自動(dòng)充電過(guò)程!
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31097瀏覽量
222362
發(fā)布評(píng)論請(qǐng)先 登錄
再談低溫?zé)Y(jié)銀的應(yīng)用:從春晚四家機(jī)器人出鏡的幕后推手說(shuō)起
Faraday Future發(fā)布三大系列具身智能人形與仿生機(jī)器人產(chǎn)品
RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
小蘿卜機(jī)器人的故事
NVIDIA Isaac Lab推動(dòng)機(jī)器人技術(shù)突破
機(jī)器人競(jìng)技幕后:磁傳感器芯片激活 “精準(zhǔn)感知力”
可靠性測(cè)試裝備為仿生機(jī)器人未來(lái)發(fā)展賦能

工業(yè)機(jī)器人的特點(diǎn)
機(jī)器人看點(diǎn):越疆機(jī)器人正式發(fā)布六足仿生機(jī)器狗 智元公布機(jī)器人運(yùn)動(dòng)控制模型專利
中國(guó)成功研發(fā)蚊子大小仿生機(jī)器人
盤(pán)點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門(mén)的引路書(shū)
星網(wǎng)宇達(dá)與吉林省仿生機(jī)器人創(chuàng)新中心達(dá)成戰(zhàn)略合作
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開(kāi)源六軸機(jī)械臂產(chǎn)品
EtherCAT科普系列(4):EtherCAT技術(shù)在人形機(jī)器人靈巧手領(lǐng)域應(yīng)用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論