 行業 | 利用數字微鏡器件的嵌入式三維視覺系統
行業 | 利用數字微鏡器件的嵌入式三維視覺系統

摘要:利用結構光獲取待測物體的三維信息,其操作簡便、成本較低、能夠快速成像,在保護文物、生物醫療、逆向工程等領域有廣泛的應用。為了在三維重構場景下快速獲取待測物體的三維信息,設計了一種無標定的嵌入式三維視覺系統,利用數字微鏡器件高速開關特性,產生基于時間調制的格雷碼結構光,實現了無標定三維信息的快速獲取。其中包括結構光編碼、圖像二值化、結構光解碼、結構光畸變量獲取和生成三維點云等步驟。實驗結果表明,該系統極大簡化了三維信息的獲取步驟和運算過程。
關鍵詞:數字微鏡器件;結構光;嵌入式;系統設計;無標定算法;三維信息獲取
0 引言
目前獲取物體的三維信息方式主要為無接觸式。大部分無接觸式測量方法均采用光學進行測探,在保護待測物體不受損壞的同時還可以大幅提高三維信息獲取的速度。
無接觸式三維測量方法分為主動式測量和被動式測量。被動式測量時通過多個相機經過校準后從多個不同的角度對待測物體成像,并通過對比圖像之間關系來獲取待測物體的三維信息。但是被動式測量獲取的三維信息質量取決于物體本身紋理,因此該方法成像密度低,質量差。主動式測量則使用一個相機代替多個相機,通過投射一系列特定圖案的結構光到待測物體表面,可以使相機可拍攝的紋理數目大幅增加,且能夠根據具體環境設置結構光的紋理圖案和紋理數目。因此,主動式測量能夠擺脫對物體本身紋理的依賴,減小了設備復雜度,大幅提高了三維信息獲取的質量和速度。
在物體三維信息提取之前,還需要對系統中的圖像捕獲設備和產生結構光的投影設備進行標定,此標定過程需要耗費大量的時間和計算資源。因此可以通過產生多種不同的結構光,通過相互之間的對比關聯獲取物體的三維信息,從而回避繁瑣復雜的設備標定操作。因此需要可以高速產生結構光的投影設備代替普通投影儀來加速圖像采樣過程。
數字微鏡器件集成微機電系統和空間光調制于一體,憑借其高速的開關速度,非常適用于需要高速產生結構光的主動式無標定三維信息測量之中。本文將介紹自主研發設計,集成ARM和FPGA的數字微鏡驅動系統,通過分析待測物體三維信息獲取的原理,利用此系統能夠快速、準確地完成待測物體三維信息的提取。
1 嵌入式三維信息采集系統
1.1 嵌入式硬件系統組成與數字微鏡器件介紹
整個三維信息采集系統由以多核嵌入式ARM架構芯片為核心的系統控制及圖像處理模塊、以FPGA為核心的結構光模組驅動模塊、數字微鏡光學投影模塊、圖像捕獲模塊構成,功能結構如圖1所示。嵌入式系統控制圖像捕獲模塊與結構光驅動電路的同步,使得投影模塊將結構光圖案投射到待測物體上時,圖像捕獲模塊可以立即進行圖像捕獲,減少時間冗余,提高圖像采集速度,本系統使用了多核嵌入式ARM架構芯片處理捕獲得到的圖像,使整個系統小巧、便攜、方便多場景使用。
在三維信息采集系統完成結構光圖案的投射和圖像捕獲后,系統對捕獲的含有待測物體表面圖案畸變信息的圖片進行處理,分別包括圖像二值化、結構光解碼、獲取畸變量和三維信息提取等步驟。
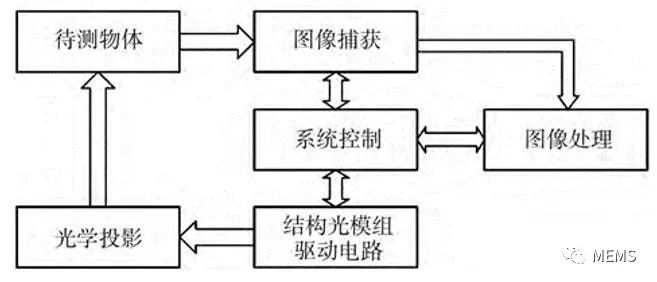
圖1 系統功能結構圖
如圖2所示,硬件系統采用了FPGA作為數字微鏡驅動芯片,高通IMX系列CPU作為主處理器,兩片芯片各帶有兩片DDR3,和USB、eMMC等外設。FPGA負責驅動數字微鏡芯片和數字微鏡復位芯片,通過高速LVDS接口與數字微鏡器件進行通信。i.MX系列CPU在視頻捕獲、視頻處理方面較為成熟,系統采用兩路攝像頭作為圖片或視頻輸入源,兼容了最新的MIPI接口,以滿足不同攝像頭的輸入要求,可適應多場景使用。主處理器在成功提取待測物體的三維信息后,通過USB口上傳至電腦顯示三維還原結果。
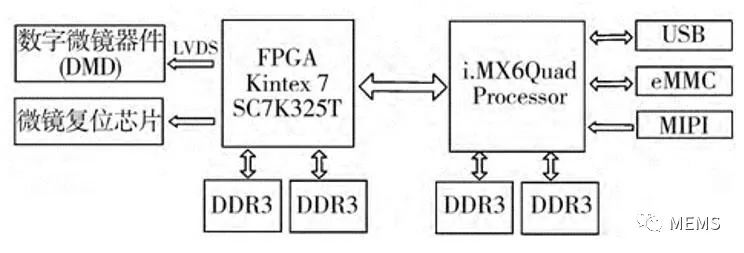
圖2 硬件系統結構圖
數字微鏡器件是一種由CMOS襯底、轉動鉸鏈、鏡架、彈簧端點、反射鏡構成的快速、反射式光開關,其結構如圖3所示。
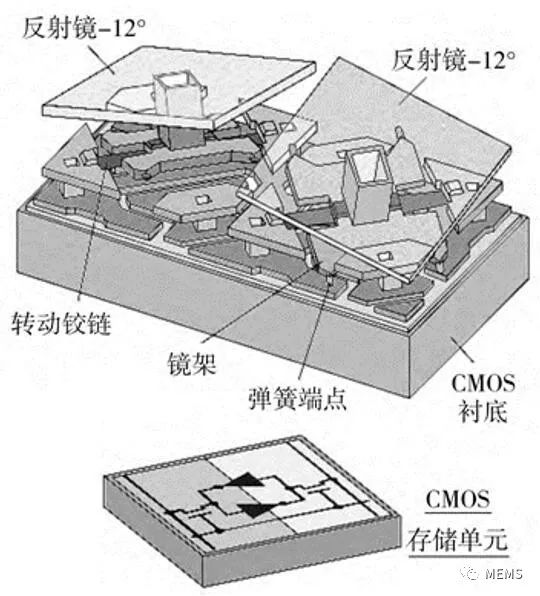
圖3 數字微鏡器件結構圖
鏡子共有三種狀態,當鏡子無旋轉角度時,為初始狀態;當鏡子旋轉+12°時,為開狀態,反射來自光源的光到投射屏幕上;當鏡子旋轉-12°時,為關狀態,反射來自光源的光到光吸收裝置中,投射屏幕呈現黑色效果(不同數字微鏡器件其偏轉角度有所不同)。鏡子的旋轉角度由CMOS輸出信號決定,如圖4所示,數字微鏡的鏡片由偏置電極施加偏置電壓,這樣當CMOS存儲單元輸出邏輯為“0”或“1”所形成的尋址電壓時,尋址電極處形成電場力,轉動鉸鏈帶動鏡子旋轉,直到達到彈簧端點為止。數字微鏡器件的高速開關特性使其適用于高速投影方面的應用。本系統所采用的是0.7英寸,分辨率為1024 X 768的數字微鏡器件,輸入時鐘頻率為400 MHz,數據接口位寬為32 bit,控制位寬2 bit,數據傳輸速率高達25.6 Gpbs,二進制圖案幀率高達32 kHz,完全滿足本系統要求。
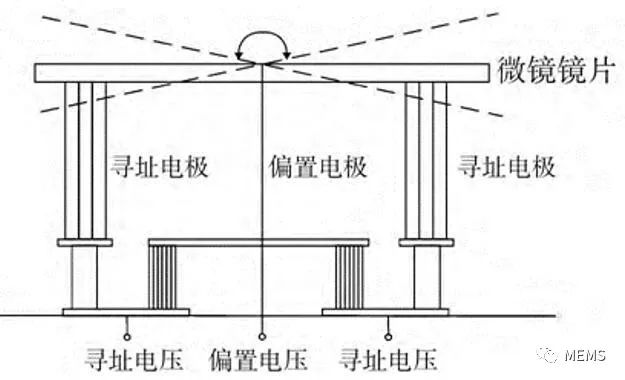
圖4 數字微鏡器件原理圖
1.2 工作原理分析
如圖5所示,結構光向參考平面照射一束光帶,光帶經過待測物體時形成畸變,通過相機捕獲這一畸變量,就可以得到這一束光帶經過的待測物體的高度。經過多組不同數目、不同圖案的光帶照射后,可較全面的獲取待測物體的三維信息。設相機平面與參考平面比例系數為K,結構光與參考平面的法線夾角為θ,待測物體表面P點的高度為H,結構光在待測物體表面P點引起的畸變量為d,相機成像對應的畸變量為d',則可以得到d'與實際待測物體表面高度H的關系為公式(1)和公式(2)所示:
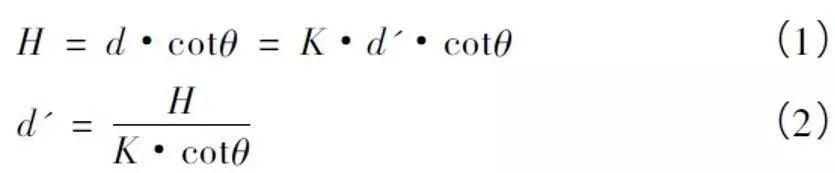
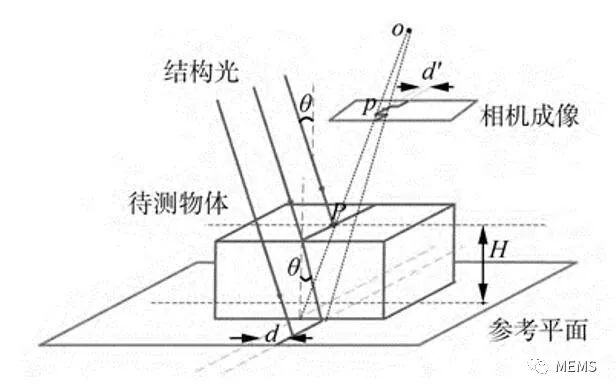
圖5 結構光掃描示意圖
1.3 結構光編解碼方案
從上節可知,為了區分每條光帶的位置,可以對光帶進行編碼,最直接的方式是采用不同灰階進行編碼,但如果采用灰階編碼,則對相機分辨率和環境要求很高,在解碼時會遇到很大困難。因此可以連續將多幅結構光產生的二進制光柵圖案,“1”代表投射白色光束,“0”代表投射黑色光束,以比特面的形式按權重順序投射在待測物體表面,光柵按照黑白相間水平或垂直排布。通過相機捕獲光柵圖案即可確定每條光帶的編碼值,從而得到光柵在待測物體表面的畸變信息。若投影水平像素個數為M的垂直光柵圖案,則可由公式(3)生成,x,y表示圖像坐標,n表示第n幅投影圖像。結果如圖6所示。

圖6 二進制結構光編碼圖案
光柵圖案的編碼方案分為直接二進制編碼和格雷碼編碼。如圖7所示,由于直接二進制編碼會有像素點始終處于黑白光柵的邊緣,因此這種編碼方式對噪聲十分敏感。而格雷碼編碼方式則不會產生這種情況,誤差會大大減小。且在同等權重的比特面中,格雷碼的光柵寬度比直接二進制碼的寬度大一倍,簡化了相機的圖像捕獲難度。

圖7 直接二進制編碼與格雷碼編碼圖案對比
格雷碼編碼可由直接二進制碼異或邏輯得到,如公式(4)所示。

2 基于數字微鏡器件的三維信息獲取設計
2.1 捕獲圖像的二值化算法
在圖像捕獲設備捕獲到所有的攜帶有畸變信息的光柵圖案后,首先要做的是圖像二值化,方便后續處理。此處共有兩種二值化方案,一種為取結構光投射全白圖案和投射全黑圖案投射時捕獲的圖像亮度平均值,如公式(5)所示。

另一種二值化方法是使用互為反相的結構光圖案投射在物體表面,采用互補結構光光柵圖案分別投射到待測物體表面,比較兩幅圖像中的像素點,如第一幅圖像的亮度值大于第二幅圖像,則認為坐標為(x,y)的像素點p(x,y)= 1,反之,p(x,y)= 0。互為反相的結構光圖案使需要投射的圖像數目加倍,但可以省去二值化閾值的計算,避免亮度不均勻時造成的閾值不準確,使圖像二值化更準確快捷。且由于數字微鏡器件的快速開關性能,投射加倍圖像增加的時間可忽略不計。二值化前后如圖8所示。
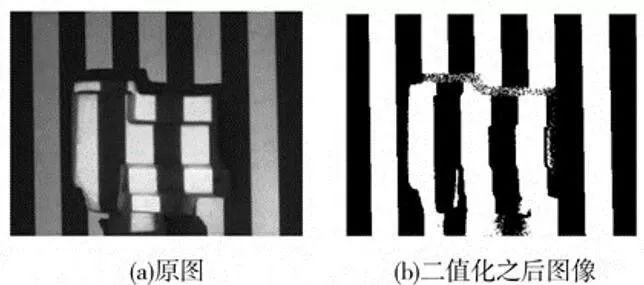
圖8 圖像二值化前后對比
2.2 結構光解碼及畸變量獲取
圖像二值化的工作完成后,首先要將格雷碼編碼的圖像還原成直接二進制碼編碼的圖像,然后根據圖像中的畸變光帶提取出待測物體的畸變信息。
其中,格雷碼還原為二進制碼的編碼圖像過程如公式(6)所示,為公式(4)的逆過程。

格雷碼還原為二進制碼的圖像如圖9所示。
圖9 還原后的二進制碼圖像
最后,利用公式(7)可以從還原得到的二進制編碼圖像提取其中的光柵圖案的畸變量。

由于圖像捕獲設備與參考平面及待測物體間不可能完全平行,會存在一定的角度,導致水平方向上的一個線性畸變,若想消除這個畸變,則需要事先使用不同高度的標準待測物體得到其線性畸變參數。經過試驗測量,得到其線性畸變參數如圖10所示。
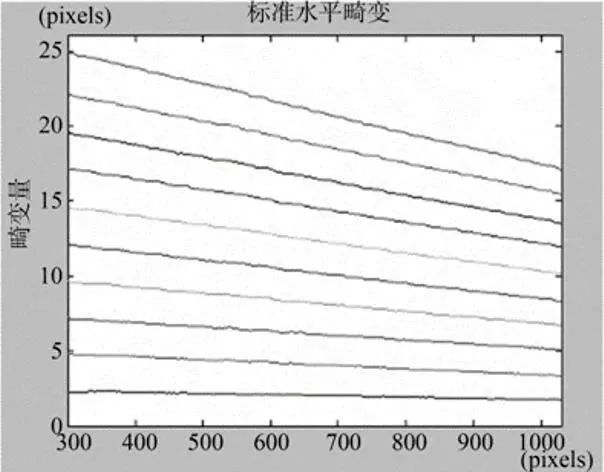
圖10 標準水平畸變
將待測物體的畸變量對應為待測物體高度,并使用之前的畸變量與水平坐標的線性系數進行修正。
最后,為了去除環境背景的影響,事先將不含有待測物體的環境進行上述二值化、編解碼、畸變量提取和水平畸變矯正等操作,然后用含有待測物體的處理結果減去環境背景,可得到僅由待測物體產生的畸變量,經過畸變量與水平坐標的線性系數修正,去除環境背景的影響,可以令無標定的三維視覺系統精度得到提高。畸變量轉換為三維圖像如圖11所示。
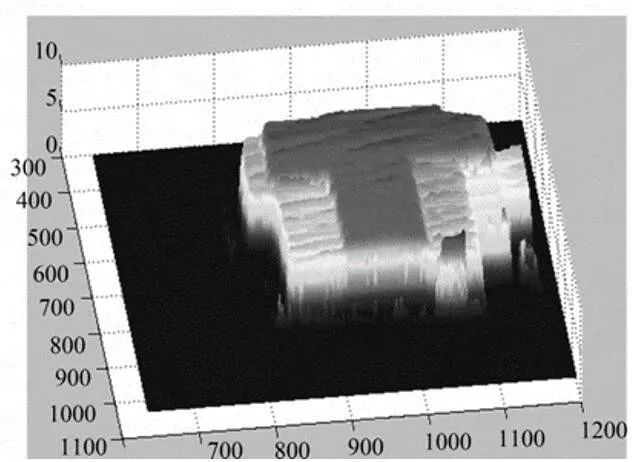
圖11 還原三維圖像
3 結束語
本文介紹了自主設計的,以ARM + FPGA為架構,基于數字微鏡器件的嵌入式三維信息采集系統,相比于普通的投影儀,本系統的投影刷新速度更快,控制接口眾多,便攜,適用于多種場合。本文還提出了一種三維信息獲取算法,通過利用結構光的快速開關特性,大幅提高了三維信息獲取速度。但本系統也存在一系列的不足之處。在二值化過程中,陰影區域可以采用一定的算法加以剔除,使最后的成像更為精確。此外,由于本系統采用了無標定算法,在提高三維信息獲取速度的同時,精度也有所降低。由此提出的改進算法為,可以通過投射水平方向光柵、斜向光柵等多種光柵圖案,充分利用數字微鏡器件的高速開關性能,在短時間內快速采集不同結構光圖案的畸變圖片,并進行處理,將從不同圖案中提取的畸變量進行聯合處理,可快速恢復出精確度更高的三維圖像。
-
嵌入式
+關注
關注
5199文章
20457瀏覽量
334276 -
三維視覺
+關注
關注
1文章
21瀏覽量
1917
原文標題:利用數字微鏡器件的嵌入式三維視覺系統
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
基于溶膠-凝膠法光刻膠的FsLDW微透鏡制備與三維形貌表征

昊衡科技 多芯光纖三維形狀傳感系統,精準感知!

共聚焦顯微鏡三維表征:鏡面鋁光澤度研究
DLP471NE 0.47 英寸全高清數字微鏡器件:技術解析與應用指南
DLP781NE 0.78 1080P 數字微鏡器件:技術解析與應用指南

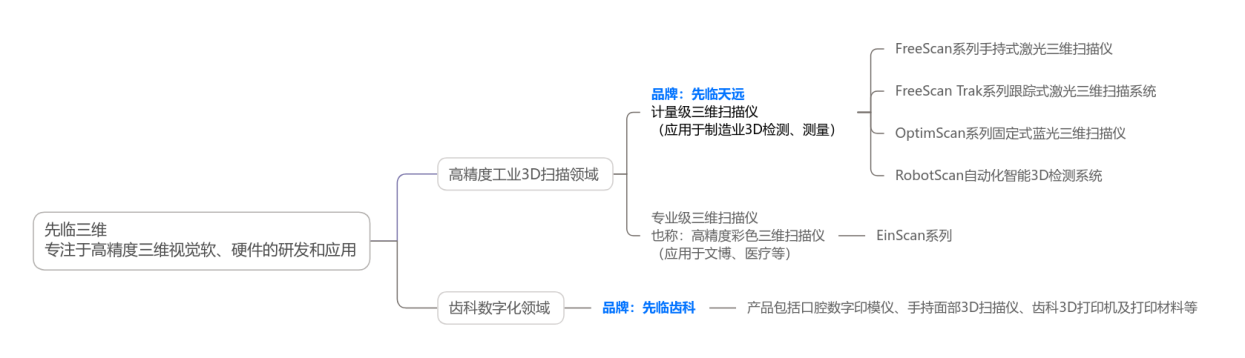
一文讀懂 | 三維視覺領域國家級制造業單項冠軍——先臨三維的品牌布局
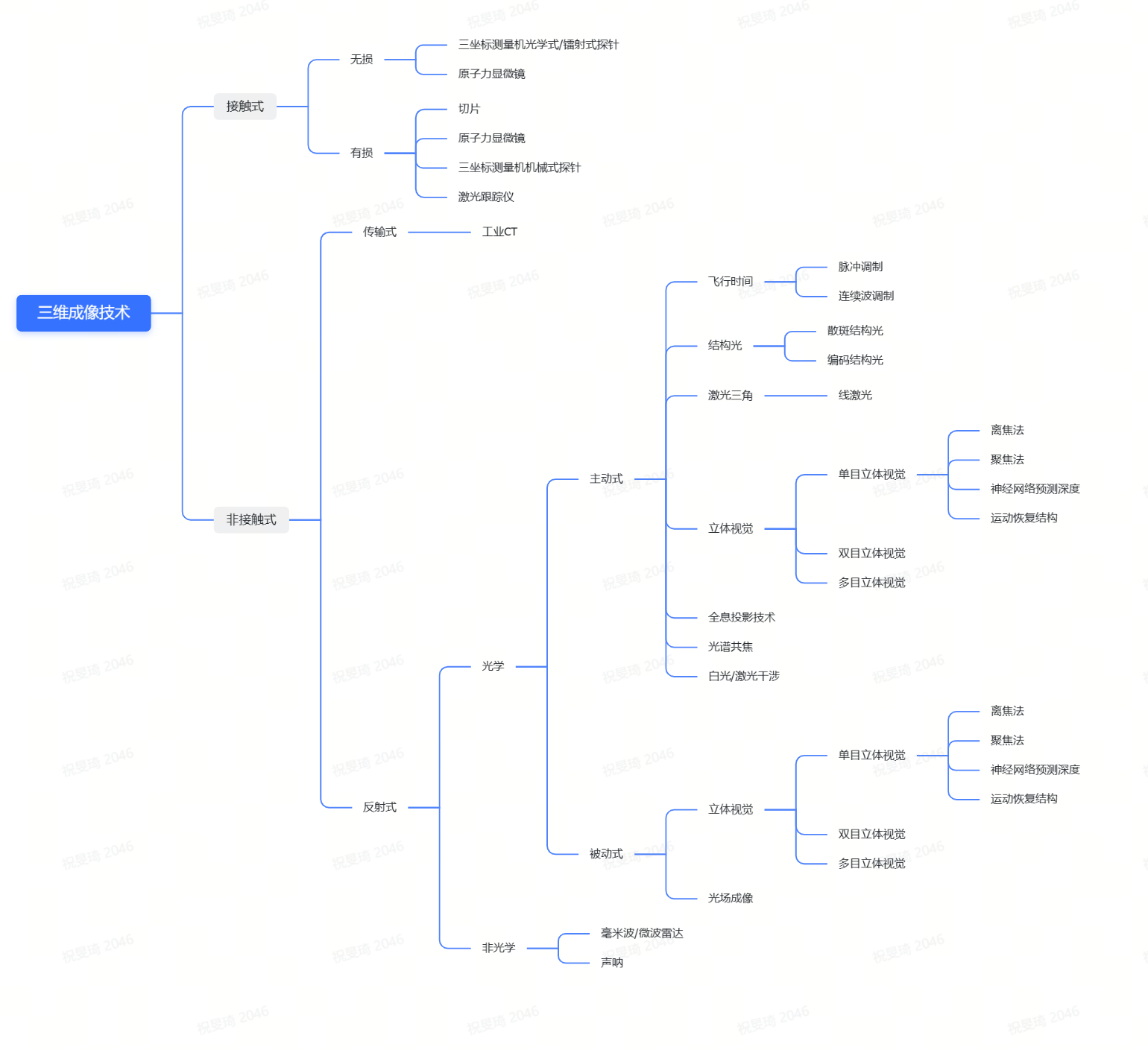
機器視覺三維成像技術簡介(一)
導遠科技收獲三維視覺技術客戶批量訂單
入行嵌入式應該怎么準備?
航天宏圖全棧式3DGS實景三維重建系統解決方案




 工商網監
工商網監
評論