 關于無人駕駛視覺感知系統的分析和介紹
關于無人駕駛視覺感知系統的分析和介紹

這是說在沒有GPS的的情況下,依靠模擬人類的視覺感知方位和障礙么?
先有請杜勇博士——
杜勇,2016年博士畢業于中科院自動化研究所模式識別國家重點實驗室,主要從事深度學習、視頻分析、行為識別、視覺目標檢測跟蹤及識別方面的研究。
先從導航地圖的使用說起
首先,設想這樣一個問題,我們計劃開車去往一個陌生的地方,通常我們會首先打開導航地圖,規劃一下總體路線,這個地圖并不需要特別高的精度。
然后我們在導航地圖的幫助下沿著預先規劃好的路線開車趕往目的地,一路上我們需要通過眼睛觀察周邊的行車環境,必要時需要耳朵來輔助,實時根據周圍的路況來決策并控制車輛前行。
也就是說,我們并不需要預先知道所要行駛的道路上及周邊每一個目標的精確方位及狀態,只要沿著預定的路線行進并確保車輛安全行駛,最終一定可以到達目的地。
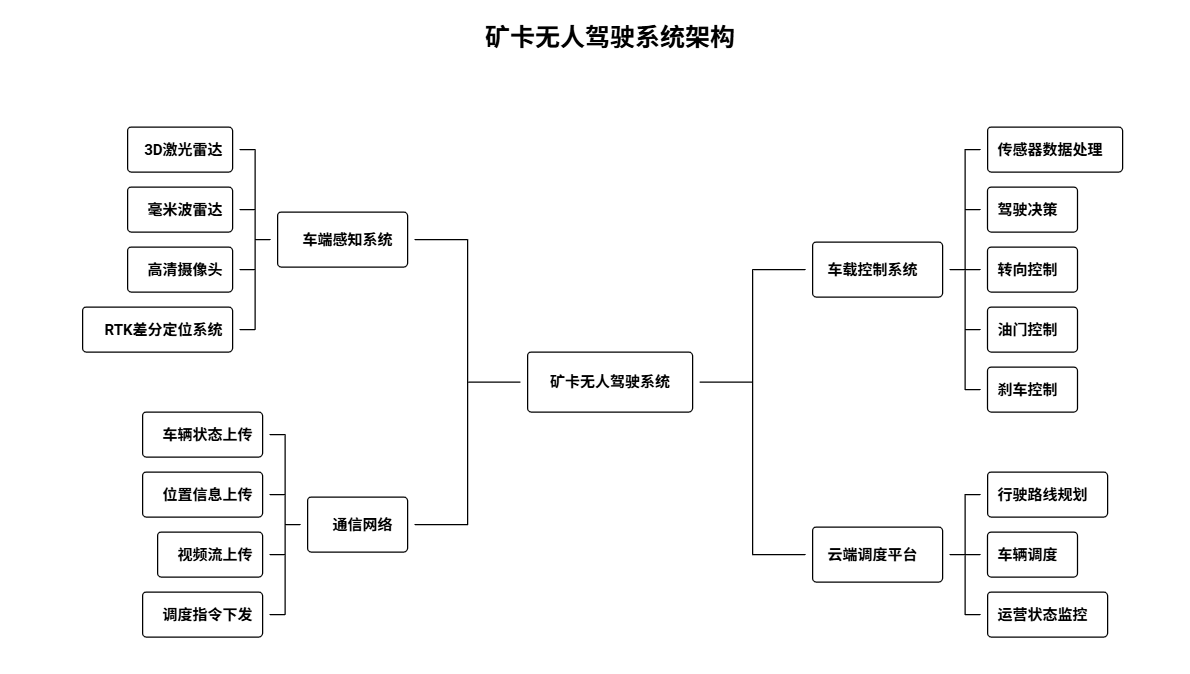
概括來說,我們需要具備兩個條件,即普通的導航地圖和實時感知并控制車輛運行的能力。以此分析,未來無人駕駛的一種合理實現方式是車輛可以根據一份普通的導航地圖,結合自身強大的環境感知能力實現自主駕駛,其重點就在于環境感知。
問題來了,現在的車輛對周邊環境怎么感知?
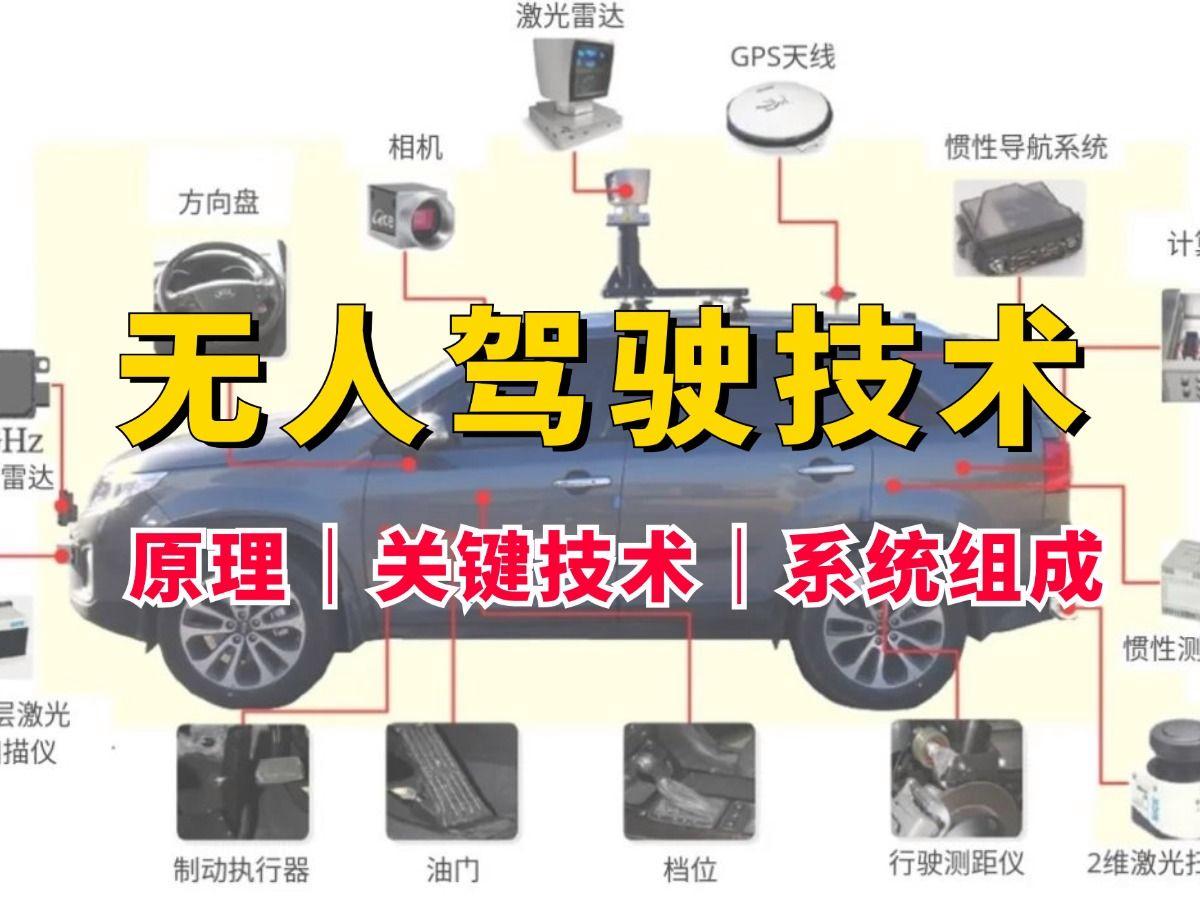
一種是通過車載激光雷達主動掃描,以實現對周圍目標的定位和測距;另一種則是純視覺模式,簡單講就是利用攝像頭采集車輛周圍環境數據,并通過計算機視覺算法分析車輛周圍目標的方位和運動參數。
其中,前者技術已較為成熟。后者雖起步較晚,但得益于近幾年計算機視覺和深度學習的快速發展而進步神速。
高精度的激光雷達雖然可以實現車輛對周圍環境的精確感知,但因其成本高昂,難以大規模商業應用。同時單純地依靠激光雷達并不能定位出車輛在路面上的具體位置,必須配屬高精地圖,這并不是一種經濟理想的方案。
而純視覺的感知模式成本較低,客觀上也符合人類開車過程中對周圍環境的感知模式,是一種比較理想的方案,但其難點在于算法設計。
我們怎么去做車輛對周圍環境的感知?
其實說起來并不復雜。
第一需要確定出車輛自身在路面上的相對位置,第二則需要確定出車輛周圍目標相對于車輛自身的位置及運動狀態。
總體上,位置信息的確定涉及到可行駛區域分割、車道線檢測、車輛行人等目標檢測及視覺測距,運動狀態的估計涉及到目標跟蹤和視覺測距,車輛周圍環境信息的描述則需要建立統一的坐標系。
客觀上,這些都關系到無人駕駛的核心問題,即行車安全,因此技術指標需求都很高;但相對而言,對目標檢測的召回率要求最高,畢竟行車方向上一定范圍內的目標一旦漏檢,就很可能釀成事故,對車道線的檢測精度要求次之,而對可行駛區域分割精度要求相對較低。
雖然當前計算機視覺和深度學習的發展,為解決這些問題提供了可能,但受限于車載計算平臺的運算能力,我們難以在車上部署重量級的深度學習模型,因此如何在車載平臺上做到最大化算法精度的同時確保較高的執行效率是算法設計的核心問題。
為解決這一問題,需要在算法設計和模型加速兩個層面來做工作。
在算法設計層面,需要明確任務需求,針對不同指標的要求等級來規劃算法的各步操作,統籌合理分配各模塊允許的計算量,實現總體性能的最優化。例如,無人駕駛中目標跟蹤的目的,是為了分析周圍目標的運動狀態參量,對跟蹤問題中常見的遮擋和交叉問題的處理能力要求不高,因此,我們可以采用高速的跟蹤算法結合高精度的檢測模型來實現相對可靠的跟蹤過程。
降低模型的計算量
一類是利用深度學習模型連接權重分布的稀疏性,通過模型裁剪、量化編碼、模型蒸餾、二值化等方式來降低模型計算量。
第二類則是在深層剖析網絡局部連接作用的基礎上通過優化網絡結構來降低網絡冗余,從而提高計算效率,典型代表如MobileNet。
第三是針對已經訓練好的模型通過優化底層計算時的并行計算密度來提高模型inference過程的執行效率,該類方法針對性很強,主要適用于GPU計算平臺,典型的實現如NVIDIA的TensorRT,其實現方式決定了對inception結構的網絡具有很高的加速比(具體加速效果還受制于GPU的IO帶寬和流處理器數量)。
一般情況下,車載計算平臺主要是FPGA或者相對低端的GPU。若為FPGA,合適的優化加速方法是模型裁剪、量化編碼和二值化,當然在進行這些工作之前也可以先進行模型蒸餾;若計算平臺為低端GPU,最好的方式是結合任務需求設計針對性的具有inception結構的網絡模型,在部署時先經channel裁剪再基于TensorRT(或者自己實現TensorRT的計算方式)做高倍加速。
單純地基于視覺來解決無人車的路況感知問題是可行的,但是還有很長的路要走,無人車的發展過程應該是一個視覺逐步替代高端激光雷達的過程。
現實中任何一款傳感器都存在穩定性問題,都會有其優勢和不足,為了確保行車安全這一最核心要素,未來無人車的環境感知部分一定是多傳感融合的結果。
-
傳感器
+關注
關注
2576文章
55067瀏覽量
791516 -
無人駕駛
+關注
關注
100文章
4297瀏覽量
126853 -
深度學習
+關注
關注
73文章
5599瀏覽量
124411
發布評論請先 登錄
格陸博科技榮獲2025低速無人駕駛行業TOP20核心供應鏈獎
佑駕創新助力低速無人駕駛行業高質量發展
礦卡無人駕駛從理論到落地的全過程記錄(轉載)
小馬智行無人駕駛車參與第十五屆全運會火炬傳遞
2025無人駕駛技術細節及發展趨勢|(星創易聯細節解析)
無人駕駛:智能決策與精準執行的融合
臂螺旋天線:為無人駕駛機器打造高精度導航新體驗
主線科技無人駕駛集卡助力中越智慧口岸建設
智行者科技無人駕駛小巴落地海南

無人駕駛技術未來在哪里?低速才是突破口

內蒙古首個超百臺增程式無人駕駛礦卡項目落地
智行者無人駕駛技術助力應急救援智能化升級
無人駕駛解決方案包含哪些方面?感知、決策與控制



 工商網監
工商網監
評論